阅读目录
- 什么是dockerfile?
- Dockerfile的基本结构
- Dockerfile文件说明
什么是dockerfile?
Dockerfile是一个包含用于组合映像的命令的文本文档。可以使用在命令行中调用任何命令。 Docker通过读取Dockerfile中的指令自动生成映像。
docker build命令用于从Dockerfile构建映像。可以在docker build命令中使用-f标志指向文件系统中任何位置的Dockerfile。
例:
docker build -f /path/to/a/Dockerfile
Dockerfile的基本结构
Dockerfile 一般分为四部分:
1、基础镜像信息
2、维护者信息
3、镜像操作指令和容器启动时执行指令,
4、’#’ 为 Dockerfile 中的注释。
Dockerfile文件说明
Docker以从上到下的顺序运行Dockerfile的指令。为了指定基本映像,第一条指令必须是FROM。一个声明以#字符开头则被视为注释。可以在Docker文件中使用RUN,CMD,FROM,EXPOSE,ENV等指令。
在这里列出了一些常用的指令。
FROM:指定基础镜像,必须为第一个命令
格式:FROM <image>FROM <image>:<tag>FROM <image>@<digest>
示例:FROM mysql:5.6
注:tag或digest是可选的,如果不使用这两个值时,会使用latest版本的基础镜像MAINTAINER: 维护者信息
格式:MAINTAINER <name>
示例:MAINTAINER Jasper XuMAINTAINER sorex@163.comMAINTAINER Jasper Xu <sorex@163.com>RUN:构建镜像时执行的命令
RUN用于在镜像容器中执行命令,其有以下两种命令执行方式:
shell执行
格式:RUN <command>
exec执行
格式:RUN ["executable", "param1", "param2"]
示例:RUN ["executable", "param1", "param2"]RUN apk updateRUN ["/etc/execfile", "arg1", "arg1"]
注:
RUN指令创建的中间镜像会被缓存,并会在下次构建中使用。如果不想使用这些缓存镜像,可以在构建时指定--no-cache参数,如:docker build --no-cache
ADD:将本地文件添加到容器中,tar类型文件会自动解压(网络压缩资源不会被解压),可以访问网络资源,类似wget
格式:ADD <src>... <dest>ADD ["<src>",... "<dest>"] 用于支持包含空格的路径
示例:ADD hom* /mydir/ # 添加所有以"hom"开头的文件ADD hom?.txt /mydir/ # ? 替代一个单字符,例如:"home.txt"ADD test relativeDir/ # 添加 "test" 到 `WORKDIR`/relativeDir/ADD test /absoluteDir/ # 添加 "test" 到 /absoluteDir/COPY:功能类似ADD,但是是不会自动解压文件,也不能访问网络资源
CMD:构建容器后调用,也就是在容器启动时才进行调用。
格式:CMD ["executable","param1","param2"] (执行可执行文件,优先)CMD ["param1","param2"] (设置了ENTRYPOINT,则直接调用ENTRYPOINT添加参数)CMD command param1 param2 (执行shell内部命令)
示例:CMD echo "This is a test." | wc -CMD ["/usr/bin/wc","--help"]
注:
CMD不同于RUN,CMD用于指定在容器启动时所要执行的命令,而RUN用于指定镜像构建时所要执行的命令。
ENTRYPOINT:配置容器,使其可执行化。配合CMD可省去"application",只使用参数。
格式:ENTRYPOINT ["executable", "param1", "param2"] (可执行文件, 优先)ENTRYPOINT command param1 param2 (shell内部命令)
示例:FROM ubuntuENTRYPOINT ["top", "-b"]CMD ["-c"]注: 1、ENTRYPOINT与CMD非常类似,不同的是通过“docker run”执行的命令不会覆盖ENTRYPOINT,而“docker run”命令中指定的任何参数,都会被当做参数再次传递给ENTRYPOINT。 2、Dockerfile中只允许有一个ENTRYPOINT命令,多指定时会覆盖前面的设置,而只执行最后的ENTRYPOINT指令。
LABEL:用于为镜像添加元数据
格式:LABEL <key>=<value> <key>=<value> <key>=<value> ...
示例:LABEL version="1.0" description="这是一个Web服务器" by="IT笔录"注:使用LABEL指定元数据时,一条LABEL指定可以指定一或多条元数据,指定多条元数据时不同元数据之间通过空格分隔。推荐将所有的元数据通过一条LABEL指令指定,以免生成过多的中间镜像。
ENV:设置环境变量
格式:ENV <key> <value> ENV <key>=<value> ...
示例:ENV myName John DoeENV myDog Rex The DogENV myCat=fluffy#<key>之后的所有内容均会被视为其<value>的组成部分,因此,一次只能设置一个变量
#可以设置多个变量,每个变量为一个"<key>=<value>"的键值对,如果<key>中包含空格,可以使用\来进行转义,也可以通过""来进行标示;另外,反斜线也可以用于续行
EXPOSE:指定于外界交互的端口
格式:EXPOSE <port> [<port>...]
示例:EXPOSE 80 443EXPOSE 8080EXPOSE 11211/tcp 11211/udp注:EXPOSE并不会让容器的端口访问到主机。要使其可访问,需要在“docker run”运行容器时通过-p来发布这些端口,或通过"-P"参数来发布EXPOSE导出的所有端口
VOLUME:用于指定持久化目录
格式:VOLUME ["/path/to/dir"]
示例:VOLUME ["/data"]VOLUME ["/var/www", "/var/log/apache2", "/etc/apache2"注:一个卷可以存在于一个或多个容器的指定目录,该目录可以绕过联合文件系统,并具有以下功能:
1 卷可以容器间共享和重用 2 容器并不一定要和其它容器共享卷 3 修改卷后会立即生效 4 对卷的修改不会对镜像产生影响 5 卷会一直存在,直到没有任何容器在使用它
WORKDIR:工作目录,类似于cd命令
格式:WORKDIR /path/to/workdir
示例:WORKDIR /a (这时工作目录为/a)WORKDIR b (这时工作目录为/a/b)WORKDIR c (这时工作目录为/a/b/c)注:通过WORKDIR设置工作目录后,Dockerfile中其后的命令RUN、CMD、ENTRYPOINT、ADD、COPY等命令都会在该目录下执行。在使用"docker run"运行容器时,可以通过-w参数覆盖构建时所设置的工作目录。
USER:指定运行容器时的用户名或 UID,后续的 RUN 也会使用指定用户。使用USER指定用户时,可以使用用户名、UID或GID,或是两者的组合。当服务不需要管理员权限时,可以通过该命令指定运行用户。并且可以在之前创建所需要的用户
格式:USER userUSER user:groupUSER uidUSER uid:gidUSER user:gidUSER uid:group示例:USER www注:
使用USER指定用户后,Dockerfile中其后的命令RUN、CMD、ENTRYPOINT都将使用该用户。镜像构建完成后,通过docker run运行容器时,可以通过-u参数来覆盖所指定的用户。
ARG:用于指定传递给构建运行时的变量
格式:ARG <name>[=<default value>]
示例:ARG siteARG build_user=wwwONBUILD:用于设置镜像触发器
格式:ONBUILD [INSTRUCTION]
示例:ONBUILD ADD . /app/srcONBUILD RUN /usr/local/bin/python-build --dir /app/src注:当所构建的镜像被用做其它镜像的基础镜像,该镜像中的触发器将会被钥触发
以下是一个小例子:
# This my first nginx Dockerfile
# Version 1.0# Base images 基础镜像
FROM centos#MAINTAINER 维护者信息
MAINTAINER tianfeiyu #ENV 设置环境变量
ENV PATH /usr/local/nginx/sbin:$PATH#ADD 文件放在当前目录下,拷过去会自动解压
ADD nginx-1.8.0.tar.gz /usr/local/
ADD epel-release-latest-7.noarch.rpm /usr/local/ #RUN 执行以下命令
RUN rpm -ivh /usr/local/epel-release-latest-7.noarch.rpm
RUN yum install -y wget lftp gcc gcc-c++ make openssl-devel pcre-devel pcre && yum clean all
RUN useradd -s /sbin/nologin -M www#WORKDIR 相当于cd
WORKDIR /usr/local/nginx-1.8.0 RUN ./configure --prefix=/usr/local/nginx --user=www --group=www --with-http_ssl_module --with-pcre && make && make installRUN echo "daemon off;" >> /etc/nginx.conf#EXPOSE 映射端口
EXPOSE 80#CMD 运行以下命令
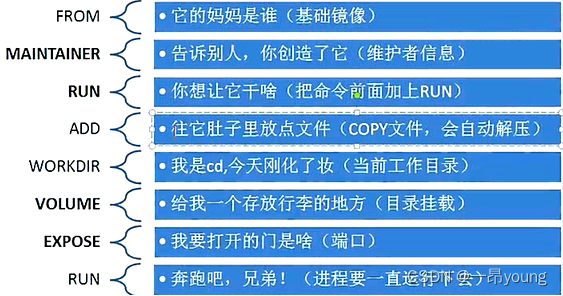
CMD ["nginx"]最后用一张图解释常用指令的意义^-^