论文地址:https://arxiv.org/pdf/2103.14030.pdf
代码地址: GitHub - microsoft/Swin-Transformer: This is an official implementation for "Swin Transformer: Hierarchical Vision Transformer using Shifted Windows".
1.是什么?
Swin Transformer是一种用于图像分类的深度学习模型,它在2021年提出并取得了很好的效果。Swin Transformer的网络结构是基于Transformer架构的,但与传统的Transformer不同,它引入了一种新的分层机制,以处理大尺寸图像。
Swin Transformer的核心思想是将图像分割成小的图块,并在这些图块上应用Transformer模块。这种分块的方式使得Swin Transformer能够处理大尺寸的图像,而不会受到传统Transformer中注意力计算复杂度的限制。
Swin Transformer的网络结构由多个阶段组成,每个阶段都包含了多个分块层。在每个分块层中,图块会通过自注意力机制进行特征交互,并通过跨窗口注意力机制进行全局信息的传递。这种分块和跨窗口的机制使得Swin Transformer能够捕捉到不同尺度的特征。
通过在大规模图像分类任务上的实验证明,Swin Transformer在准确性和计算效率方面都取得了很好的表现。它在ImageNet数据集上的Top-1准确率超过了90%,并且相比于其他图像分类模型,具有更低的计算复杂度。
总结起来,Swin Transformer是一种基于Transformer架构的图像分类模型,通过分块和跨窗口的机制,能够处理大尺寸图像并取得较好的准确性和计算效率。
2.为什么?
最初的ViT模型,它有几个明显的问题:
- 建模能力方面,强行分割patch破坏了原有的邻域结构,也不再具有卷积的那种空间不变性
- 复杂度方面,之前的ViT是在每层都做全局(global)自注意力。如果保持每个Patch的大小不变,随着图片尺寸的变大,Patch的个数会增加,而Patch的个数等于进入Transformer的Token个数,且Transformer的时间复杂度是O(n^2)。
- 易用性方面,由于Embedding(结构是全连接)和图片大小是绑定的,所以预训练、精调和推理使用的图片必须是完全同等的尺寸。
相比于Vision Transformer(讲解),Swin Transformer做出了几点改进:
- 层次化构建方法:使用了类似卷积神经网络中的层次化构建方法(Hierarchical feature maps),比如特征图尺寸中有对图像下采样4倍的,8倍的以及16倍的,这样的backbone有助于在此基础上构建目标检测,实例分割等任务。而Vision Transformer中直接下采样16倍,后面的特征图也是维持这个下采样率不变。
- 特征图划分:在Swin Transformer中使用了Windows Multi-Head Self-Attention(W-MSA)的概念,比如在下图的4倍下采样和8倍下采样中,将特征图划分成了多个不相交的窗口,并且Multi-Head Self-Attention只在每个窗口内进行。相对于Vision Transformer中直接对整个特征图进行Multi-Head Self-Attention,这样做的目的是减少计算量,尤其是在浅层特征图很大的时候。
- 窗口变换:特征图划分虽然减少了计算量,但会隔绝不同窗口之间的信息传递,因此所以在论文中作者又提出了Shifted Windows Multi-Head Self-Attention(SW-MSA)的概念,目的在于使信息在相邻窗口中传递。
3.怎么样?
3.1网络结构

它分为几个阶段
- Embedding Stage(stage1)。将图片划分为若干
4*4的patch,使用线性变换来将patch变为Embedding向量,这一步和ViT是一样的。但是注意,这里的patch比ViT的14*14小了很多。 - 若干个使用Swin Transformer 的Stage(stage2-4)。这里模仿了经典卷积网络backbone的结构,在每个Stage都将feature map(对应到Vit就是Patch或Token的个数)变成原来的四分之一。这是通过简单地将
2*2patch合并成一个来完成的。同时,用Swin Transformer替代了原来的标准Transformer,主要变化如下- 用M*M大小的窗口自注意力代替全局自注意力。因为自注意力机制时间复杂度是O(n^2),通过减少参加自注意力的元素,将原来关于patch数平方复杂度的计算变为关于patch数线性复杂度
- 用对角线方向的shift来使Swin Transformer里的每一层窗口都是不同的,这样一个patch有机会和不同的patch交互。这里还使用了一个mask trick来使得这种shift的自注意力计算更高效。
- 添加了相对位置偏置(relative position bias),对比发现这比添加绝对位置embedding效果好很多
3.2 Patch Merging 模块
Patch Merging 模块将 尺寸为 H×W 的 Patch 块首先进行拼接并在 channel 维度上进行concatenate 构成了 H/2×W/2×4C 的特征图,然后再进行 Layer Normalization 操作进行正则化,然后通过一个 Linear 层形成了一个 H/2×W/2×2C ,完成了特征图的下采样过程。其中 size 缩小为原来的 1/2,channel 扩大为原来的 2 倍。

3.3 W-MSA 模块
ViT 网络中的 MSA 通过 Self-Attention 使得每一个像素点都可以和其他的像素点进行内积从而得到所有像素点的信息,从而获得丰富的全局信息。但是每个像素点都需要和其他像素点进行信息交换,计算量巨大,网络的执行效率低下。因此 Swin-T 将 MSA 分个多个固定的 Windows 构成了 W-MSA,每个 Windows 之间的像素点只能与该 Windows 中的其他像素点进行内积从而获得信息,这样便大幅的减小了计算量,提高了网络的运算效率。MSA 和 W-MAS 的计算量如下所示:

其中h、w和C分别代表特征图的高度、宽度和深度,M代表每个 Windows 的大小。假定 h=w=112,M=7,C=128可以计算出 W-MSA 节省了40124743680 FLOPs。
3.4 SW-MSA 模块
虽然 W-MSA 通过划分 Windows 的方法减少了计算量,但是由于各个 Windows 之间无法进行信息的交互,因此可以看作其“感受野”缩小,无法得到较全局准确的信息从而影响网络的准确度。
为了实现不同窗口之间的信息交互,我们可以将窗口滑动,偏移窗口使其包含不同的像素点,然后再进行 W-MSA 计算,将两次 W-MSA 计算的结果进行连接便可结合两个不同的 Windows 中的像素点所包含的信息从而实现 Windows 之间的信息共通。
偏移窗口的 W-MSA 构成了 SW-MSA 模块,其 Windows 在 W-MSA 的基础上向右下角偏移了两个 Patch,形成了9个大小不一的块,然后使用 cyclic shift 将这 9 个块平移拼接成与 W-MSA 对应的 4 个大小相同的块,再通过 masked MSA 对这 4 个拼接块进行对应的模板计算完成信息的提取,最后通过 reverse cyclic shift 将信息数据 patch 平移回原先的位置。通过 SW-MSA 机制完成了偏移窗口的像素点的 MSA 计算并实现了不同窗口间像素点的信息交流,从而间接扩大了网络的“感受野”,提高了信息的利用效率。

3.5 Relative position bias 机制
Swin-T 网络还在 Attention 计算中引入了相对位置偏置机制去提高网络的整体准确率表现,通过引入相对位置偏置机制,其准确度能够提高 1.2%~2.3% 不等。 以 2×2 的特征图为例,首先我们需要对特征图的各个块进行绝对位置的编号,得到每个块的绝对位置索引。然后对每个块计算其与其他块之间的相对位置,计算方法为该块的绝对位置索引减去其他块的绝对位置索引,可以得到每个块的相对位置索引矩阵。将每个块的相对位置索引矩阵展平连接构成了整个特征图的相对位置索引矩阵,具体的计算流程如下图所示。

Swin-T并不是使用二维元组形式的相对位置索引矩阵,而是通过将二维元组形式的相对位置索引映射为一维的相对位置偏置(Relative position bias)来构成相应的矩阵,具体的映射方法如下:1. 将对应的相对位置行索引和列索引分别加上 M-1, 2. 将行索引和列索引分别乘以 2M-1, 3. 将行索引和列索引相加,再使用对应的相对位置偏置表(Relative position bias table)进行映射即可得到最终的相对位置偏置B。具体的计算流程如下所示:

加入了相对位置偏置机制的 Attention 计算公式如下所示:

其中B即为上述计算得到的相对位置偏置。
3.6 Swin Transformer 网络详细配置
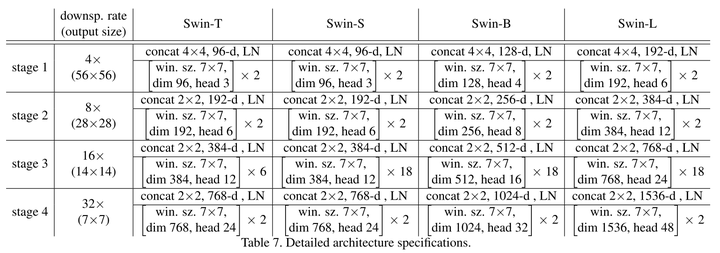
在论文中 Swin-T 分为四种不同规格的网络,每一种规格有着不同的 Block 堆叠次数和 channel 数以应对不同规模的任务及复杂度要求。一般来说规格越高的网络参数个数越多,所能得到的信息也就越多,预测的准确程度也就越高,但是其计算复杂度和训练时间也就越大,需要根据自己的任务要求和配置运用适合规格的 Swin-T 网络。各规格网络的详细配置如下图所示:
3.7代码实现
# --------------------------------------------------------
# Swin Transformer
# Copyright (c) 2021 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ze Liu
# --------------------------------------------------------import torch
import torch.nn as nn
import torch.utils.checkpoint as checkpoint
from timm.models.layers import DropPath, to_2tuple, trunc_normal_try:import os, syskernel_path = os.path.abspath(os.path.join('..'))sys.path.append(kernel_path)from kernels.window_process.window_process import WindowProcess, WindowProcessReverseexcept:WindowProcess = NoneWindowProcessReverse = Noneprint("[Warning] Fused window process have not been installed. Please refer to get_started.md for installation.")class Mlp(nn.Module):def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.fc2 = nn.Linear(hidden_features, out_features)self.drop = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return xdef window_partition(x, window_size):"""Args:x: (B, H, W, C)window_size (int): window sizeReturns:windows: (num_windows*B, window_size, window_size, C)"""B, H, W, C = x.shapex = x.view(B, H // window_size, window_size, W // window_size, window_size, C)windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)return windowsdef window_reverse(windows, window_size, H, W):"""Args:windows: (num_windows*B, window_size, window_size, C)window_size (int): Window sizeH (int): Height of imageW (int): Width of imageReturns:x: (B, H, W, C)"""B = int(windows.shape[0] / (H * W / window_size / window_size))x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)return xclass WindowAttention(nn.Module):r""" Window based multi-head self attention (W-MSA) module with relative position bias.It supports both of shifted and non-shifted window.Args:dim (int): Number of input channels.window_size (tuple[int]): The height and width of the window.num_heads (int): Number of attention heads.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if setattn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0proj_drop (float, optional): Dropout ratio of output. Default: 0.0"""def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # Wh, Wwself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim ** -0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH# get pair-wise relative position index for each token inside the windowcoords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Wwcoords_flatten = torch.flatten(coords, 1) # 2, Wh*Wwrelative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Wwrelative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Wwself.register_buffer("relative_position_index", relative_position_index)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)trunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, mask=None):"""Args:x: input features with shape of (num_windows*B, N, C)mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None"""B_, N, C = x.shapeqkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)q = q * self.scaleattn = (q @ k.transpose(-2, -1))relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nHrelative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Wwattn = attn + relative_position_bias.unsqueeze(0)if mask is not None:nW = mask.shape[0]attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, N, N)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)x = (attn @ v).transpose(1, 2).reshape(B_, N, C)x = self.proj(x)x = self.proj_drop(x)return xdef extra_repr(self) -> str:return f'dim={self.dim}, window_size={self.window_size}, num_heads={self.num_heads}'def flops(self, N):# calculate flops for 1 window with token length of Nflops = 0# qkv = self.qkv(x)flops += N * self.dim * 3 * self.dim# attn = (q @ k.transpose(-2, -1))flops += self.num_heads * N * (self.dim // self.num_heads) * N# x = (attn @ v)flops += self.num_heads * N * N * (self.dim // self.num_heads)# x = self.proj(x)flops += N * self.dim * self.dimreturn flopsclass SwinTransformerBlock(nn.Module):r""" Swin Transformer Block.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resulotion.num_heads (int): Number of attention heads.window_size (int): Window size.shift_size (int): Shift size for SW-MSA.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float, optional): Stochastic depth rate. Default: 0.0act_layer (nn.Module, optional): Activation layer. Default: nn.GELUnorm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormfused_window_process (bool, optional): If True, use one kernel to fused window shift & window partition for acceleration, similar for the reversed part. Default: False"""def __init__(self, dim, input_resolution, num_heads, window_size=7, shift_size=0,mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,act_layer=nn.GELU, norm_layer=nn.LayerNorm,fused_window_process=False):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratioif min(self.input_resolution) <= self.window_size:# if window size is larger than input resolution, we don't partition windowsself.shift_size = 0self.window_size = min(self.input_resolution)assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim, window_size=to_2tuple(self.window_size), num_heads=num_heads,qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)if self.shift_size > 0:# calculate attention mask for SW-MSAH, W = self.input_resolutionimg_mask = torch.zeros((1, H, W, 1)) # 1 H W 1h_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1mask_windows = mask_windows.view(-1, self.window_size * self.window_size)attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))else:attn_mask = Noneself.register_buffer("attn_mask", attn_mask)self.fused_window_process = fused_window_processdef forward(self, x):H, W = self.input_resolutionB, L, C = x.shapeassert L == H * W, "input feature has wrong size"shortcut = xx = self.norm1(x)x = x.view(B, H, W, C)# cyclic shiftif self.shift_size > 0:if not self.fused_window_process:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))# partition windowsx_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, Celse:x_windows = WindowProcess.apply(x, B, H, W, C, -self.shift_size, self.window_size)else:shifted_x = x# partition windowsx_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, Cx_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C# W-MSA/SW-MSAattn_windows = self.attn(x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)# reverse cyclic shiftif self.shift_size > 0:if not self.fused_window_process:shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' Cx = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:x = WindowProcessReverse.apply(attn_windows, B, H, W, C, self.shift_size, self.window_size)else:shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' Cx = shifted_xx = x.view(B, H * W, C)x = shortcut + self.drop_path(x)# FFNx = x + self.drop_path(self.mlp(self.norm2(x)))return xdef extra_repr(self) -> str:return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"def flops(self):flops = 0H, W = self.input_resolution# norm1flops += self.dim * H * W# W-MSA/SW-MSAnW = H * W / self.window_size / self.window_sizeflops += nW * self.attn.flops(self.window_size * self.window_size)# mlpflops += 2 * H * W * self.dim * self.dim * self.mlp_ratio# norm2flops += self.dim * H * Wreturn flopsclass PatchMerging(nn.Module):r""" Patch Merging Layer.Args:input_resolution (tuple[int]): Resolution of input feature.dim (int): Number of input channels.norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):super().__init__()self.input_resolution = input_resolutionself.dim = dimself.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)self.norm = norm_layer(4 * dim)def forward(self, x):"""x: B, H*W, C"""H, W = self.input_resolutionB, L, C = x.shapeassert L == H * W, "input feature has wrong size"assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even."x = x.view(B, H, W, C)x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 Cx1 = x[:, 1::2, 0::2, :] # B H/2 W/2 Cx2 = x[:, 0::2, 1::2, :] # B H/2 W/2 Cx3 = x[:, 1::2, 1::2, :] # B H/2 W/2 Cx = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*Cx = x.view(B, -1, 4 * C) # B H/2*W/2 4*Cx = self.norm(x)x = self.reduction(x)return xdef extra_repr(self) -> str:return f"input_resolution={self.input_resolution}, dim={self.dim}"def flops(self):H, W = self.input_resolutionflops = H * W * self.dimflops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dimreturn flopsclass BasicLayer(nn.Module):""" A basic Swin Transformer layer for one stage.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resolution.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.fused_window_process (bool, optional): If True, use one kernel to fused window shift & window partition for acceleration, similar for the reversed part. Default: False"""def __init__(self, dim, input_resolution, depth, num_heads, window_size,mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0.,drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False,fused_window_process=False):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.depth = depthself.use_checkpoint = use_checkpoint# build blocksself.blocks = nn.ModuleList([SwinTransformerBlock(dim=dim, input_resolution=input_resolution,num_heads=num_heads, window_size=window_size,shift_size=0 if (i % 2 == 0) else window_size // 2,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias, qk_scale=qk_scale,drop=drop, attn_drop=attn_drop,drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer,fused_window_process=fused_window_process)for i in range(depth)])# patch merging layerif downsample is not None:self.downsample = downsample(input_resolution, dim=dim, norm_layer=norm_layer)else:self.downsample = Nonedef forward(self, x):for blk in self.blocks:if self.use_checkpoint:x = checkpoint.checkpoint(blk, x)else:x = blk(x)if self.downsample is not None:x = self.downsample(x)return xdef extra_repr(self) -> str:return f"dim={self.dim}, input_resolution={self.input_resolution}, depth={self.depth}"def flops(self):flops = 0for blk in self.blocks:flops += blk.flops()if self.downsample is not None:flops += self.downsample.flops()return flopsclass PatchEmbed(nn.Module):r""" Image to Patch EmbeddingArgs:img_size (int): Image size. Default: 224.patch_size (int): Patch token size. Default: 4.in_chans (int): Number of input image channels. Default: 3.embed_dim (int): Number of linear projection output channels. Default: 96.norm_layer (nn.Module, optional): Normalization layer. Default: None"""def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):super().__init__()img_size = to_2tuple(img_size)patch_size = to_2tuple(patch_size)patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]self.img_size = img_sizeself.patch_size = patch_sizeself.patches_resolution = patches_resolutionself.num_patches = patches_resolution[0] * patches_resolution[1]self.in_chans = in_chansself.embed_dim = embed_dimself.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)if norm_layer is not None:self.norm = norm_layer(embed_dim)else:self.norm = Nonedef forward(self, x):B, C, H, W = x.shape# FIXME look at relaxing size constraintsassert H == self.img_size[0] and W == self.img_size[1], \f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw Cif self.norm is not None:x = self.norm(x)return xdef flops(self):Ho, Wo = self.patches_resolutionflops = Ho * Wo * self.embed_dim * self.in_chans * (self.patch_size[0] * self.patch_size[1])if self.norm is not None:flops += Ho * Wo * self.embed_dimreturn flopsclass SwinTransformer(nn.Module):r""" Swin TransformerA PyTorch impl of : `Swin Transformer: Hierarchical Vision Transformer using Shifted Windows` -https://arxiv.org/pdf/2103.14030Args:img_size (int | tuple(int)): Input image size. Default 224patch_size (int | tuple(int)): Patch size. Default: 4in_chans (int): Number of input image channels. Default: 3num_classes (int): Number of classes for classification head. Default: 1000embed_dim (int): Patch embedding dimension. Default: 96depths (tuple(int)): Depth of each Swin Transformer layer.num_heads (tuple(int)): Number of attention heads in different layers.window_size (int): Window size. Default: 7mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: Nonedrop_rate (float): Dropout rate. Default: 0attn_drop_rate (float): Attention dropout rate. Default: 0drop_path_rate (float): Stochastic depth rate. Default: 0.1norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.ape (bool): If True, add absolute position embedding to the patch embedding. Default: Falsepatch_norm (bool): If True, add normalization after patch embedding. Default: Trueuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: Falsefused_window_process (bool, optional): If True, use one kernel to fused window shift & window partition for acceleration, similar for the reversed part. Default: False"""def __init__(self, img_size=224, patch_size=4, in_chans=3, num_classes=1000,embed_dim=96, depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24],window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None,drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1,norm_layer=nn.LayerNorm, ape=False, patch_norm=True,use_checkpoint=False, fused_window_process=False, **kwargs):super().__init__()self.num_classes = num_classesself.num_layers = len(depths)self.embed_dim = embed_dimself.ape = apeself.patch_norm = patch_normself.num_features = int(embed_dim * 2 ** (self.num_layers - 1))self.mlp_ratio = mlp_ratio# split image into non-overlapping patchesself.patch_embed = PatchEmbed(img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dim,norm_layer=norm_layer if self.patch_norm else None)num_patches = self.patch_embed.num_patchespatches_resolution = self.patch_embed.patches_resolutionself.patches_resolution = patches_resolution# absolute position embeddingif self.ape:self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))trunc_normal_(self.absolute_pos_embed, std=.02)self.pos_drop = nn.Dropout(p=drop_rate)# stochastic depthdpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule# build layersself.layers = nn.ModuleList()for i_layer in range(self.num_layers):layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer),input_resolution=(patches_resolution[0] // (2 ** i_layer),patches_resolution[1] // (2 ** i_layer)),depth=depths[i_layer],num_heads=num_heads[i_layer],window_size=window_size,mlp_ratio=self.mlp_ratio,qkv_bias=qkv_bias, qk_scale=qk_scale,drop=drop_rate, attn_drop=attn_drop_rate,drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],norm_layer=norm_layer,downsample=PatchMerging if (i_layer < self.num_layers - 1) else None,use_checkpoint=use_checkpoint,fused_window_process=fused_window_process)self.layers.append(layer)self.norm = norm_layer(self.num_features)self.avgpool = nn.AdaptiveAvgPool1d(1)self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()self.apply(self._init_weights)def _init_weights(self, m):if isinstance(m, nn.Linear):trunc_normal_(m.weight, std=.02)if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.LayerNorm):nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1.0)@torch.jit.ignoredef no_weight_decay(self):return {'absolute_pos_embed'}@torch.jit.ignoredef no_weight_decay_keywords(self):return {'relative_position_bias_table'}def forward_features(self, x):x = self.patch_embed(x)if self.ape:x = x + self.absolute_pos_embedx = self.pos_drop(x)for layer in self.layers:x = layer(x)x = self.norm(x) # B L Cx = self.avgpool(x.transpose(1, 2)) # B C 1x = torch.flatten(x, 1)return xdef forward(self, x):x = self.forward_features(x)x = self.head(x)return xdef flops(self):flops = 0flops += self.patch_embed.flops()for i, layer in enumerate(self.layers):flops += layer.flops()flops += self.num_features * self.patches_resolution[0] * self.patches_resolution[1] // (2 ** self.num_layers)flops += self.num_features * self.num_classesreturn flops
参考:
ViT学习笔记2:Swin Transformer
Swin Transformer 相比之前的 ViT 模型,做出了哪些改进? 关注者
图解Swin Transformer
经典文献阅读之--Swin Transformer