由于无人机具有机动快速、使用成本低、维护操作简单等技术特点,因此被作为一种理想的飞行平台广泛应用于军事和民用各个领域。尤其是进入二十一世纪以后,许多国家将无人机系统的研究、开发、应用置于优先发展的地位,体积小、重量轻、探测精度高的新型传感器的不断问世,也使无人机系统的用途迅速拓展。

基于无人机技术的测绘遥感系统,使其具有高分辨率影像快速获取与处理能力,前期检校、测试后,按照项目需求获取大比例尺航空影像资料进而测制数字正射影像图(DOM)、数字高程模型(DEM)、数字表面模型(DSM)、数字线划图(DLG)、真正射数字正射影像图(TDOM)的功能需求。
技术优势
机动快速的响应能力无人机系统运输便利、升空准备时间短、操作简单,可快速到达监测区域,机载高精度遥感设备可以在短时间内快速获取遥感监测结果。
性能优异无人机可按预定飞行航线自主飞行、拍摄,航线控制精度高,飞行姿态平稳。
操作简单可靠飞行操作自动化、智能化程度高,操作简单,并有故障自动诊断及显示功能,便于掌握和培训;一旦遥控失灵或其他故障,飞机自动返航到起飞点上空,盘旋等待。若故障解除,则按地面人员控制继续飞行,否则自动开伞回收。
高分辨率遥感影像数据获取能力无人机搭载的高精度数码成像设备,具备面积覆盖、垂直或倾斜成像的技术能力,获取图像的空间分辨率达到分米级,适于1∶1万或更大比例尺遥感应用的需求。
使用成本低无人机系统的运营成本较低,飞行操作员的培训时间短,系统的存放、维护简便,还可免去了调机和停机的费用。
主要应用领域
它以无人驾驶飞行器为飞行平台、以高分辨率数字遥感设备为机载传感器、以获取低空高分辨率遥感数据为应用目标,具有快速、实时对地观测、调查监测能力,因此在土地利用动态监测、矿产资源勘探、地质环境与灾害调查、海洋资源与环境监测、地形图更新等领域都将有广泛应用。
主要优势
传统的卫星遥感和普通航空摄影成本高、受天气等因素影响比较大。与此相比,无人驾驶飞行器遥感系统的机动灵活和经济便捷是它的主要优势。
无人机遥感系统具有机动快速的响应能力,系统运输便利、升空准备时间短、操作简单,可快速到达监测区域,机载高精度遥感设备可以在短时间内快速获取遥感监测结果。更为重要的是,由于制造和飞行成本都很低,飞行操作员的培训时间短,系统存放、维护简便,用户完全可以自主拥有和应用,这样就可以免去运输过程,更加缩短了系统的响应速度。
性能和安全性
无人机的操作性能十分优异。它能按预定飞行航线自主飞行、拍摄,航线控制精度高,飞行姿态平稳。它的飞行高度从50米到4000米,高度控制精度 10米。系统飞行操作自动化、智能化程度高,操作简单,有故障自动诊断及显示功能,一旦遥控失灵或其他故障,飞机自动返航到起飞点上空,盘旋等待。若故障解除,则按地面人员控制继续飞行,否则自动开伞回收。
系统的组成
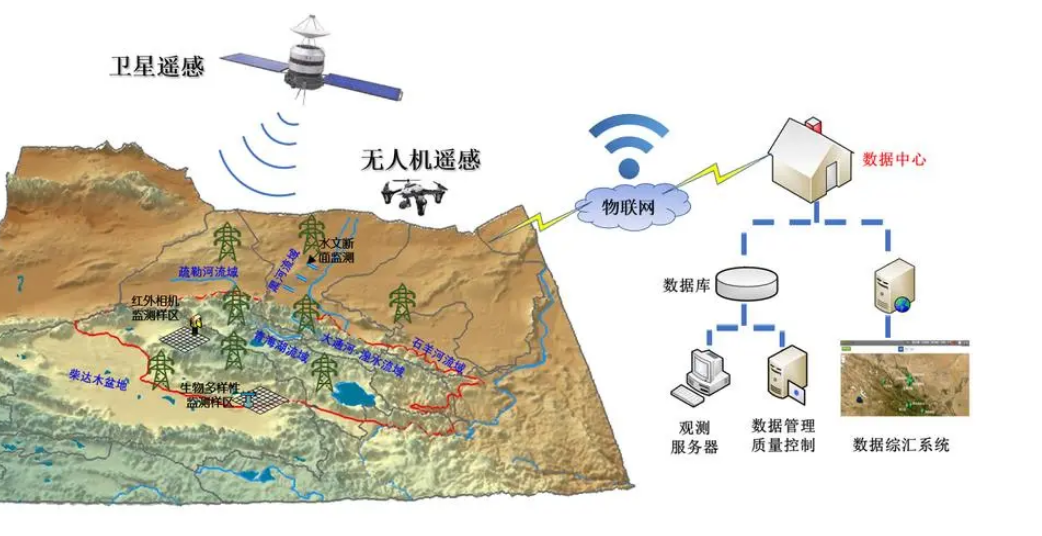
无人机低空遥感监测系统由遥感设备及其控制系统、无人驾驶飞行平台、飞行控制系统、无线电遥测遥控系统、遥感数据处理系统等几部份组成。
遥感设备及其控制系统
机载遥感设备及其控制系统用于获取遥感影像,是无人机低空遥感监测系统的重要组成部份,主要由机载遥感设备、稳定平台及任务设备控制计算机系统等组成。
根据不同遥感任务的需要,系统能够搭载的遥感设备包括面阵CCD数码相机、光学胶片相机、成像光谱仪、磁测仪、CCD摄录机等。

机载稳定平台的主要功能是用于遥感设备的稳定和偏流角的修正,以确保获得高质量的遥感影像。稳定平台设计三轴和单轴两种:三轴稳定平台可以使传感器保持水平稳定并修正偏流角,由平台、电机、陀螺仪、水平传感器、舵机、控制电路等组成;单轴稳定平台只修正偏流角,由平台、电机和控制电路组成。两种稳定平台可以根据不同精度的遥感监测任务选用。任务设备控制计算机能根据无人机的位置、地速、高度、航向、姿态角以及设定的航摄比例尺和重叠度等数据,自动计算并控制相机的曝光间隔和稳定平台的偏流角修正,具有程控和遥控两种控制方式。
无人驾驶飞行平台技术要求
气动布局合理、性能稳定的无人驾驶飞行平台是系统的基本保障。无人机要采用玻璃钢和碳纤维复合材料加工而成,重量轻、强度大。机身为车厢形式,有较大的容积范围,便于设备的安装及使用维护,无人机的任务载荷和任务设备仓的尺寸根据遥感设备及其控制系统的重量和尺寸设定。无人机的后端安装有性能稳定的航空发动机和推力螺旋桨为动力装置。无人机的起降可以采用正常的滑行方式,同时还开发了性能先进的车载起飞、伞降回收机构,适应不同地区和不同遥感任务的使用。
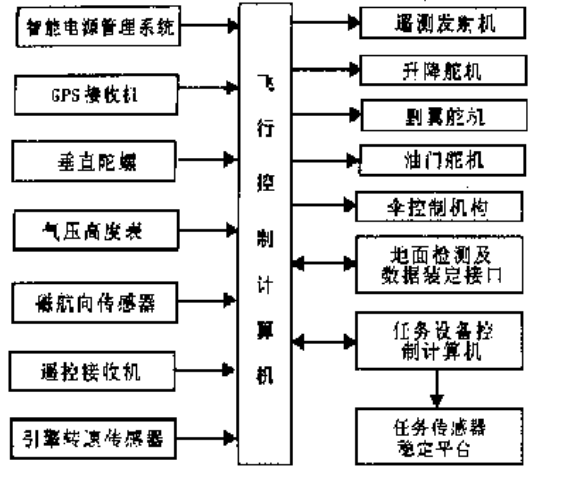
飞行控制系统
飞行控制系统完成无人机的飞行控制与飞行管理。飞行控制系统用于无人机的飞行控制与任务设备管理,包括传感器、执行机构和飞行控制计算机三个部份。由姿态陀螺、气压高度表、磁航向传感器、GPS导航定位装置、飞控计算机、执行机构、电源管理系统等组成,可实现对飞机姿态、高度、速度、航向、航线的精确控制,具有遥控、程控和自主飞行三种飞行模态。在这个系统中,飞控计算机通过串行数据通讯接口接收高度/空速、三轴地磁向强度、GPS卫星信息等传感器数据。通过模拟输入采集俯仰/横滚姿态角、三轴角速率等传感器模拟信号,根据这些信息,实时解算各飞行参数。
无线电遥测遥控系统
无线电遥测系统是传送无人机和遥感设备的状态参数,可实现飞机姿态、高度、速度、航向、方位、距离及机上电源的测量和实时显示,具有数据和图形两种显示功能。供地面人员掌握无人机和遥感设备的有关信息,并存贮所有传送信息,以便随时调用复查。无线电遥控系统是用于传输地面操纵人员的指令,引导无人机按地面人员的旨意飞行。
遥感数据处理系统
为保证无人机遥感监测系统具有对地实时调查监测能力,在目前现有的遥感数据处理软件的基础上,还根据无人机机载遥感设备的技术特点研制、开发了专用的数据处理系统,以实现无人机遥感监测数据的快速处理,满足各种遥感监测任务的需要。
无人机低空遥感监测系统的应用前景
无人机低空遥感监测系统是一种高机动性、低成本的小型化、专用化遥感监测系统。它以无人驾驶飞行器为飞行平台、以高分辨率遥感设备为机载传感器、以获取低空高分辨率遥感数据为应用目标,具有对地快速实时调查监测能力。随着系统功能的不断完善,可广泛应用于土地利用动态监测、矿产资源勘探、地质环境与灾情监测、地形图更新与地籍测量、海洋资源与环境监测以及农业、林业、水利、交通等部门,尤其对车船无法到达地带的环境监测、有毒地区的污染监测、灾情监测及救援指挥,无人机低空遥感监测系统更具有其独特的优势。