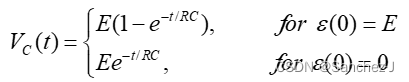
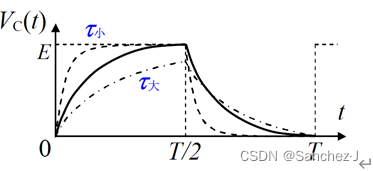
- RC串联电路的暂态过程:
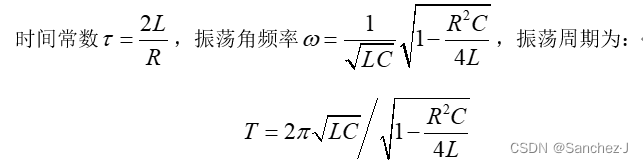
- RLC串联电路的暂态过程:
![]()
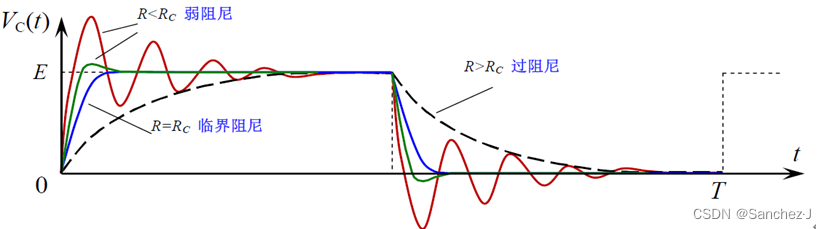
- 三种解:
![]()

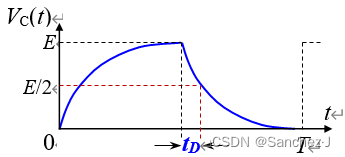
- 半衰期测量法测量时间常数:
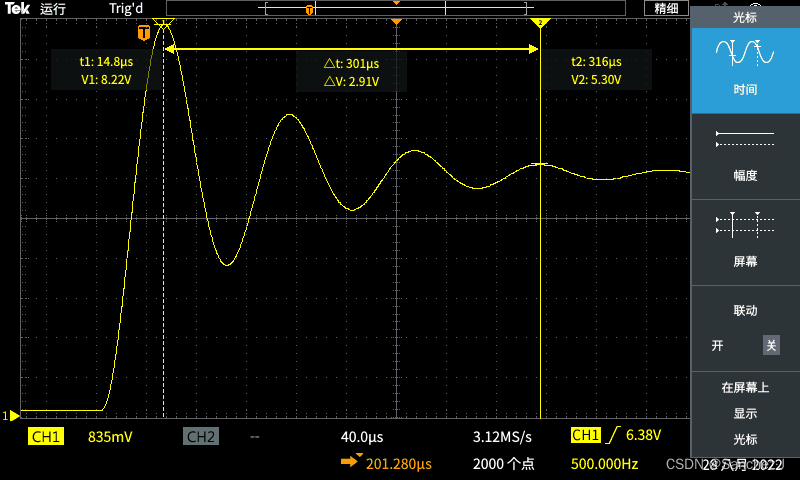
- 测振荡周期:
- 不断增大电阻直至振荡凸起峰刚好消失,此时即为临界阻尼状态,记下电阻箱的阻值R,于是得到临界电阻
的测量值为:
- 认为将曲线凸起的部分作横向放大会更加看得更加明显是错误的几何观,恰恰相反,应该横向缩回至单个周期才能更容易判断凸起的小峰!
![]()
![]()
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/329777.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!