效果图
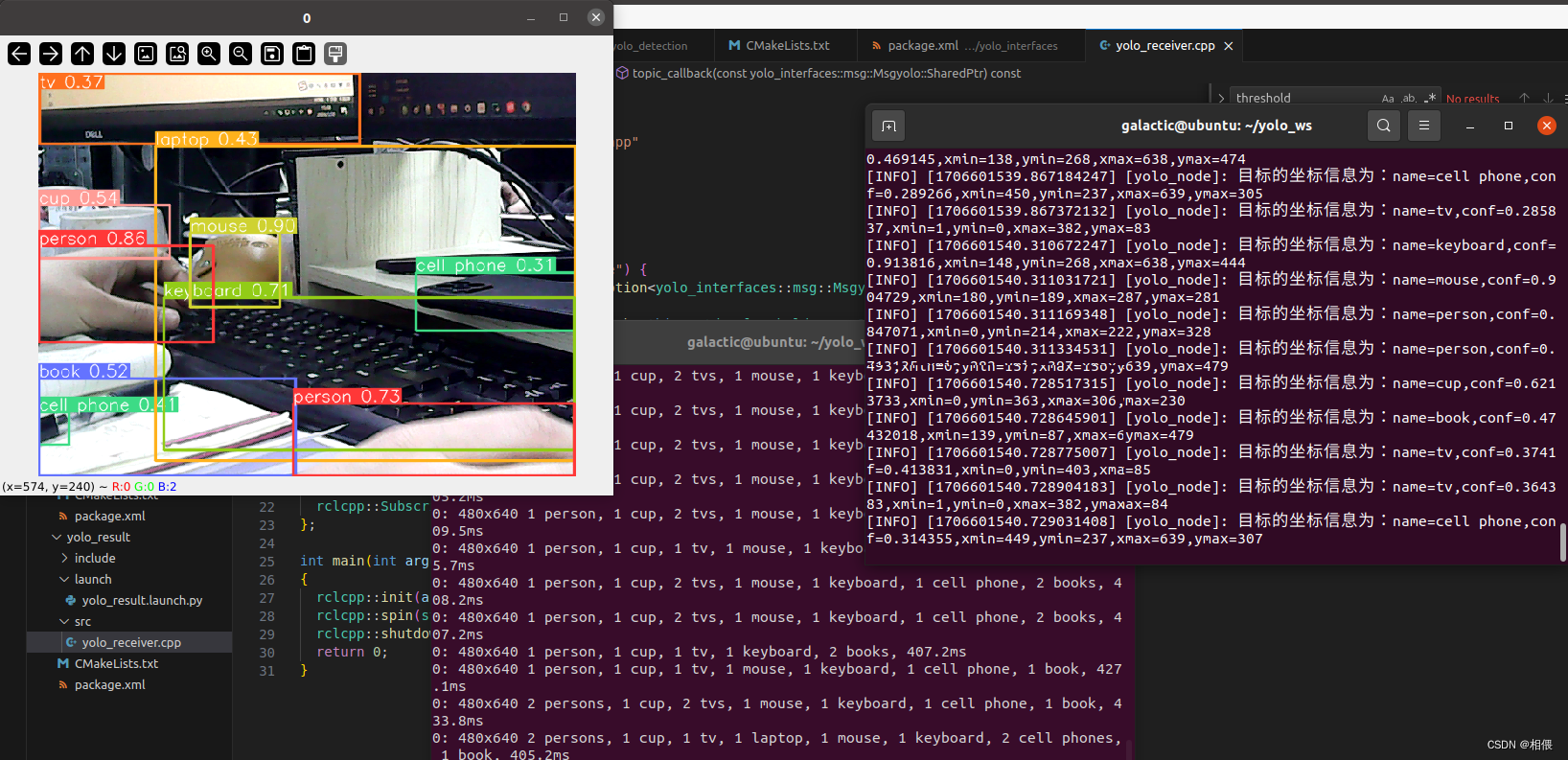
- 用yolov8实时检测物体,包括物体的类别,置信度和坐标
- 通过ros2发布出去
自定义消息
int64 xmin
int64 ymin
int64 xmax
int64 ymax
float32 conf
string name
发布端代码
from ultralytics import YOLO
import cv2
import rclpy
from yolo_interfaces.msg import Msgyolodef main(args=None):rclpy.init(args=args)node = rclpy.create_node('yolo_pub')pub = node.create_publisher(Msgyolo, 'msgyolo', 10)model = YOLO("/home/galactic/yolo_ws/src/yolo_detection/resource/yolov8m.pt") while rclpy.ok():results = model.predict(source=0, show=True, stream=