一、单片机与PC机串行通信的设计
工业现场的测控系统中,常使用单片机进行监测点的数据采集,然后单片机通过串口与PC通信,把采集的数据串行传送到PC机上,再在PC机上进行数据处理。
PC机配置的都是RS-232标准串口,为D型9针插座,输入/输出为RS-232电平。D型9针插头引脚如下:
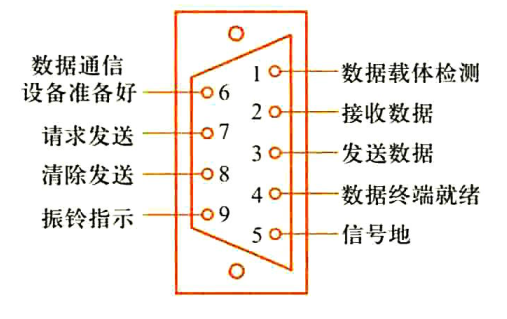
如下表为RS-232C的D型9针插头的引脚定义。
| 引脚号 | 功能 | 符号 | 方向 |
|---|---|---|---|
| 1 | 数据暂替检测 | DCD | 输入 |
| 2 | 接收数据 | RXD | 输入 |
| 3 | 发送数据 | TXD | 输出 |
| 4 | 数据终端就绪 | DTR | 输出 |
| 5 | 信号地 | GND | |
| 6 | 数据通信设备准备好 | DSR | 输入 |
| 7 | 请求发送 | RTS | 输出 |
| 8 | 清除发送 | CTS | 输入 |
| 9 | 振铃指示 | RI | 输入 |
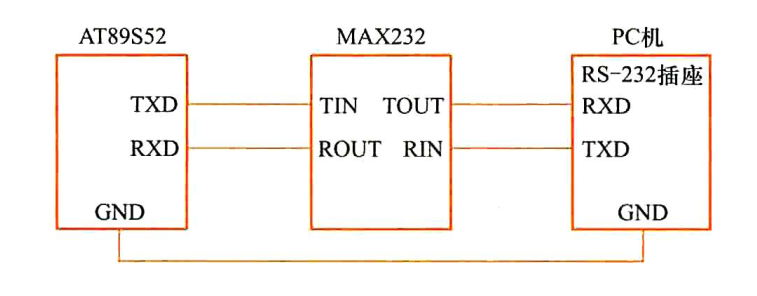
由于两者电平不匹配,因此必须把单片机输出的TTL电平转换为RS-232电平。
单片机与PC的接口如下图所示。图中的转换芯片为MAX232,接口连接只用了3条线,即RS-232插座中的2引脚、3引脚与5引脚。
二、单片机向PC发送数据示例
要求单片机通过串行口的TXD引脚向PC机串行发送8个数据字节。在proteus中使用两个串行口虚拟终端观察串行口线上出现的串行传输数据。
两个虚拟终端窗口为VT1和VT2,其中窗口VT1显示的数据表示单片机串口发送给PC机的数据,窗口VT2显示的数据表示由PC机经RS-232串口模型COMPIM接收到的数据,由于使用了串口模型COMPIM,从而省去了PC机的模型。
proteus仿真原理图如下:
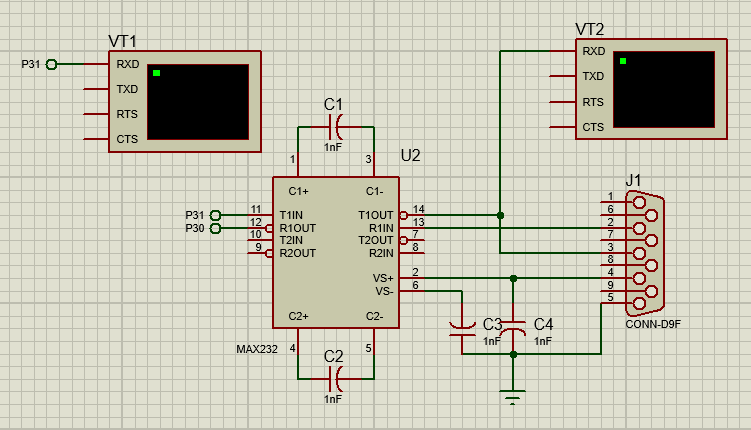
需要注意要设置虚拟终端的波特率与代码中设置的波特率保持一致。经过MAX232转换后电平是相反的,设置VT2属性中的【RX/TX Polarity】为【Inverted】。
软件设计,首先初始化串口通信,设置串口工作方式1,定时器工作方式2,波特率9600bps,波特率不加倍,代码如下:
void UsartInit()
{SCON=0x40; // 设置串口工作方式1TMOD=0x20; // 设置定时器T1工作方式2TH1=TL1=0xFD; // 设置波特率为9600bps,波特率不倍增PCON=0x00;EA=1;TR1=1;
}
发送数据功能单独编写一个函数,如下:
void send(u8 dat)
{SBUF=dat; // 将待发送数据写入发送缓冲器SBUFwhile(!TI); // 等待串行口发送完毕_nop_(); // 空操作TI=0; // 1个字节发送完成,清零TI
}
主函数中首先调用串口通信初始化函数,然后调用发送数据函数,调用8次后,如果不想再次发送数据进入while(1)循环。如下:
void main()
{u8 i;UsartInit(); // 串口通信初始化for(i=0;i<8;i++){send(sendBytes[i]); // 发送数据delay(); // 每次发送完数据延时200ms}while(1);
}
其中sendBytes定义如下:
// 单片机发送给PC机的数据
u8 code sendBytes[]="12345678";
proteus仿真结果如下:
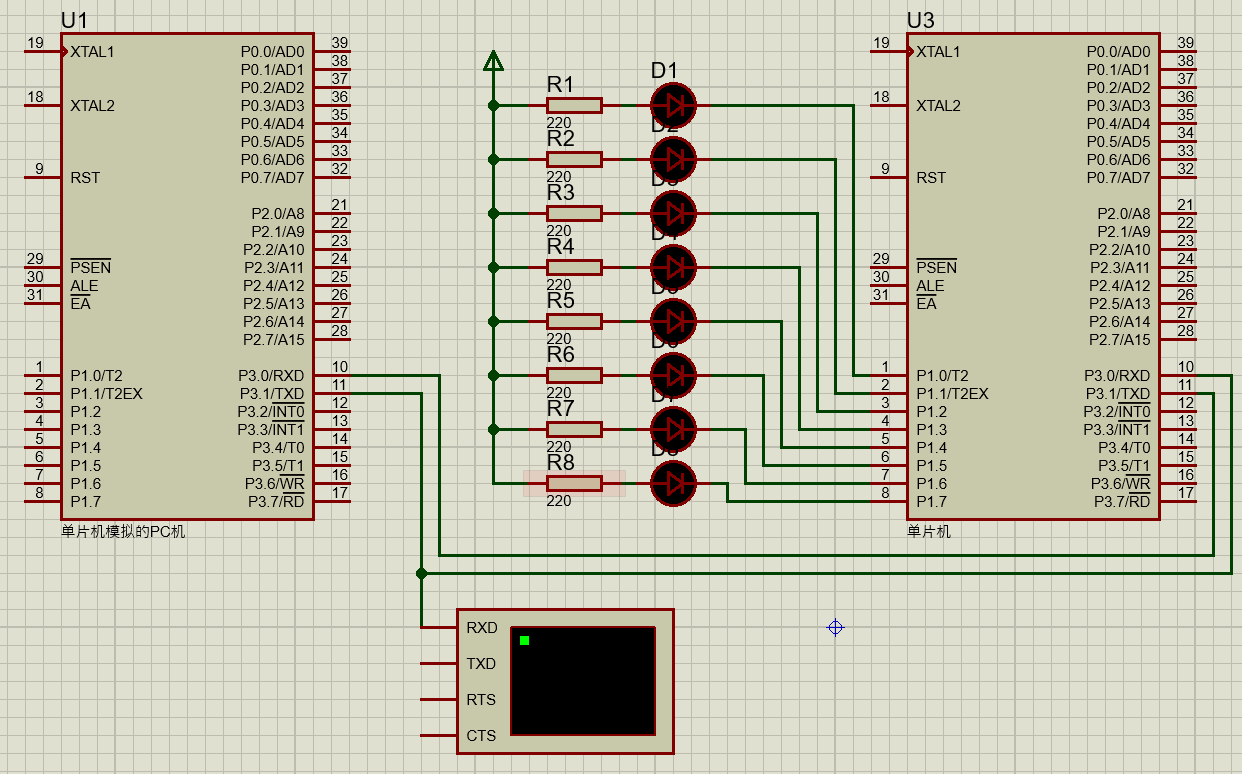
三、单片机接收PC机发送的数据使用示例
单片机接收PC机发送的串行数据,并把接收到的数据送P1口的8位LED显示。采用单片机的串行口模拟P机 串行口。proteus仿真原理图如下:
软件设计,发送数据的代码如下:
/*实现功能:串口通信,单片机与PC机通信,单片机接收PC机发送的数据。 使用一个单片机模拟PC机[2024-01-15] zoya
*/#include <reg52.h>
#include <intrins.h>typedef unsigned char u8;
typedef unsigned int u16;u8 sendBytes=0xFE;// 延时函数,单位ms
void delay(u16 i)
{u8 j;for(;i>0;i--){for(j=0;j<125;j++);}
}// 串口通信初始化函数
void UsartInit()
{SCON=0x40; // 串口工作方式1,只发送不接收TMOD=0x20; // 定时器工作方式2TH1=TL1=0xFD; // 设置波特率为9600bps,波特率不倍增PCON=0x00;TR1=1; // 启动计数
}void main()
{u8 i;UsartInit();while(1){for(i=0;i<7;i++){// 发送数据SBUF = sendBytes;while(!TI);_nop_();TI=0;delay(200);sendBytes=_crol_(sendBytes,1);}for(i=0;i<7;i++){// 发送数据SBUF = sendBytes;while(!TI);_nop_();TI=0;delay(200);sendBytes=_cror_(sendBytes,1);}}
}
接收数据的代码如下:
/*实现功能:串口通信,单片机与PC机通信,单片机接收PC机发送的数据。 接收PC机数据[2024-01-15] zoya
*/
#include <reg52.h>typedef unsigned char u8;
typedef unsigned int u16;#define GPIO_LED P1void UsartInit()
{SCON=0x50; // 串口工作方式1,接收数据TMOD=0x20; // 定时器T1工作方式2TH1=TL1=0xFD; // 波特率9600bps,不倍增PCON=0x00;TR1=1; // 启动计数
}
void main()
{u8 tmp;UsartInit();while(1){while(!RI); // 等待接收数据结束RI=0;tmp=SBUF;GPIO_LED=tmp;}
}
仿真结果:
四、PC机与单片机或与多个单片机的串行通信
一台PC机与若干台单片机可构成小型分布式测控系统,如下图所示,该系统在许多实时的工业控制和数据采集系统中,可以充分发挥单片机功能强、抗干扰性好、面向控制等优点,同时又可利用PC机弥补单片机在数据处理和人机对话等方面的不足。
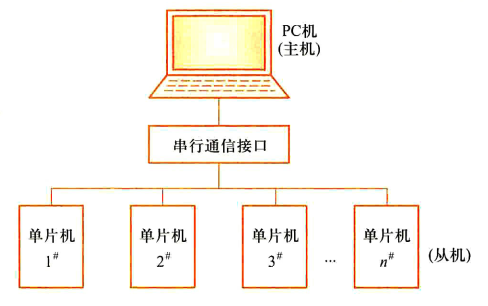
在应用系统中,一般是以PC机作为主机,定时扫描以AT89S52单片机为核心的前沿单片机,以便采集数据或发送控制信息。
在这样的系统中,以AT89S52单片机为核心的智能式测量和控制仪表(从机)既能独立地完成数据处理和控制任务,又可将数据传送给PC机(主机)。PC机将这些数据进行处理,或显示,或打印,同时将各种控制命令传送给各从机,以实现集中管理和最优控制。
要组成上图的分布式测控系统,首先要解决的是PC机与单片机之间的串行通信接口问题。
下面以采用RS-485接口的串行多机通信为例,说明PC机与数台AT89S52单片机进行多机通信的接口电路设计方案。PC机配有RS-232串行标准接口,可通过电路板卡转换成RS-485串行接口,AT89S52单片机本身具有全双工的串行口,该串行口加上驱动电路后就可以实现RS-485接口的串行通信。
PC机与数台AT89S52单片机进行多机通信的RS-485串行通信接口电路如下所示:
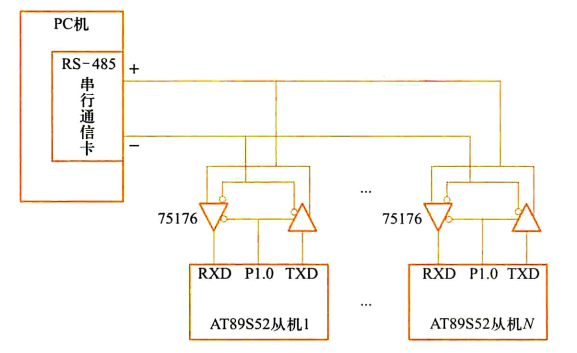
上图中,AT89S52单片机的串行口通过75176芯片驱动后就可以转换成RS-485标准接口,根据RS-485标准接口的电器特性,从机数量不多于32个。PC机与AT89S52单片机之间的串行通信采用主从方式,PC机为主机,各AT89S52为从机,由PC机来确定与哪个单片机进行通信。