文章目录
- 一、概述
- 二、函数调用结构图
- 三、Libswscale处理数据流程
- 四、重要结构体
- 4.1、SwsContext
- 4.2、SwsFilter
- 五、重要函数
- 5.1、sws_getContext
- 5.1.1、sws_alloc_context
- 5.1.2、sws_init_context
- 5.2、sws_scale
- 5.2.1、SwsContext中的swscale()
- 5.2.2、check_image_pointers
- 5.2.3、usePal
- 5.3、sws_freeContext
- 六、实例
团队博客: 汽车电子社区
一、概述
Libswscale里面实现了各种图像像素格式的转换,例如YUV与RGB之间的转换;以及图像大小缩放(例如640x360拉伸为1280x720)功能。而且libswscale还做了相应指令集的优化,因此它的转换效率比自己写的C语言的转换效率高很多。
libswscale常用的函数数量很少,一般情况下就3个:
sws_getContext():初始化一个SwsContext。
sws_scale():处理图像数据。
sws_freeContext():释放一个SwsContext。
其中sws_getContext()也可以用sws_getCachedContext()取代。
尽管libswscale从表面上看常用函数的个数不多,它的内部却有一个大大的“世界”。做为一个几乎“万能”的图片像素数据处理类库,它的内部包含了大量的代码。因此计划写两篇文章分析它的源代码。本文首先分析它的初始化函数sws_getContext(),而下一篇文章则分析它的数据处理函数sws_scale()。
二、函数调用结构图
分析得到的libswscale的函数调用关系如下图所示。

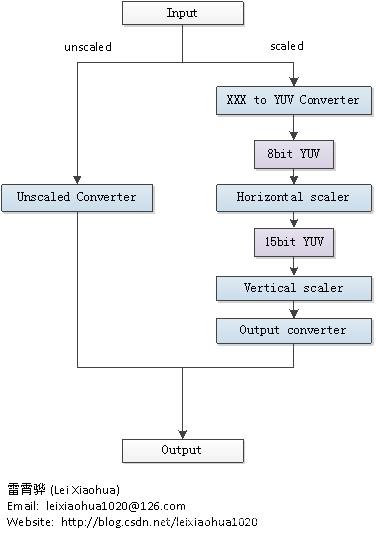
三、Libswscale处理数据流程
Libswscale处理像素数据的流程可以概括为下图:
四、重要结构体
4.1、SwsContext
SwsContext是使用libswscale时候一个贯穿始终的结构体。但是我们在使用FFmpeg的类库进行开发的时候,是无法看到它的内部结构的。在libswscale\swscale.h中只能看到一行定义:
typedef struct SwsContext {/*** info on struct for av_log*/const AVClass *av_class;struct SwsContext *parent;AVSliceThread *slicethread;struct SwsContext **slice_ctx;int *slice_err;int nb_slice_ctx;// values passed to current sws_receive_slice() callint dst_slice_start;int dst_slice_height;/*** Note that src, dst, srcStride, dstStride will be copied in the* sws_scale() wrapper so they can be freely modified here.*/SwsFunc convert_unscaled;int srcW; ///< Width of source luma/alpha planes.int srcH; ///< Height of source luma/alpha planes.int dstH; ///< Height of destination luma/alpha planes.int chrSrcW; ///< Width of source chroma planes.int chrSrcH; ///< Height of source chroma planes.int chrDstW; ///< Width of destination chroma planes.int chrDstH; ///< Height of destination chroma planes.int lumXInc, chrXInc;int lumYInc, chrYInc;enum AVPixelFormat dstFormat; ///< Destination pixel format.enum AVPixelFormat srcFormat; ///< Source pixel format.int dstFormatBpp; ///< Number of bits per pixel of the destination pixel format.int srcFormatBpp; ///< Number of bits per pixel of the source pixel format.int dstBpc, srcBpc;int chrSrcHSubSample; ///< Binary logarithm of horizontal subsampling factor between luma/alpha and chroma planes in source image.int chrSrcVSubSample; ///< Binary logarithm of vertical subsampling factor between luma/alpha and chroma planes in source image.int chrDstHSubSample; ///< Binary logarithm of horizontal subsampling factor between luma/alpha and chroma planes in destination image.int chrDstVSubSample; ///< Binary logarithm of vertical subsampling factor between luma/alpha and chroma planes in destination image.int vChrDrop; ///< Binary logarithm of extra vertical subsampling factor in source image chroma planes specified by user.int sliceDir; ///< Direction that slices are fed to the scaler (1 = top-to-bottom, -1 = bottom-to-top).int nb_threads; ///< Number of threads used for scalingdouble param[2]; ///< Input parameters for scaling algorithms that need them.AVFrame *frame_src;AVFrame *frame_dst;RangeList src_ranges;/* The cascaded_* fields allow spliting a scaler task into multiple* sequential steps, this is for example used to limit the maximum* downscaling factor that needs to be supported in one scaler.*/struct SwsContext *cascaded_context[3];int cascaded_tmpStride[4];uint8_t *cascaded_tmp[4];int cascaded1_tmpStride[4];uint8_t *cascaded1_tmp[4];int cascaded_mainindex;double gamma_value;int gamma_flag;int is_internal_gamma;uint16_t *gamma;uint16_t *inv_gamma;int numDesc;int descIndex[2];int numSlice;struct SwsSlice *slice;struct SwsFilterDescriptor *desc;uint32_t pal_yuv[256];uint32_t pal_rgb[256];float uint2float_lut[256];/*** @name Scaled horizontal lines ring buffer.* The horizontal scaler keeps just enough scaled lines in a ring buffer* so they may be passed to the vertical scaler. The pointers to the* allocated buffers for each line are duplicated in sequence in the ring* buffer to simplify indexing and avoid wrapping around between lines* inside the vertical scaler code. The wrapping is done before the* vertical scaler is called.*///@{int lastInLumBuf; ///< Last scaled horizontal luma/alpha line from source in the ring buffer.int lastInChrBuf; ///< Last scaled horizontal chroma line from source in the ring buffer.//@}uint8_t *formatConvBuffer;int needAlpha;/*** @name Horizontal and vertical filters.* To better understand the following fields, here is a pseudo-code of* their usage in filtering a horizontal line:* @code* for (i = 0; i < width; i++) {* dst[i] = 0;* for (j = 0; j < filterSize; j++)* dst[i] += src[ filterPos[i] + j ] * filter[ filterSize * i + j ];* dst[i] >>= FRAC_BITS; // The actual implementation is fixed-point.* }* @endcode*///@{int16_t *hLumFilter; ///< Array of horizontal filter coefficients for luma/alpha planes.int16_t *hChrFilter; ///< Array of horizontal filter coefficients for chroma planes.int16_t *vLumFilter; ///< Array of vertical filter coefficients for luma/alpha planes.int16_t *vChrFilter; ///< Array of vertical filter coefficients for chroma planes.int32_t *hLumFilterPos; ///< Array of horizontal filter starting positions for each dst[i] for luma/alpha planes.int32_t *hChrFilterPos; ///< Array of horizontal filter starting positions for each dst[i] for chroma planes.int32_t *vLumFilterPos; ///< Array of vertical filter starting positions for each dst[i] for luma/alpha planes.int32_t *vChrFilterPos; ///< Array of vertical filter starting positions for each dst[i] for chroma planes.int hLumFilterSize; ///< Horizontal filter size for luma/alpha pixels.int hChrFilterSize; ///< Horizontal filter size for chroma pixels.int vLumFilterSize; ///< Vertical filter size for luma/alpha pixels.int vChrFilterSize; ///< Vertical filter size for chroma pixels.//@}int lumMmxextFilterCodeSize; ///< Runtime-generated MMXEXT horizontal fast bilinear scaler code size for luma/alpha planes.int chrMmxextFilterCodeSize; ///< Runtime-generated MMXEXT horizontal fast bilinear scaler code size for chroma planes.uint8_t *lumMmxextFilterCode; ///< Runtime-generated MMXEXT horizontal fast bilinear scaler code for luma/alpha planes.uint8_t *chrMmxextFilterCode; ///< Runtime-generated MMXEXT horizontal fast bilinear scaler code for chroma planes.int canMMXEXTBeUsed;int warned_unuseable_bilinear;int dstY; ///< Last destination vertical line output from last slice.int flags; ///< Flags passed by the user to select scaler algorithm, optimizations, subsampling, etc...void *yuvTable; // pointer to the yuv->rgb table start so it can be freed()// alignment ensures the offset can be added in a single// instruction on e.g. ARMDECLARE_ALIGNED(16, int, table_gV)[256 + 2*YUVRGB_TABLE_HEADROOM];uint8_t *table_rV[256 + 2*YUVRGB_TABLE_HEADROOM];uint8_t *table_gU[256 + 2*YUVRGB_TABLE_HEADROOM];uint8_t *table_bU[256 + 2*YUVRGB_TABLE_HEADROOM];DECLARE_ALIGNED(16, int32_t, input_rgb2yuv_table)[16+40*4]; // This table can contain both C and SIMD formatted values, the C vales are always at the XY_IDX points
#define RY_IDX 0
#define GY_IDX 1
#define BY_IDX 2
#define RU_IDX 3
#define GU_IDX 4
#define BU_IDX 5
#define RV_IDX 6
#define GV_IDX 7
#define BV_IDX 8
#define RGB2YUV_SHIFT 15int *dither_error[4];//Colorspace stuffint contrast, brightness, saturation; // for sws_getColorspaceDetailsint srcColorspaceTable[4];int dstColorspaceTable[4];int srcRange; ///< 0 = MPG YUV range, 1 = JPG YUV range (source image).int dstRange; ///< 0 = MPG YUV range, 1 = JPG YUV range (destination image).int src0Alpha;int dst0Alpha;int srcXYZ;int dstXYZ;int src_h_chr_pos;int dst_h_chr_pos;int src_v_chr_pos;int dst_v_chr_pos;int yuv2rgb_y_offset;int yuv2rgb_y_coeff;int yuv2rgb_v2r_coeff;int yuv2rgb_v2g_coeff;int yuv2rgb_u2g_coeff;int yuv2rgb_u2b_coeff;#define RED_DITHER "0*8"
#define GREEN_DITHER "1*8"
#define BLUE_DITHER "2*8"
#define Y_COEFF "3*8"
#define VR_COEFF "4*8"
#define UB_COEFF "5*8"
#define VG_COEFF "6*8"
#define UG_COEFF "7*8"
#define Y_OFFSET "8*8"
#define U_OFFSET "9*8"
#define V_OFFSET "10*8"
#define LUM_MMX_FILTER_OFFSET "11*8"
#define CHR_MMX_FILTER_OFFSET "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)
#define DSTW_OFFSET "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2"
#define ESP_OFFSET "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+8"
#define VROUNDER_OFFSET "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+16"
#define U_TEMP "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+24"
#define V_TEMP "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+32"
#define Y_TEMP "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+40"
#define ALP_MMX_FILTER_OFFSET "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*2+48"
#define UV_OFF_PX "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*3+48"
#define UV_OFF_BYTE "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*3+56"
#define DITHER16 "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*3+64"
#define DITHER32 "11*8+4*4*"AV_STRINGIFY(MAX_FILTER_SIZE)"*3+80"
#define DITHER32_INT (11*8+4*4*MAX_FILTER_SIZE*3+80) // value equal to above, used for checking that the struct hasn't been changed by mistakeDECLARE_ALIGNED(8, uint64_t, redDither);DECLARE_ALIGNED(8, uint64_t, greenDither);DECLARE_ALIGNED(8, uint64_t, blueDither);DECLARE_ALIGNED(8, uint64_t, yCoeff);DECLARE_ALIGNED(8, uint64_t, vrCoeff);DECLARE_ALIGNED(8, uint64_t, ubCoeff);DECLARE_ALIGNED(8, uint64_t, vgCoeff);DECLARE_ALIGNED(8, uint64_t, ugCoeff);DECLARE_ALIGNED(8, uint64_t, yOffset);DECLARE_ALIGNED(8, uint64_t, uOffset);DECLARE_ALIGNED(8, uint64_t, vOffset);int32_t lumMmxFilter[4 * MAX_FILTER_SIZE];int32_t chrMmxFilter[4 * MAX_FILTER_SIZE];int dstW; ///< Width of destination luma/alpha planes.DECLARE_ALIGNED(8, uint64_t, esp);DECLARE_ALIGNED(8, uint64_t, vRounder);DECLARE_ALIGNED(8, uint64_t, u_temp);DECLARE_ALIGNED(8, uint64_t, v_temp);DECLARE_ALIGNED(8, uint64_t, y_temp);int32_t alpMmxFilter[4 * MAX_FILTER_SIZE];// alignment of these values is not necessary, but merely here// to maintain the same offset across x8632 and x86-64. Once we// use proper offset macros in the asm, they can be removed.DECLARE_ALIGNED(8, ptrdiff_t, uv_off); ///< offset (in pixels) between u and v planesDECLARE_ALIGNED(8, ptrdiff_t, uv_offx2); ///< offset (in bytes) between u and v planesDECLARE_ALIGNED(8, uint16_t, dither16)[8];DECLARE_ALIGNED(8, uint32_t, dither32)[8];const uint8_t *chrDither8, *lumDither8;#if HAVE_ALTIVECvector signed short CY;vector signed short CRV;vector signed short CBU;vector signed short CGU;vector signed short CGV;vector signed short OY;vector unsigned short CSHIFT;vector signed short *vYCoeffsBank, *vCCoeffsBank;
#endifint use_mmx_vfilter;/* pre defined color-spaces gamma */
#define XYZ_GAMMA (2.6f)
#define RGB_GAMMA (2.2f)int16_t *xyzgamma;int16_t *rgbgamma;int16_t *xyzgammainv;int16_t *rgbgammainv;int16_t xyz2rgb_matrix[3][4];int16_t rgb2xyz_matrix[3][4];/* function pointers for swscale() */yuv2planar1_fn yuv2plane1;yuv2planarX_fn yuv2planeX;yuv2interleavedX_fn yuv2nv12cX;yuv2packed1_fn yuv2packed1;yuv2packed2_fn yuv2packed2;yuv2packedX_fn yuv2packedX;yuv2anyX_fn yuv2anyX;/// Opaque data pointer passed to all input functions.void *input_opaque;/// Unscaled conversion of luma plane to YV12 for horizontal scaler.void (*lumToYV12)(uint8_t *dst, const uint8_t *src, const uint8_t *src2, const uint8_t *src3,int width, uint32_t *pal, void *opq);/// Unscaled conversion of alpha plane to YV12 for horizontal scaler.void (*alpToYV12)(uint8_t *dst, const uint8_t *src, const uint8_t *src2, const uint8_t *src3,int width, uint32_t *pal, void *opq);/// Unscaled conversion of chroma planes to YV12 for horizontal scaler.void (*chrToYV12)(uint8_t *dstU, uint8_t *dstV,const uint8_t *src1, const uint8_t *src2, const uint8_t *src3,int width, uint32_t *pal, void *opq);/*** Functions to read planar input, such as planar RGB, and convert* internally to Y/UV/A.*//** @{ */void (*readLumPlanar)(uint8_t *dst, const uint8_t *src[4], int width, int32_t *rgb2yuv,void *opq);void (*readChrPlanar)(uint8_t *dstU, uint8_t *dstV, const uint8_t *src[4],int width, int32_t *rgb2yuv, void *opq);void (*readAlpPlanar)(uint8_t *dst, const uint8_t *src[4], int width, int32_t *rgb2yuv,void *opq);/** @} *//*** Scale one horizontal line of input data using a bilinear filter* to produce one line of output data. Compared to SwsContext->hScale(),* please take note of the following caveats when using these:* - Scaling is done using only 7 bits instead of 14-bit coefficients.* - You can use no more than 5 input pixels to produce 4 output* pixels. Therefore, this filter should not be used for downscaling* by more than ~20% in width (because that equals more than 5/4th* downscaling and thus more than 5 pixels input per 4 pixels output).* - In general, bilinear filters create artifacts during downscaling* (even when <20%), because one output pixel will span more than one* input pixel, and thus some pixels will need edges of both neighbor* pixels to interpolate the output pixel. Since you can use at most* two input pixels per output pixel in bilinear scaling, this is* impossible and thus downscaling by any size will create artifacts.* To enable this type of scaling, set SWS_FLAG_FAST_BILINEAR* in SwsContext->flags.*//** @{ */void (*hyscale_fast)(struct SwsContext *c,int16_t *dst, int dstWidth,const uint8_t *src, int srcW, int xInc);void (*hcscale_fast)(struct SwsContext *c,int16_t *dst1, int16_t *dst2, int dstWidth,const uint8_t *src1, const uint8_t *src2,int srcW, int xInc);/** @} *//*** Scale one horizontal line of input data using a filter over the input* lines, to produce one (differently sized) line of output data.** @param dst pointer to destination buffer for horizontally scaled* data. If the number of bits per component of one* destination pixel (SwsContext->dstBpc) is <= 10, data* will be 15 bpc in 16 bits (int16_t) width. Else (i.e.* SwsContext->dstBpc == 16), data will be 19bpc in* 32 bits (int32_t) width.* @param dstW width of destination image* @param src pointer to source data to be scaled. If the number of* bits per component of a source pixel (SwsContext->srcBpc)* is 8, this is 8bpc in 8 bits (uint8_t) width. Else* (i.e. SwsContext->dstBpc > 8), this is native depth* in 16 bits (uint16_t) width. In other words, for 9-bit* YUV input, this is 9bpc, for 10-bit YUV input, this is* 10bpc, and for 16-bit RGB or YUV, this is 16bpc.* @param filter filter coefficients to be used per output pixel for* scaling. This contains 14bpp filtering coefficients.* Guaranteed to contain dstW * filterSize entries.* @param filterPos position of the first input pixel to be used for* each output pixel during scaling. Guaranteed to* contain dstW entries.* @param filterSize the number of input coefficients to be used (and* thus the number of input pixels to be used) for* creating a single output pixel. Is aligned to 4* (and input coefficients thus padded with zeroes)* to simplify creating SIMD code.*//** @{ */void (*hyScale)(struct SwsContext *c, int16_t *dst, int dstW,const uint8_t *src, const int16_t *filter,const int32_t *filterPos, int filterSize);void (*hcScale)(struct SwsContext *c, int16_t *dst, int dstW,const uint8_t *src, const int16_t *filter,const int32_t *filterPos, int filterSize);/** @} *//// Color range conversion function for luma plane if needed.void (*lumConvertRange)(int16_t *dst, int width);/// Color range conversion function for chroma planes if needed.void (*chrConvertRange)(int16_t *dst1, int16_t *dst2, int width);int needs_hcscale; ///< Set if there are chroma planes to be converted.SwsDither dither;SwsAlphaBlend alphablend;// scratch buffer for converting packed rgb0 sources// filled with a copy of the input frame + fully opaque alpha,// then passed as input to further conversionuint8_t *rgb0_scratch;unsigned int rgb0_scratch_allocated;// scratch buffer for converting XYZ sources// filled with the input converted to rgb48// then passed as input to further conversionuint8_t *xyz_scratch;unsigned int xyz_scratch_allocated;unsigned int dst_slice_align;atomic_int stride_unaligned_warned;atomic_int data_unaligned_warned;Half2FloatTables *h2f_tables;
} SwsContext;
这个结构体的定义确实比较复杂,里面包含了libswscale所需要的全部变量。一一分析这些变量是不太现实的,在后文中会简单分析其中的几个变量。
swscale这个变量的类型是SwsFunc,实际上就是一个函数指针。它是整个类库的核心。当我们从外部调用swscale()函数的时候。实际上就是调用了SwsContext中的这个名称为swscale的变量(注意外部函数接口和这个内部函数指针的名字是一样的,但不是一回事)。
4.2、SwsFilter
typedef struct SwsVector {double *coeff; /* 滤波器系数 */int length; /* 滤波器长度 */
} SwsVector;// vectors can be shared
typedef struct SwsFilter {SwsVector *lumH; /* 亮度水平处理 */SwsVector *lumV; /* 亮度垂直处理 */SwsVector *chrH; /* 色度水平处理 */SwsVector *chrV; /* 色度垂直处理 */
} SwsFilter;
五、重要函数
5.1、sws_getContext
SwsContext *sws_getContext(int srcW, int srcH, enum AVPixelFormat srcFormat,int dstW, int dstH, enum AVPixelFormat dstFormat,int flags, SwsFilter *srcFilter,SwsFilter *dstFilter, const double *param)
{SwsContext *c;c = sws_alloc_set_opts(srcW, srcH, srcFormat,dstW, dstH, dstFormat,flags, param);if (!c)return NULL;if (sws_init_context(c, srcFilter, dstFilter) < 0) {sws_freeContext(c);return NULL;}return c;
}
该函数包含以下参数:
1. srcW:源图像的宽。
2. srcH:源图像的高。
3. srcFormat:源图像的像素格式。
4. dstW:目标图像的宽。
5. dstH:目标图像的高。
6. dstFormat:目标图像的像素格式。
7. flags:设定图像拉伸使用的算法 。
成功执行的话返回生成的SwsContext,否则返回NULL。
从sws_getContext()的定义中可以看出,它首先调用了一个函数sws_alloc_context()用于给SwsContext分配内存。然后将传入的源图像,目标图像的宽高,像素格式,以及标志位分别赋值给该SwsContext相应的字段。最后调用一个函数sws_init_context()完成初始化工作。下面我们分别看一下sws_alloc_context()和sws_init_context()这两个函数。
5.1.1、sws_alloc_context
sws_alloc_context()是FFmpeg的一个API,用于给SwsContext分配内存,它的具体实现如下所示。
SwsContext *sws_alloc_context(void)
{SwsContext *c = av_mallocz(sizeof(SwsContext));av_assert0(offsetof(SwsContext, redDither) + DITHER32_INT == offsetof(SwsContext, dither32));if (c) {c->av_class = &ff_sws_context_class;av_opt_set_defaults(c);atomic_init(&c->stride_unaligned_warned, 0);atomic_init(&c->data_unaligned_warned, 0);}return c;
}
从代码中可以看出,sws_alloc_context()首先调用av_mallocz()为SwsContext结构体分配了一块内存;然后设置了该结构体的AVClass,并且给该结构体的字段设置了默认值。
5.1.2、sws_init_context
av_cold int sws_init_context(SwsContext *c, SwsFilter *srcFilter,SwsFilter *dstFilter)
{static AVOnce rgb2rgb_once = AV_ONCE_INIT;enum AVPixelFormat src_format, dst_format;int ret;c->frame_src = av_frame_alloc();c->frame_dst = av_frame_alloc();if (!c->frame_src || !c->frame_dst)return AVERROR(ENOMEM);if (ff_thread_once(&rgb2rgb_once, ff_sws_rgb2rgb_init) != 0)return AVERROR_UNKNOWN;src_format = c->srcFormat;dst_format = c->dstFormat;c->srcRange |= handle_jpeg(&c->srcFormat);c->dstRange |= handle_jpeg(&c->dstFormat);if (src_format != c->srcFormat || dst_format != c->dstFormat)av_log(c, AV_LOG_WARNING, "deprecated pixel format used, make sure you did set range correctly\n");if (c->nb_threads != 1) {ret = context_init_threaded(c, srcFilter, dstFilter);if (ret < 0 || c->nb_threads > 1)return ret;// threading disabled in this build, init as single-threaded}return sws_init_single_context(c, srcFilter, dstFilter);
}
sws_init_context()除了对SwsContext中的各种变量进行赋值之外,主要按照顺序完成了以下一些工作:
1. 通过sws_rgb2rgb_init()初始化RGB转RGB(或者YUV转YUV)的函数(注意不包含RGB与YUV相互转换的函数)。
2. 通过判断输入输出图像的宽高来判断图像是否需要拉伸。如果图像需要拉伸,那么unscaled变量会被标记为1。
3. 通过sws_setColorspaceDetails()初始化颜色空间。
4. 一些输入参数的检测。例如:如果没有设置图像拉伸方法的话,默认设置为SWS_BICUBIC;如果输入和输出图像的宽高小于等于0的话,也会返回错误信息。
5. 初始化Filter。这一步根据拉伸方法的不同,初始化不同的Filter。
6. 如果flags中设置了“打印信息”选项SWS_PRINT_INFO,则输出信息。
7. 如果不需要拉伸的话,调用ff_get_unscaled_swscale()将特定的像素转换函数的指针赋值给SwsContext中的swscale指针。
8. 如果需要拉伸的话,调用ff_getSwsFunc()将通用的swscale()赋值给SwsContext中的swscale指针(这个地方有点绕,但是确实是这样的)。
5.2、sws_scale
sws_scale()是用于转换像素的函数。它的声明位于libswscale\swscale.h,如下所示。
int attribute_align_arg sws_scale(struct SwsContext *c,const uint8_t * const srcSlice[],const int srcStride[], int srcSliceY,int srcSliceH, uint8_t *const dst[],const int dstStride[])
{if (c->nb_slice_ctx)c = c->slice_ctx[0];return scale_internal(c, srcSlice, srcStride, srcSliceY, srcSliceH,dst, dstStride, 0, c->dstH);
}void ff_sws_slice_worker(void *priv, int jobnr, int threadnr,int nb_jobs, int nb_threads)
{SwsContext *parent = priv;SwsContext *c = parent->slice_ctx[threadnr];const int slice_height = FFALIGN(FFMAX((parent->dst_slice_height + nb_jobs - 1) / nb_jobs, 1),c->dst_slice_align);const int slice_start = jobnr * slice_height;const int slice_end = FFMIN((jobnr + 1) * slice_height, parent->dst_slice_height);int err = 0;if (slice_end > slice_start) {uint8_t *dst[4] = { NULL };for (int i = 0; i < FF_ARRAY_ELEMS(dst) && parent->frame_dst->data[i]; i++) {const int vshift = (i == 1 || i == 2) ? c->chrDstVSubSample : 0;const ptrdiff_t offset = parent->frame_dst->linesize[i] *((slice_start + parent->dst_slice_start) >> vshift);dst[i] = parent->frame_dst->data[i] + offset;}err = scale_internal(c, (const uint8_t * const *)parent->frame_src->data,parent->frame_src->linesize, 0, c->srcH,dst, parent->frame_dst->linesize,parent->dst_slice_start + slice_start, slice_end - slice_start);}parent->slice_err[threadnr] = err;
}
参数说明:
1. SwsContext *c:转换格式的上下文结构体,也就是 sws_getContext() 函数返回的结果。
2. srcSlice[]:源图像的每个颜色通道的数据指针。其实就是解码后的 AVFrame 中的 data[] 数组。因为不同像素的存储格式不同,所以 srcSlice[] 数组也有可能不同。
3. srcStride[]:源图像的每个颜色通道的跨度。也就是每个通道的行字节数,对应的是解码后的 AVFrame 中的 linesize[] 数组,根据它可以确立下一行的起始位置。
4. srcSliceY、int srcSliceH:定义在源图像上处理区域,srcSliceY 是起始位置,srcSliceH 是处理多少行。如果 srcSliceY=0,srcSliceH=height,表示一次性处理完整个图像。这种设置是为了多线程并行,例如可以创建两个线程,第一个线程处理 [0, h/2-1] 行,第二个线程处理 [h/2, h-1] 行,并行处理加快速度。
5. dst[]、dstStride[]:定义目标图像信息(目标图像输出的每个颜色通道数据指针,每个颜色通道行字节数)。
从sws_scale()的定义可以看出,它封装了SwsContext中的swscale()(注意这个函数中间没有“_”)。函数最重要的一句代码就是“c->swscale()”。除此之外,函数还做了一些增加“兼容性”的一些处理。函数的主要步骤如下所示。
1. 检查输入的图像參数的合理性。
2. 假设输入像素数据中使用了“调色板”(palette),则进行一些对应的处理。这一步通过函数usePal()来判定。
3. 其他一些特殊格式的处理,比方说Alpha。XYZ等的处理(这方面没有研究过)。
4. 假设输入的图像的扫描方式是从底部到顶部的(普通情况下是从顶部究竟部)。则将图像进行反转。
5. 调用SwsContext中的swscale()。
5.2.1、SwsContext中的swscale()
swscale这个变量的类型是SwsFunc,实际上就是一个函数指针。它是整个类库的核心。当我们从外部调用swscale()函数的时候。实际上就是调用了SwsContext中的这个名称为swscale的变量(注意外部函数接口和这个内部函数指针的名字是一样的,但不是一回事)。
能够看一下SwsFunc这个类型的定义:
typedef int (*SwsFunc)(struct SwsContext *context, const uint8_t *src[],int srcStride[], int srcSliceY, int srcSliceH,uint8_t *dst[], int dstStride[]);
能够看出SwsFunc的定义的參数类型和libswscale类库外部接口函数swscale()的參数类型一模一样。
在libswscale中,该指针的指向能够分成2种情况:
1. 图像没有伸缩的时候。指向专有的像素转换函数。
2. 图像有伸缩的时候。指向swscale()函数。
在调用sws_getContext()初始化SwsContext的时候。会在其子函数sws_init_context()中对swscale指针进行赋值。假设图像没有进行拉伸,则会调用ff_get_unscaled_swscale()对其进行赋值;假设图像进行了拉伸。则会调用ff_getSwsFunc()对其进行赋值。
5.2.2、check_image_pointers
check_image_pointers()检查输入输出图像的内存是否正确分配。check_image_pointers()的定义例如以下所看到的
static int check_image_pointers(const uint8_t * const data[4], enum AVPixelFormat pix_fmt,const int linesizes[4])
{const AVPixFmtDescriptor *desc = av_pix_fmt_desc_get(pix_fmt);int i;av_assert2(desc);for (i = 0; i < 4; i++) {int plane = desc->comp[i].plane;if (!data[plane] || !linesizes[plane])return 0;}return 1;
}
5.2.3、usePal
static av_always_inline int usePal(enum AVPixelFormat pix_fmt)
{switch (pix_fmt) {case AV_PIX_FMT_PAL8:case AV_PIX_FMT_BGR4_BYTE:case AV_PIX_FMT_BGR8:case AV_PIX_FMT_GRAY8:case AV_PIX_FMT_RGB4_BYTE:case AV_PIX_FMT_RGB8:return 1;default:return 0;}
}
从定义能够看出该函数通过判定AVPixFmtDescriptor中的flag是否包括AV_PIX_FMT_FLAG_PAL来断定像素格式是否使用了“调色板”。
5.3、sws_freeContext
sws_scale() 函数主要是用来做视频像素格式和分辨率的转换,其优势在于:可以在同一个函数里实现:
1.图像色彩空间转换,
2.分辨率缩放,
3.前后图像滤波处理。
不足之处在于:
效率相对较低,不如 libyuv 或 shader,其关联的函数就是上面的sws_getContext() 和 sws_freeContext()。
它的声明位于 libswscale\swscale.h,如下所示:
void sws_freeContext(SwsContext *c)
{int i;if (!c)return;for (i = 0; i < c->nb_slice_ctx; i++)sws_freeContext(c->slice_ctx[i]);av_freep(&c->slice_ctx);av_freep(&c->slice_err);avpriv_slicethread_free(&c->slicethread);for (i = 0; i < 4; i++)av_freep(&c->dither_error[i]);av_frame_free(&c->frame_src);av_frame_free(&c->frame_dst);av_freep(&c->src_ranges.ranges);av_freep(&c->vLumFilter);av_freep(&c->vChrFilter);av_freep(&c->hLumFilter);av_freep(&c->hChrFilter);
#if HAVE_ALTIVECav_freep(&c->vYCoeffsBank);av_freep(&c->vCCoeffsBank);
#endifav_freep(&c->vLumFilterPos);av_freep(&c->vChrFilterPos);av_freep(&c->hLumFilterPos);av_freep(&c->hChrFilterPos);#if HAVE_MMX_INLINE
#if USE_MMAPif (c->lumMmxextFilterCode)munmap(c->lumMmxextFilterCode, c->lumMmxextFilterCodeSize);if (c->chrMmxextFilterCode)munmap(c->chrMmxextFilterCode, c->chrMmxextFilterCodeSize);
#elif HAVE_VIRTUALALLOCif (c->lumMmxextFilterCode)VirtualFree(c->lumMmxextFilterCode, 0, MEM_RELEASE);if (c->chrMmxextFilterCode)VirtualFree(c->chrMmxextFilterCode, 0, MEM_RELEASE);
#elseav_free(c->lumMmxextFilterCode);av_free(c->chrMmxextFilterCode);
#endifc->lumMmxextFilterCode = NULL;c->chrMmxextFilterCode = NULL;
#endif /* HAVE_MMX_INLINE */av_freep(&c->yuvTable);av_freep(&c->formatConvBuffer);sws_freeContext(c->cascaded_context[0]);sws_freeContext(c->cascaded_context[1]);sws_freeContext(c->cascaded_context[2]);memset(c->cascaded_context, 0, sizeof(c->cascaded_context));av_freep(&c->cascaded_tmp[0]);av_freep(&c->cascaded1_tmp[0]);av_freep(&c->gamma);av_freep(&c->inv_gamma);av_freep(&c->rgb0_scratch);av_freep(&c->xyz_scratch);ff_free_filters(c);av_free(c);
}
六、实例
/*
* 需设定 SRCFILE 及 DSTFILE, 长宽等咨询
* 需 link libswscale
* 主要有三个 function
* sws_getContext() 是 initial 用, sws_freeContext() 是结束用
* sws_scale() 是主要运作的 function
*预设只会转换第一张 YUV, 如果要转换整个文档, 可以把 Decoding loop 的注解拿掉
*/ #include "libswscale/swscale.h" #define SRCFILE "foreman_cif.yuv"
#define DSTFILE "out.yuv" int main()
{ // 设定原始 YUV 的长宽 const int in_width = 352; const int in_height = 288; // 设定目的 YUV 的长宽const int out_width = 640; const int out_height = 480; const int read_size = in_width * in_height * 3 / 2; const int write_size = out_width * out_height * 3 / 2; struct SwsContext *img_convert_ctx; uint8_t *inbuf[4]; uint8_t *outbuf[4]; int inlinesize[4] = {in_width, in_width/2, in_width/2, 0}; int outlinesize[4] = {out_width, out_width/2, out_width/2, 0}; uint8_t in[352*288*3>>1]; uint8_t out[640*480*3>>1]; FILE *fin = fopen(SRCFILE, "rb"); FILE *fout = fopen(DSTFILE, "wb"); if(fin == NULL) { printf("open input file %s error.\n", SRCFILE); return -1; } if(fout == NULL) { printf("open output file %s error.\n", DSTFILE); return -1; } inbuf[0] = malloc(in_width*in_height); inbuf[1] = malloc(in_width*in_height>>2); inbuf[2] = malloc(in_width*in_height>>2); inbuf[3] = NULL; outbuf[0] = malloc(out_width*out_height); outbuf[1] = malloc(out_width*out_height>>2); outbuf[2] = malloc(out_width*out_height>>2); outbuf[3] = NULL; // ********* Initialize software scaling ********* // ********* sws_getContext ********************** img_convert_ctx = sws_getContext(in_width, in_height, PIX_FMT_YUV420P, out_width, out_height, PIX_FMT_YUV420P, SWS_POINT, NULL, NULL, NULL); if(img_convert_ctx == NULL) { fprintf(stderr, "Cannot initialize the conversion context!\n"); return -1; } fread(in, 1, read_size, fin); memcpy(inbuf[0], in, in_width*in_height); memcpy(inbuf[1], in+in_width*in_height, in_width*in_height>>2); memcpy(inbuf[2], in+(in_width*in_height*5>>2), in_width*in_height>>2); // ********* 主要的 function ****** // ********* sws_scale ************ sws_scale(img_convert_ctx, inbuf, inlinesize, 0, in_height, outbuf, outlinesize); memcpy(out, outbuf[0], out_width*out_height); memcpy(out+out_width*out_height, outbuf[1], out_width*out_height>>2); memcpy(out+(out_width*out_height*5>>2), outbuf[2], out_width*out_height>>2); fwrite(out, 1, write_size, fout); // ********* 结束的 function ******* // ********* sws_freeContext ******* sws_freeContext(img_convert_ctx); fclose(fin); fclose(fout); return 0;
} 

![[LitCTF 2023] Web类题目分享](https://img-blog.csdnimg.cn/63c8102ec0eb4436aefca864ebf914da.png)