1. 缓存的作用
为什么需要缓存呢?缓存主要解决两个问题,一个是提高应用程序的性能,降低请求响应的延时;一个是提高应用程序的并发性。
2. 缓存的分类
本地缓存,分布式缓存
3. 缓存数据分类
3.1 数据缓存
程序数据直接缓存,不需要经过计算。这种类型的缓存并不需要耗费计算性能。例如缓存用户信息。
3.2 结果缓存
程序数据并不能直接缓存,需要经过计算,或者连表查询等,将计算后的结果进行缓存,因此缓存的更新可能是昂贵的。比如缓存的报表数据。
4. 缓存过期策略
缓存使用的是内存,内存是有限的,通常无法将所有的数据都进行缓存,因此,当需要缓存的数据超过内存的大小时,需要将部分的缓存数据从缓存中踢出出去。
在有限的空间内,保留尽可能多的会经常访问的entry,过期策略就显得特别重要。常见的过期策略包括TTL,Random,LFU,LRU等。
5. 缓存模式
Cache Aside
Read/Write Through
Write Behind
| No | 缓存不一致 | 优点 | 缺点 | 适用场景 |
| CacheAside | Y | 实现比较简单 | 需要维护两个数据存储,存在分布式事务问题 | 延时要低,能容忍数据丢失和数据不一致 |
| Read/Write Through | N | 使用简单 只需要关心缓存,数据写sh入数据库由框架完成,不需要处理分布式事务问题 | 延时高 | 同步操作,数据保证一致性 |
| Write Behind | Y | 延时低 | 数据丢失和数据不一致 | 延时要低,能容忍数据丢失和数据不一致 |
6. 缓存的数据一致性问题
6.1 CacheAside数据不一致问题
(1)出现原因
1)缓存更新(含缓存新增)时,操作数据库和缓存时,一个成功,一个失败;
2)更新和query并发
(2)解决方案
为什么是删除缓存?
很多时候,在复杂点的缓存场景,缓存不单单是数据库中直接取出来的值。
更新缓存的代价有时候是很高的。是不是说,每次修改数据库的时候,都一定要将其对应的缓存更新一份?也许有的场景是这样,但是对于比较复杂的缓存数据计算的场景,就不是这样了。如果你频繁修改一个缓存涉及的多个表,缓存也频繁更新。但是问题在于,这个缓存到底会不会被频繁访问到?
举个例子,一个缓存涉及的表的字段,在 1 分钟内就修改了 20 次,或者是 100 次,那么缓存更新 20 次、100 次;但是这个缓存在 1 分钟内只被读取了 1 次,有大量的冷数据。实际上,如果你只是删除缓存的话,那么在 1 分钟内,这个缓存不过就重新计算一次而已,开销大幅度降低。用到缓存才去算缓存。
解决方案一般包括:
1)更新数据库 + 删除缓存(优于2)
2)删除缓存 + 更新数据库
3)删除缓存 + 更新数据库 + sleep + 删除缓存
4)更新数据库 + 删除缓存消息入mq/binlog消息入mq + 监听消息删除缓存
5)分布式事务解决机制
7. 分布式缓存常见问题
7.1 缓存击穿
定义:缓存击穿是指热点key在某个时间点过期的时候,而恰好在这个时间点对这个Key有大量的并发请求过来,从而大量的请求打到db。
解决方案:
- 若缓存的数据是基本不会发生更新的,则可尝试设置热点数据永远不过期;
- 采用多级缓存架构,热点数据,肯定数据量不大,可以使用 本地缓存;
- 若缓存的数据更新频繁或者在缓存刷新的流程耗时较长的情况下,可以利用定时线程在缓存过期前主动地重新构建缓存或者延后缓存的过期时间,以保证所有的请求能一直访问到对应的缓存;
- 若缓存的数据更新不频繁,且缓存刷新的整个流程耗时较少的情况下可以加互斥锁,保障缓存中的数据,被第一次请求回填。此方案不适用于超高并发场景。
7.2 缓存穿透
定义:缓存穿透是指查询一个一定不存在的数据,由于缓存是不命中时需要从数据库查询,查不到数据则不写入缓存,这将导致这个不存在的数据每次请求都要到数据库去查询,进而给数据库带来压力。
解决方案:
1、**接口校验**:在正常业务流程中可能会存在少量访问不存在 key 的情况,但是一般不会出现大量的情况,所以这种场景最大的可能性是遭受了非法攻击。可以在最外层先做一层校验:用户鉴权、数据合法性校验等,例如商品查询中,商品的ID是正整数,则可以直接对非正整数直接过滤等等。
2、缓存空值:当访问缓存和DB都没有查询到值时,可以将空值写进缓存,但是设置较短的过期时间,该时间需要根据产品业务特性来设置。
3、hashmap记录存在性:存在去查redis,不存在直接返回。
4、布隆过滤器:使用布隆过滤器存储所有可能访问的 key,不存在的 key 直接被过滤,存在的 key 则再进一步查询缓存和数据库。
7.3 缓存雪崩
定义:缓存雪崩是指缓存中数据大批量到过期时间,而查询数据量巨大,引起数据库压力过大甚至down机。
解决方案:
- 事前:Redis 高可用,主从+哨兵,Redis cluster,避免全盘崩溃;过期时间打散,热点数据不过期;
- 事中:本地 ehcache 缓存 + hystrix 限流&降级,避免 MySQL 被打死。
- 事后:Redis 持久化,一旦重启,自动从磁盘上加载数据,快速恢复缓存数据。
7.4 BigKey
7.4.1 定义
Big Key就是某个key对应的value很大,占用的redis空间很大,本质上是大value问题。
7.4.2 产生原因
- 1. 数据结构使用不恰当
- 2. 未及时清理垃圾数据
- 3. 对业务预估不准确
- 4. 热点数据列表
7.4.3 危害
1、阻塞请求、
2、内存增大
3、阻塞网络
4、影响主从同步、主从切换
7.4.4 bigKey识别
7.4.5 解决方案
1、对大Key进行拆分
2、对大Key进行清理
3、监控Redis的内存、网络带宽、超时等指标
4、定期清理失效数据
5、压缩value
7.5 HotKey
某些key访问量特别大,这种情况下,由于这些key只有一份,无法通过横向扩展进行进一步负载均衡。解决方案包括:
(1)二级缓存
通过本地缓存来解决。
(2)增加分布式缓存的冗余
通常一个缓存在分布式缓存中只有一份,通过多设置几份冗余数据,分布到不同的节点上来进行负载均衡。
(3)限流
HotKey很难预测,限流是兜底方案。
8. 多级缓存
通常包括二级缓存和三级缓存。
8.1 二级缓存
8.1.1 本地缓存
本地缓存可以解决以下问题:
(1)延时要求极高
因为本地缓存的访问速度最快
(2)hotKey问题
hotkey分布式缓存不能通过横向扩展来解决
(3)带宽限制
数据分摊到不同的缓存节点,但这成本比本地缓存高很多
8.1.2 多级缓存的数据一致性
不能使用删除策略,因为本地缓存一般是热点数据,删除会导致缓存击穿。
8.2 三级缓存
L3级缓存的数据一致性保障以及防止缓存击穿方案:
1.数据预热(或者叫预加载)
2.设置热点数据永远不过期,通过 ngx.shared.DICT的缓存的LRU机制去淘汰
3.如果缓存主动更新,在快过期之前更新,如有变化,通过订阅变化的机制,主动本地刷新
4.提供兜底方案,如果本地缓存没有,则通过后端服务获取数据,然后缓存起来
9. 分布式缓存结构问题
分布式缓存架构需要解决本身的一些架构问题:
(1)高可用
主从,集群,并由此带来的主从数据复制,数据分片,选举,数据丢失等问题。
(2)高并发
负载均衡:请求响应均衡,数据分布均衡
(3)高性能
序列化,压缩,集群间通信,一致性协议
(4)监控
命中率,内存,cpu,健康状态
9.1 数据分片
(1)Range分片
常用在关系型数据库的设计。
比如:1到100个数字,要保存在3个节点上,按照顺序分区,把数据平均分配成三个片段
-
1号到33号数据为 片段1
-
34号到66号数据为 片段2
-
67号到100号数据为 片段3

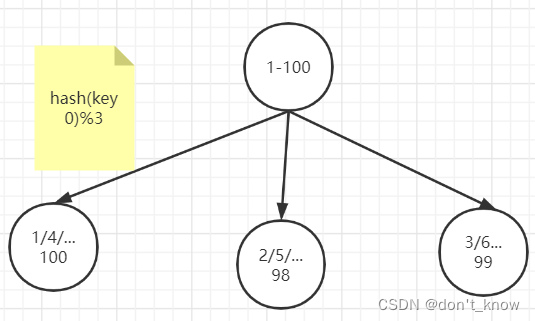
(2)节点取余分片
比如有100个数据,对每个数据进行hash运算之后,与节点数进行取余运算,根据余数不同保存在不同的节点上。
缺点:
当增加或减少节点时,原来节点中的80%的数据会进行迁移操作,对所有数据重新进行分片。
建议:
建议使用多倍扩容的方式,例如以前用3个节点保存数据,扩容为比以前多一倍的节点即6个节点来保存数据,这样只需要适移50%的数据。
数据迁移之后,第一次无法从缓存中读取数据,必须先从数据库中读取数据,然后回写到缓存中,然后才能从缓存中读取迁移之后的数据。
(3)一致性哈希分区
步骤:构造一致性哈希环、节点映射、路由规则。
1)构造一致性哈希环
通过哈希算法,将哈希值映射到哈希空间([0, 2^32])。
2)节点映射
将集群中的各节点映射到环上的某个一位置。比如集群中有三个节点,那么可以大致均匀的将其分布在环上。
3)路由规则
路由规则包括存储(setX)和取值(getX)规则。
当需要存储一个对时,首先计算键key的hash值:hash(key),这个hash值必然对应于一致性hash环上的某个位置,然后沿着这个值按顺时针找到第一个节点,并将该键值对存储在该节点上。
缺点:数据倾斜,不能对所有节点进行负载均衡
(4)虚拟槽分区
为了在增删节点的时候,各节点能够保持动态的均衡,将每个真实节点虚拟出若干个虚拟节点,再将这些虚拟节点随机映射到环上。此时每个真实节点不再映射到环上,真实节点只是用来存储键值对,它负责接应各自的一组环上虚拟节点。当对键值对进行存取路由时,首先路由到虚拟节点上,再由虚拟节点找到真实的节点。增加虚拟节点其实是减小了路由规则过程中的粒度,使每个真实节点可以分摊局部压力。