RflySim| 定点位置控制器设计实验三
01 分析实验
1.调节PD控制器的相关参数改善系统控制性能,并记录超调量和调节时间,得到满意的参数。
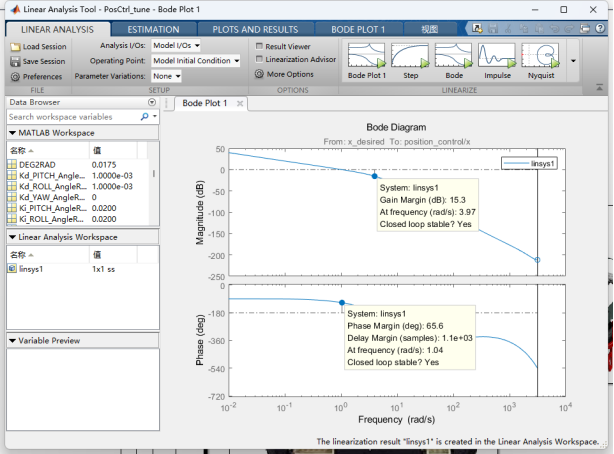
2.在得到满意参数后,对系统进行扫频以绘制Bod图,观察系统幅频响应、相频响应曲线,分析其稳定裕度。
本实验对应demo文件对于RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e6-PositionCtrl\e6.2;
对于RflySim v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e6-PositionCtrl\e6.2;
模型初始设置:PID参数步骤与姿态控制的参数调试步骤相同。先调试内环速度环,再调试外环的位置环,先调高度再调水平位置。调试文件在“e6-PositionCtrl\PID-Config\e6.2\PosCtrl_tune.slx”文件夹中。
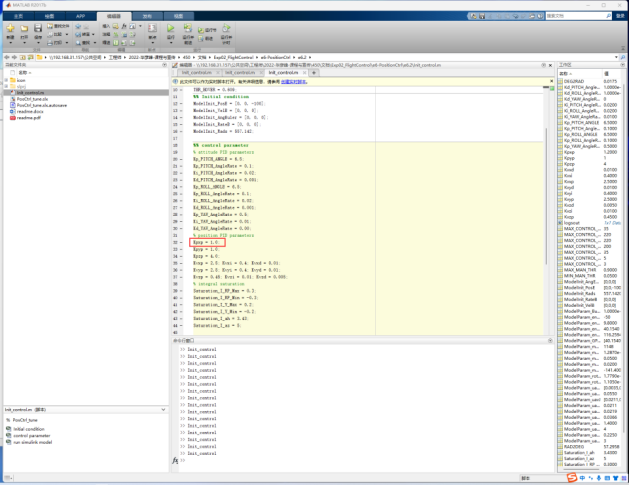
调节参数的初始状态应是飞行器处于高空悬停状态,将初始高度设置为100m,电机的初始转速设置为557.1420rad/s,这个初始条件对应于飞行器在空中100m处悬停。修改“Init_control.m”文件中的对应参数如下。
ModelInit_PosE = [0, 0, -100];
ModelInit_VelB = [0, 0, 0];
ModelInit_AngEuler = [0, 0, 0];
ModelInit_RateB = [0, 0, 0];
ModelInit_Rads = 557.142;
速度控制环参数调节:
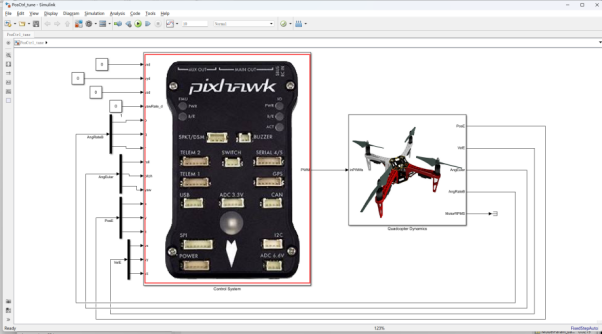
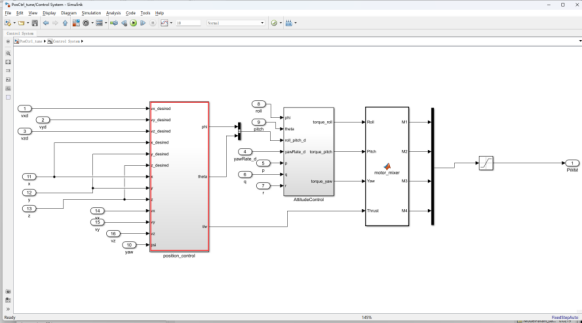
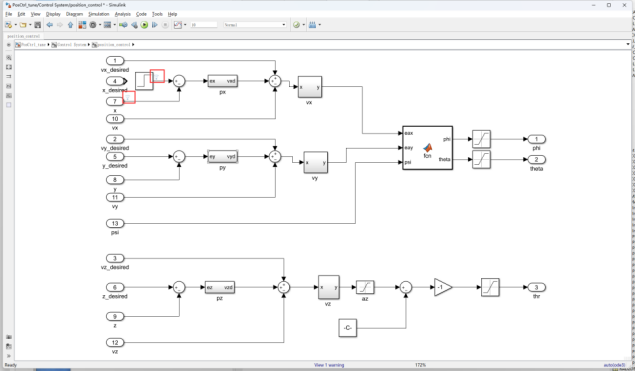
首先调节内环PID参数打开“e6-PositionCtrl\PID-Config\e6.2\PosControl_tune.slx” 文件中的“Control System”子模块中的 “position_control”模块,即为位置控制系统模型。将其中x通道的速度期望部分换成阶跃输入,并将输入输出设置为“Enable Data logging” 。
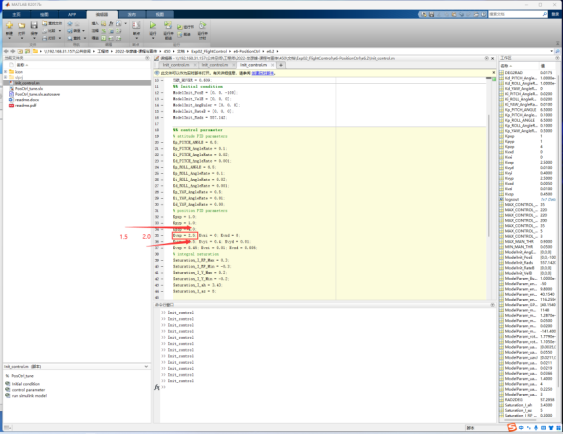
在“Init_control.m”文件中修改内环PID参数的值。先设定比例项参数,积分和微分参数设为0,Kvxp参数设置分别为1.5、2.0和2.5。

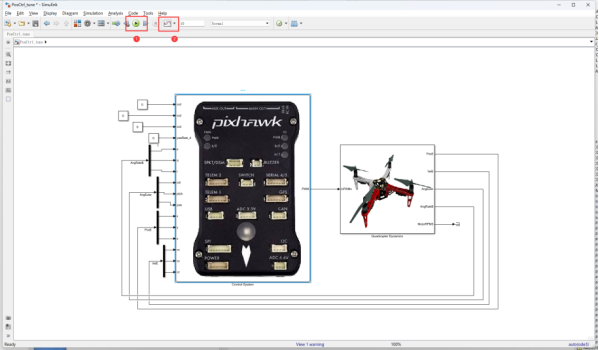
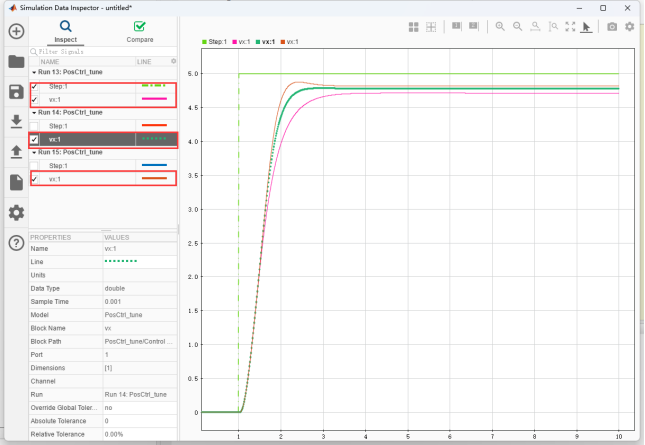
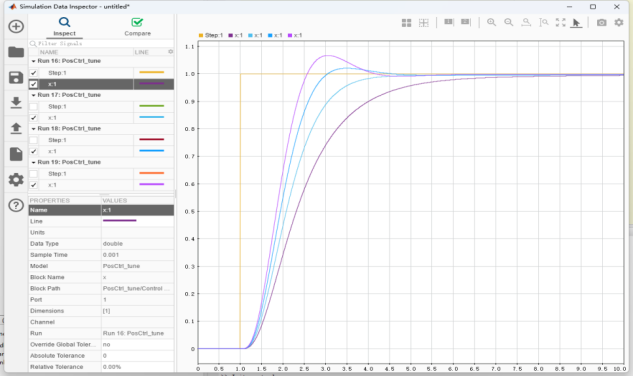
依次运行“Init_control.m”文件。点击Simulink的 “Run”按钮开始仿真,在“Simulation Data Inspector”中查看输入输出波形,如下图所示:
由小到大逐渐增大比例项系数值,得到阶跃响应曲线如图:
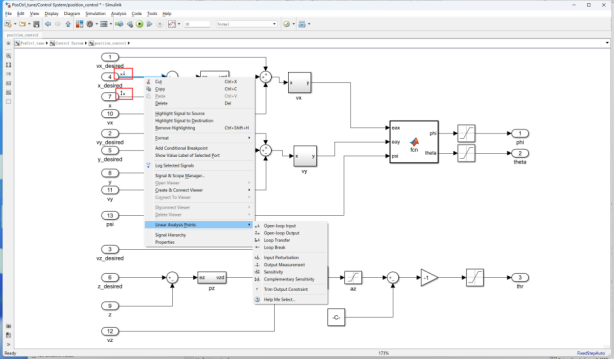
位置环参数调节:使用步骤二中得到的速度环参数,在“PosControl_tune.slx”文件中,将 “x_desired”换为阶跃输入,并将阶跃输入和“x”信号线设置为“Enable Data Logging”,如下图所示:
如下图在“Init_control.m”由小增大位置环比例项系数,即“Kpxp”的值,分别为0.6、0.8、1.0和1.2。
在“Simulation Data Inspector”观察阶跃响应,如下图:
扫频得到Bode图:设定信号输入输出点。将“x_desired”输入线设为“Open-loop Input” ,“ x ”设置为 “Open-loop Output”如下图所示。
得到Bode图如下图:
参考文献:
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.