时间序列预测 —— ConvLSTM 模型
时间序列预测是一项重要的任务,ConvLSTM(卷积长短时记忆网络)是深度学习领域中用于处理时序数据的强大工具之一。本文将介绍 ConvLSTM 的理论基础、优缺点,与其他常见时序模型(如 LSTM、GRU、TCN)的区别,并使用 Python 和 Keras 实现 ConvLSTM 的单步预测和多步预测。
1. ConvLSTM 的理论与公式
1.1 ConvLSTM 简介
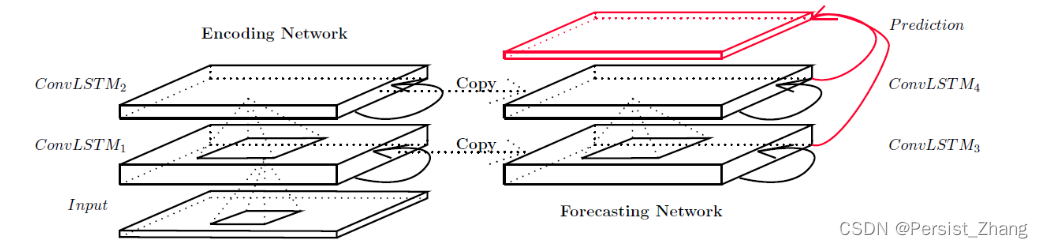
ConvLSTM 是一种结合卷积神经网络(CNN)和长短时记忆网络(LSTM)的架构,专门用于处理时序数据。与传统的 LSTM 不同,ConvLSTM 在每个时间步应用卷积操作,有助于捕捉时序数据中的空间信息。
1.2 ConvLSTM 单步预测公式
ConvLSTM 单步预测的基本公式如下:
f t = σ g ( W x f ∗ X t + W h f ∗ H t − 1 + W c f ∘ C t − 1 + b f ) \begin{equation} f_t = \sigma_g(W_{xf} * X_t + W_{hf} * H_{t-1} + W_{cf} \circ C_{t-1} + b_f) \end{equation} ft=σg(Wxf∗Xt+Whf∗Ht−1+Wcf∘Ct−1+bf)
i t = σ g ( W x i ∗ X t + W h i ∗ H t − 1 + W c i ∘ C t − 1 + b i ) \begin{equation} i_t = \sigma_g(W_{xi} * X_t + W_{hi} * H_{t-1} + W_{ci} \circ C_{t-1} + b_i) \end{equation} it=σg(Wxi∗Xt+Whi∗Ht−1+Wci∘Ct−1+bi)
C t = f t ∘ C t − 1 + i t ∘ tanh g ( W x c ∗ X t + W h c ∗ H t − 1 + b c ) \begin{equation} C_t = f_t \circ C_{t-1} + i_t \circ \tanh_g(W_{xc} * X_t + W_{hc} * H_{t-1} + b_c) \end{equation} Ct=ft∘Ct−1+it∘tanhg(Wxc∗Xt+Whc∗Ht−1+bc)
o t = σ g ( W x o ∗ X t + W h o ∗ H t − 1 + W c o ∘ C t + b o ) \begin{equation} o_t = \sigma_g(W_{xo} * X_t + W_{ho} * H_{t-1} + W_{co} \circ C_t + b_o) \end{equation} ot=σg(Wxo∗Xt+Who∗Ht−1+Wco∘Ct+bo)
H t = o t ∘ tanh g ( C t ) \begin{equation} H_t = o_t \circ \tanh_g(C_t) \end{equation} Ht=ot∘tanhg(Ct)
其中, σ g \sigma_g σg表示 sigmoid 激活函数, tanh g \tanh_g tanhg 表示双曲正切激活函数。 X t X_t Xt 是当前时间步的输入, H t − 1 H_{t-1} Ht−1是上一时间步的隐藏状态, C t − 1 C_{t-1} Ct−1 是上一时间步的记忆单元, f t f_t ft、 i t i_t it、 C t C_t Ct、 o t o_t ot 分别表示遗忘门、输入门、记忆单元和输出门。(W) 和 (b) 是模型参数。
1.3 ConvLSTM 多步预测
ConvLSTM 的多步预测与单步预测类似,只需将单步预测的输出作为下一时间步的输入,进行递归计算。
2. ConvLSTM 与其他时序模型的区别
2.1 与 LSTM 的区别
- 卷积操作: ConvLSTM 在每个时间步引入卷积操作,有助于捕捉时序数据的空间信息,而 LSTM 主要侧重于序列建模。
- 参数共享: ConvLSTM 中的卷积核在每个时间步都是共享的,这有助于提取相似的特征。
2.2 与 GRU 的区别
- 遗忘门与更新门: ConvLSTM 使用遗忘门和更新门来控制记忆单元的信息流,而 GRU 只使用更新门。
- 复杂度: ConvLSTM 的参数量相对较大,适用于更复杂的时序模式。
2.3 与 TCN 的区别
- 结构: ConvLSTM 结合了卷积和循环结构,适用于同时捕捉时空信息。而 TCN 主要基于纯卷积结构。
- 门控机制: ConvLSTM 使用了门控机制,有助于控制信息的流动。
3. Python 实现 ConvLSTM 的单步预测
以下是 ConvLSTM 单步预测的简化代码:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.preprocessing import MinMaxScaler
from keras.models import Sequentialfrom keras.layers import ConvLSTM2D, Dense# 生成示例数据
def generate_data():t = np.arange(0, 100, 0.1)data = np.sin(t) + 0.1 * np.random.randn(len(t))return data# 数据预处理
def preprocess_data(data, look_back=10):scaler = MinMaxScaler(feature_range=(0, 1))data = scaler.fit_transform(data.reshape(-1, 1)).flatten()X, y = [], []for i in range(len(data) - look_back):X.append(data[i:(i + look_back)])y.append(data[i + look_back])return np.array(X), np.array(y)# 构建 ConvLSTM 模型
def build_conv_lstm_model(look_back):model = Sequential()model.add(ConvLSTM2D(filters=64, kernel_size=(1, 3), activation='relu', input_shape=(1, look_back, 1)))model.add(Dense(units=1, activation='linear'))model.compile(optimizer='adam', loss='mean_squared_error')return model# 单步预测
def conv_lstm_single_step_predict(model, X):return model.predict(X.reshape(1, 1, X.shape[1], 1))[0, 0]# 主程序
data = generate_data()
look_back = 10
X, y = preprocess_data(data, look_back)# 划分训练集和测试集
train_size = int(len(X) * 0.8)
X_train, y_train = X[:train_size], y[:train_size]
X_test, y_test = X[train_size:], y[train_size:]# 调整输入形状
X_train = X_train.reshape(X_train.shape[0], 1, X_train.shape[1], 1)
X_test = X_test.reshape(X_test.shape[0], 1, X_test.shape[1], 1)# 构建和训练 ConvLSTM 模型
conv_lstm_model = build_conv_lstm_model(look_back)
conv_lstm_model.fit(X_train, y_train, epochs=50, batch_size=1, verbose=2)# 单步预测
single_step_prediction = conv_lstm_single_step_predict(conv_lstm_model, X_test[0])# 可视化结果
plt.plot(data, label='True Data')
plt.plot(np.arange(train_size, len(data)), [None] * train_size + [single_step_prediction],label='ConvLSTM Single-step Prediction')
plt.legend()
plt.show()
请注意,此代码是一个简化示例,实际应用中可能需要更详细的调整和参数优化。
4. Python 实现 ConvLSTM 的多步预测
以下是 ConvLSTM 多步预测的简化代码:
# 多步预测
def conv_lstm_multi_step_predict(model, X, n_steps):predictions = []for _ in range(n_steps):prediction = conv_lstm_single_step_predict(model, X)predictions.append(prediction)X = np.append(X[0, 0, 1:], prediction).reshape(1, 1, X.shape[2] + 1, 1)return predictions# 多步预测示例
n_steps = 10
multi_step_predictions = conv_lstm_multi_step_predict(conv_lstm_model, X_test[0], n_steps)# 可视化结果
plt.plot(data, label='True Data')
plt.plot(np.arange(train_size, len(data)), [None] * train_size + [single_step_prediction] + multi_step_predictions,label='ConvLSTM Multi-step Predictions')
plt.legend()
plt.show()
这个例子中,使用 ConvLSTM 模型对时序数据进行了单步预测和多步预测。可以根据实际数据进行相应的修改。
5. 总结
本文介绍了 ConvLSTM 模型的理论基础、与其他时序模型的区别,并通过 Python 和 Keras 实现了 ConvLSTM 的单步预测和多步预测。ConvLSTM 在处理时序数据中的空间信息方面具有优势,可以应用于各种领域的时间序列预测任务。在实际应用中,更复杂的模型结构和参数调整可能是必要的。