SE-0522激光导航避障雷达传感器,同型号包含SE-05225(CNS-LS05I)、SE-0526、SE-0533(CNS-LS05C)、SE-0535、SE-1022、SE-1026、SE-1033、SE-1035等,广泛应用于AGV|RGV|AMR|无人叉车|移动机器人导航、避障、安防区域防护、轮廊环境识别、超限检测等领域,支持扫描角度270°、最大检测距离10米,最小角度分辨率0.1°,具有64个切换通道选择,每个通道可设计3组不同的感应范围,支持自主切换通道,支持多种通讯方式,支持以太网输出点云数据,智能硬件自我诊断分析功能,溢出控制和计数等,设备通过德国TUV认证,市场有着大量应用,稳定性强。
本文重点介绍AGV|RGV|AMR激光导航避障雷达传感器SE-0522安全注意事项及功能说明!

一、安全事项
1.1、适用环境注意
在蒸汽、烟雾、尘埃及空气中可见的微粒都可能导致传感器判断错误甚至无法使用。
需定期安排合格的技术人员检查传感器的连接和安装是否正确。
传感器的最长使用期限为10年,此后须更换,否则可能会达不到所需的性能要求。
传感器应定期检查和清洁。
本产品任何时候都只允许在规定的限制范围内和指定的技术参数及运行条件下使用。
1.2、接线环境注意
请勿将电源接反或接入高于限定的最高工作电压,否则将会导致传感器损坏。
电源接入低于限定的最低工作电压,将会导致传感器无法工作或者工作异常;
请按照手册指导接线,否则传感器可能无法正确检测到输入信号;
输出信号端接入设备请勿超过传感器负载能力,否则将会导致传感器故障;
1.3、调试环境注意
仅允许具备资格的授权人员连接、安装、调试和设置激光传感器;
确认与传感器关联的外围设备处于可靠停止运行状态;
确认调试人员自身处于安全位置;
确认其他人员或者物体已经处于设备的活动范围外;

二、功能简介
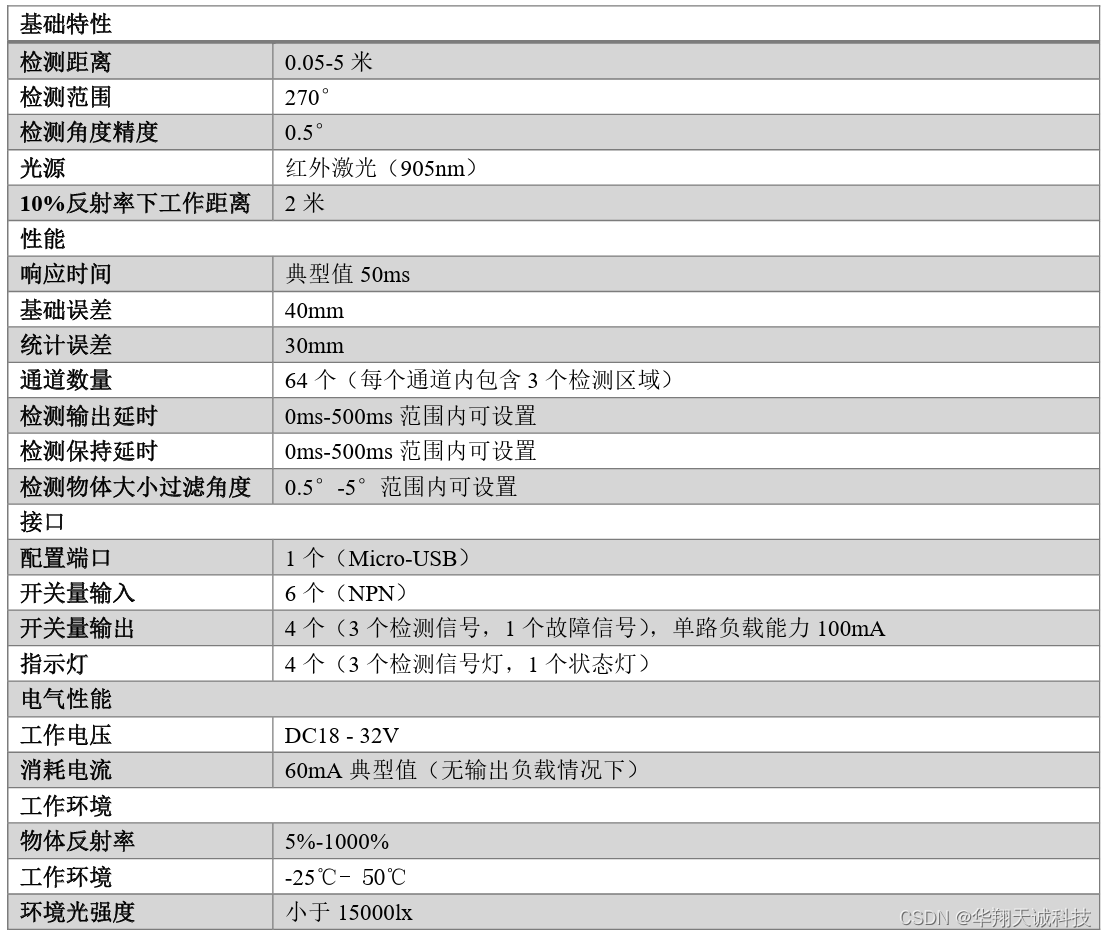
2.1、主要特性
2.1、设备功能
激光扫描传感器是根据飞行时间(TOF)测量原理运行的。在极高的同步时钟下,以均匀的时间间隔发射激光, 激光光束遇到物体时会反射回来,扫描传感器接收到反射的光束后,通过发射和接收的时间差Δt 来计算从激光传 感器到物体的距离。

利用激光光束对周围进行二维扫描,获得一个环境轮廓图形。通过软件配置建立保护区域范围,一旦有物体处 于设定的区域内,传感器就会有对应的输出端口信号输出,上位机获取后信号后进一步做出判断和处理。
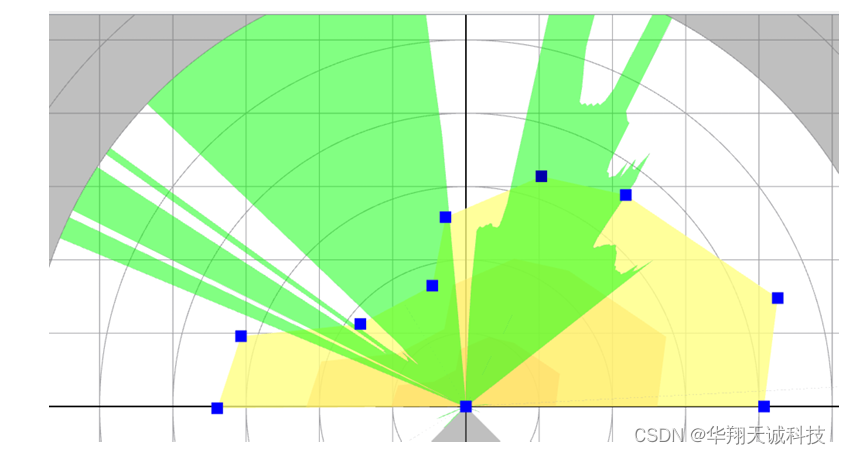
传感器内有64个通道,可以最多设置64个不同感应范围。满足不同场合下检测需求。
如下图AGV使用过程应用。
当AGV运行到线路A位置时候,使用通道1设置的感应范围检测;
当AGV运行到线路B位置时候,由于外部空间变换原来的通道1感应范围无法通过,则切换到感应范围设置 较小一些的通道2就可以运行通过。

更多关于AGV|RGV|AMR激光导航避障雷达传感器SE-0522安全注意事项及功能说明,华翔天诚科技欢迎您的交流!