PID 参数整定就是确定比例系数(Kp )、积分系数(Ki)和微分系数(Kd )的过程,以便使 PID 控制器能够在系统中实现稳定、快速、准确的响应。
本期的主题
采用四种2024年的智能优化算法优化PID的三个参数,以便达到较好的响应曲线。
四种算法分别是:牛顿-拉夫逊优化算法,美洲狮优化算法,足球队训练算法,冠豪猪优化算法。四种算法都是2024年最新的优化算法。
具体原理
首先,采用simulink搭建具体的模型,模型简单易修改!
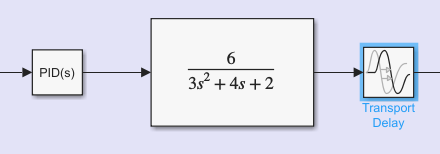
只需要打开simulink模型,修改这里的函数即可。后面的延迟环节也可以在其中随意修改!
然后,在主函数里边不断地调用该模型,并以PID参数寻优常用的四种评价(ITAE/ISE/ITSE/IAE)为适应度函数指标进行寻优。
四种适应度函数公式如下:
平方误差积分(ISE):
绝对误差积分(IAE):
时间乘方误差积分(ITSE):
时间乘绝对误差积分(ITAE):
代码中已经集成好,方便修改适应度函数:
xz = 1; %可选四种适应度函数:平方误差积分 /时间乘以绝对误差积分 /时间乘方误差积分 /绝对误差积分
if xz == 1fobj = @(x)ISE_object(x); %平方误差积分
elseif xz == 2fobj = @(x)ITAE_object(x); %时间乘以绝对误差积分
elseif xz == 3fobj = @(x)ITSE_object(x); %时间乘方误差积分
elseif xz == 4fobj = @(x)IAE_object(x); %绝对误差积分
end最后,以ITAE指标为例进行展示。将寻优得到的三个最佳参数回代适应度函数,得到不同算法的响应曲线对比图。如下所示。
响应曲线对比图:
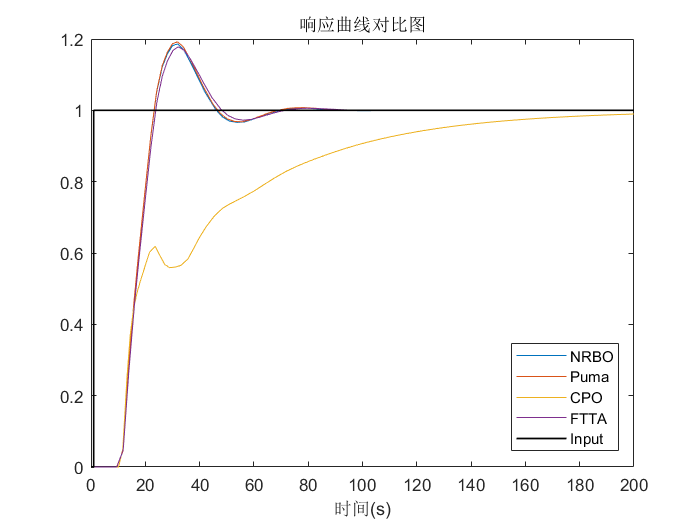
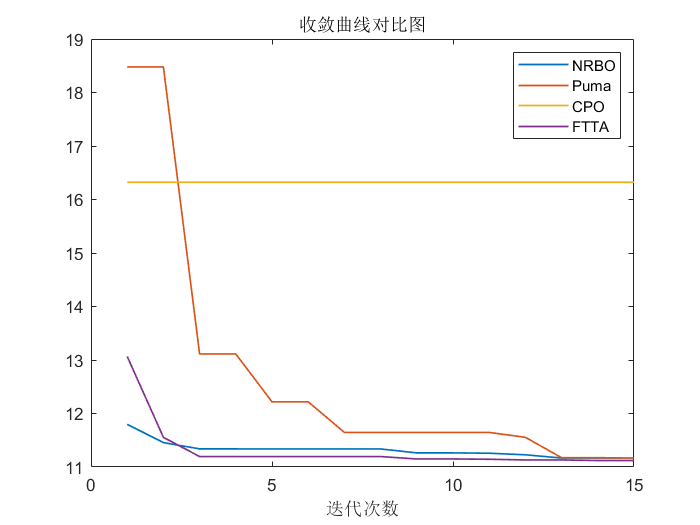
可以看到CPO算法的寻优效果最差,其他三种的寻优效果相当。
误差曲线图:
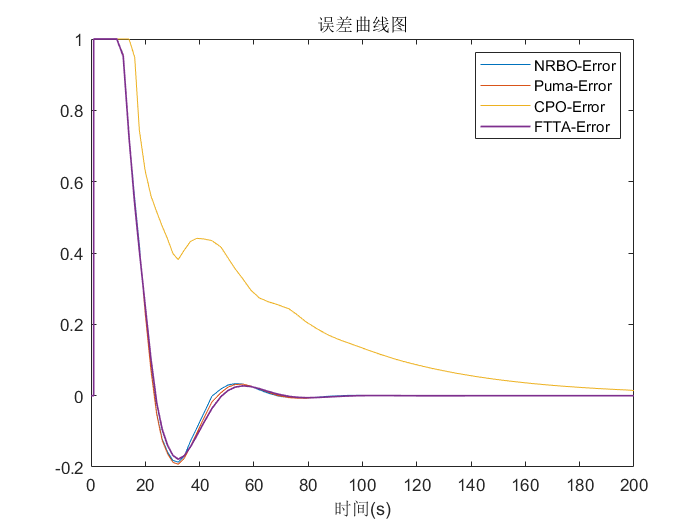
四种算法的寻优过程收敛曲线图:
最后,四种算法寻优得到最佳PID参数如下:
| NRBO | Puma | CPO | FTTA | |
| Kp | 0.08741 | 0.075192 | 0.12841 | 0.07292 |
| Ti | 3.5447 | 3 | 15.2719 | 3 |
| Td | 0.10708 | 5.438 | 0.16982 | 3.9195 |
代码目录如下:
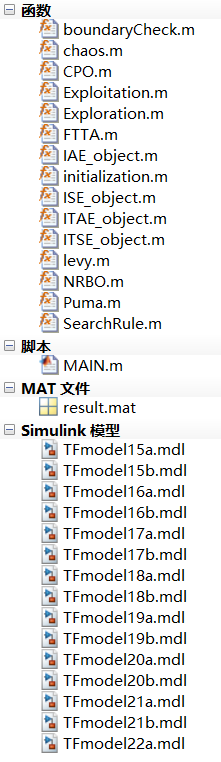
考虑到大家的matlab版本可能不同,作者在这里保存了不同版本的simulink模型。
大家选取相应的版本模型,并在主函数和四个适应度函数文件里边,把TFmodel22改成TFmodelXX对应的版本即可运行!
另外再推荐几篇往期写的PID参数整定文章:
三种智能算法优化PID参数软件,MATLABAPP开发
改进的粒子群算法整定PID参数,并与灰狼算法进行比较,附MATLAB代码
灰狼算法整定PID参数,传递函数可以任意修改,附MATLAB代码