LabVIEW开发光线追踪可视化分段反射器测试台
为了满足美国国家航空航天局(NASA)对未来望远镜的要求,新的红外空间天文台将在哈勃太空望远镜使用寿命结束后取代其。作为HST的继任者,詹姆斯韦伯太空望远镜(JWST),以前被称为下一代太空望远镜(NGST),需要一个更大的聚光主镜,能够探测来自第一个十亿年的微弱信号,即星系形成的时期。JWST将能够检测波长在0.6至20毫米范围内的辐射。此外,JWST必须能够看到比目前使用大型地面红外望远镜研究的物体暗400倍的物体。
由于与当前运载火箭相关的尺寸和重量限制,未来的任务,如JWST,将使用分段反射器,而不是由单块玻璃铸造的整体反射器。尽管多镜设计具有许多优点,但该技术存在许多主要困难。由于干扰,镜子很容易错位。因此,需要控制器来维护镜面形状。集成这种先进光学系统的另一个挑战是对望远镜指向的严格要求。
开发了一种光线追踪算法,为SPACE试验台外围指向架构的设计和构建提供了便利。本文将介绍LabVIEW中的光线追踪仿真,该仿真支持开发如此复杂的复杂系统的精确指向架构。
SPACE测试台模拟了焦距为2.4米的卡塞格林望远镜,其性能可与实际的星载系统相媲美。该系统的顶级要求包括将主镜的图形保持在相对于主镜标称形状的1微米RMS畸变以内,以及精度为2弧秒的精确指向。
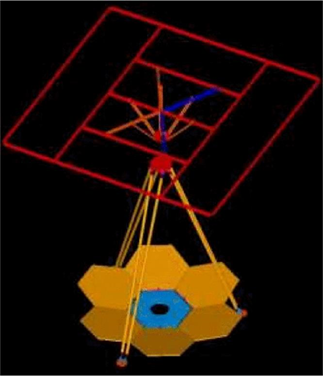
SPACE试验台由主镜、副镜和轻质柔性桁架结构组成。主镜(安装在支撑桁架上)由七个六角形面板组成,每个面板直径101厘米。六个外围面板由18个线性电磁致动器(每个有源面板3个执行器)在三个自由度内主动控制,第七个面板用作参考。此外,一组18个边缘传感器用于测量面板的相对位移和角度。测试台的活动副镜是一个六面锥形镜,用于将光从主镜反射到中心平面,并通过三脚架连接到主镜。整个测试台由铝蜂窝芯制成的三角形隔离平台支撑,顶部和底部带有不锈钢表皮。
太空望远镜测试台需要执行精确指向,同时保持主镜的抛物线形状。为了实现精确到2弧秒的测试台的指向控制,设计了一个外围指向架构(PPA),通过模拟来自远处物体的光线来物理演示望远镜指向。
PPA使用六个激光器的组件来模拟研究对象。每个激光器对应于其独立的面板和光学检测器。激光组件位于电动尖端/倾斜平台上,激光源与平台的旋转点或万向节点重合。
由于激光源位于平台的旋转点上,因此源没有平移或位移。当电动平台倾斜或倾斜时,光源是静止的,而只有激光束方向受到影响。
使用从平台旋转点到每个执行器的距离,(一个x和一个y对于每个轴上的致动器,)和执行器位移,计算出平台移动一个角度θ从其在y轴上的零位置开始。平台的法线矢量也移动相同的角度θ从正z轴。
每个激光器固定在距离平台法线(正z轴)22.84°的位置,因此可以根据电动平台移动后的法向矢量方向计算每个激光器的方向和角度。
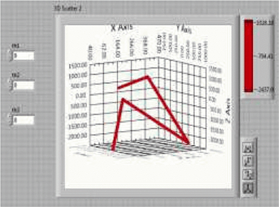
Matlab程序是为称为射线1到射线6的每个单独光束开发的。MathScriptNode用于将Matlab代码转换为LabVIEW。例如,Ray2的LabView框图的一部分如图9所示。Ray2的LabView前面板的结果图如图10所示。
为了成功实现SPACE测试台的整形和指向控制,必须集成所有涉及的组件。目前,Test台整形控制是使用DSP执行,DSP通过A/D转换器接收来自传感器的信号,执行必要的控制算法,并通过数模变器和放大器将信号发送到主镜执行器。在单独的循环中,PPA由ESP运动控制器驱动。目前,这种远程通信是通过通信协议实现的,用于在计算机和ESP之间发送和接收命令和数据。为了结合整形和指向控制,必须直接从控制结构整形的数字信号处理器向ESP发送命令。这将允许完全集成SPACE测试台的整形和指向控制。
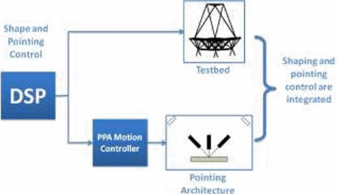
然后这些信号通过D/A通道发送,并由LabVIEW使用。将创建一个LabviewGUI,从DSP的输出信号向ESP模块发送适当的ASCII命令。
这是LabVIEW的一个简单应用,更多的开发案例,欢迎登录北京瀚文网星官网,了解更多信息。
![Gitlab升级报错二:rails_migration[gitlab-rails] (gitlab::database_migrations line 51)](https://img-blog.csdnimg.cn/img_convert/3dc58259223a27ed5c32af678f3f881c.png)