SPI 的英文全称为 Serial Peripheral Interface,顾名思义为串行外设接口。SPI 是一种同步串行通信接口规范,主要应用于嵌入式系统中的短距离通信。该接口由摩托罗拉在20世纪80年代中期开发,后发展成了行业规范。
SPI 是一种高速的、全双工的、同步的通信总线,并且至多仅需使用 4 根线,节约了芯片的管脚,SPI主要应用于EEPROM、FLASH、ADC、DAC等芯片,还有数字信号处理器和数字信号解码器之间。
SPI 设备之间采用全双工模式通信,是一个主机和一个或者多个从机的主从模式。主机负责初始化帧,这个数据传输帧可以用于读与写两种操作,片选线可以从多个从机选择一个来响应主机的请求。
来自主机或从机的数据在时钟上升沿或下降沿同步。主机和从机可以同时传输数据。SPI接口可以是 3 线式或 4 线式。本文重点介绍常用的 4 线 SPI 接口。
接 口
4 线 SPI 器件有四个信号:
-
时钟(SPICLK,SCLK)
-
片选(CS)主机输出
-
从机输入(MOSI)主机输入
-
从机输出(MISO)
产生时钟信号的器件称为主机。主机和从机之间传输的数据与主机产生的时钟同步。同I2C接口相比,SPI器件支持更高的时钟频率。用户应查阅产品数据手册以了解SPI接口的时钟频率规格。
SPI接口只能有一个主机,但可以有一个或多个从机。图1 显示了主机和从机之间的SPI连接。
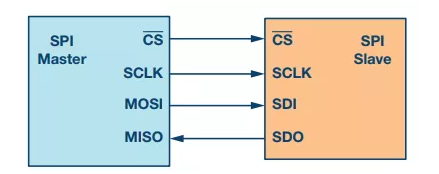
图1. 含主机和从机的SPI配置
来自主机的片选信号用于选择从机。这通常是一个低电平有效信号,拉高时从机与SPI总线断开连接。当使用多个从机时,主机需要为每个从机提供单独的片选信号。本文中的片选信号始终是低电平有效信号。
MOSI和MISO是数据线。MOSI将数据从主机发送到从机,MISO将数据从从机发送到主机。
数据传输
要开始SPI通信,主机必须发送时钟信号,并通过使能CS信号选择从机。片选通常是低电平有效信号。因此,主机必须在该信号上发送逻辑0以选择从机。
SPI是全双工接口,主机和从机可以分别通过MOSI和MISO线路同时发送数据。在SPI通信期间,数据的发送(串行移出到MOSI/SDO总线上)和接收(采样或读入总线(MISO/SDI)上的数据)同时进行。串行时钟沿同步数据的移位和采样。
SPI接口允许用户灵活选择时钟的上升沿或下降沿来采样和/或移位数据。欲确定使用SPI接口传输的数据位数,请参阅器件数据手册。
时钟极性和时钟相位
在 SPI 中,主机可以选择时钟极性和时钟相位。在空闲状态期间,CPOL 为设置时钟信号的极性。空闲状态是指传输开始时 CS 为高电平且在向低电平转变的期间,以及传输结束时 CS 为低电平且在向高电平转变的期间。CPHA 为选择时钟相位。
根据CPHA位的状态,使用时钟上升沿或下降沿来采样和/或移位数据。主机必须根据从机的要求选择时钟极性和时钟相位。根据 CPOL 和 CPHA 位的选择,有四种SPI 模式可用。表1显示了这 4 种 SPI 模式。

表1.通过CPOL和CPHA选择SPI模式
图2至图5显示了四种SPI模式下的通信示例。在这些示例中,数据显示在MOSI和MISO线上。传输的开始和结束用绿色虚线表示,采样边沿用橙色虚线表示,移位边沿用蓝色虚线表示。请注意,这些图形仅供参考。要成功进行SPI通信,用户须参阅产品数据手册并确保满足器件的时序规格。
图2 给出了SPI模式0的时序图。在此模式下,时钟极性为0,表示时钟信号的空闲状态为低电平。此模式下的时钟相位为0,表示数据在上升沿采样(由橙色虚线显示),并且数据在时钟信号的下降沿移出(由蓝色虚线显示)。
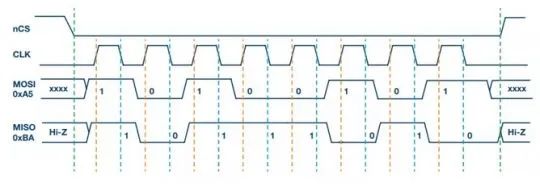
图2. SPI模式0,CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出
图3 给出了SPI模式1的时序图。在此模式下,时钟极性为0,表示时钟信号的空闲状态为低电平。此模式下的时钟相位为1,表示数据在下降沿采样(由橙色虚线显示),并且数据在时钟信号的上升沿移出(由蓝色虚线显示)。
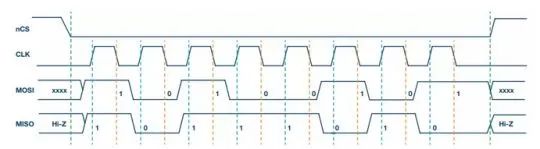
图3. SPI模式1,CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出
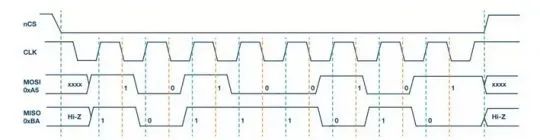
图4. SPI模式2,CPOL = 1,CPHA = 1:CLK空闲状态 = 高电平,数据在下降沿采样,并在上升沿移出
图4 给出了SPI模式2的时序图。在此模式下,时钟极性为1,表示时钟信号的空闲状态为高电平。此模式下的时钟相位为1,表示数据在下降沿采样(由橙色虚线显示),并且数据在时钟信号的上升沿移出(由蓝色虚线显示)。
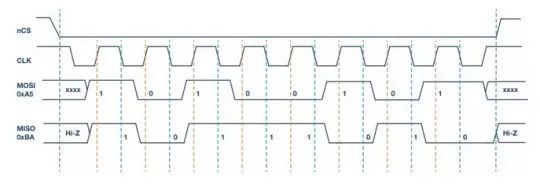
图5. SPI模式3,CPOL = 1,CPHA = 0:CLK空闲状态 = 高电平,数据在上升沿采样,并在下降沿移出
图5 给出了SPI模式3的时序图。在此模式下,时钟极性为1,表示时钟信号的空闲状态为高电平。此模式下的时钟相位为0,表示数据在上升沿采样(由橙色虚线显示),并且数据在时钟信号的下降沿移出(由蓝色虚线显示)。
多从机配置
多个从机可与单个 SPI 主机一起使用。从机可以采用常规模式连接,或采用菊花链模式连接。
常规SPI模式
在常规模式下,主机需要为每个从机提供单独的片选信号。一旦主机使能(拉低)片选信号,MOSI/MISO线上的时钟和数据便可用于所选的从机。如果使能多个片选信号,则MISO线上的数据会被破坏,因为主机无法识别哪个从机正在传输数据。
从图6可以看出,随着从机数量的增加,来自主机的片选线的数量也增加。这会快速增加主机需要提供的输入和输出数量,并限制可以使用的从机数量。可以使用其他技术来增加常规模式下的从机数量,例如使用多路复用器产生片选信号。
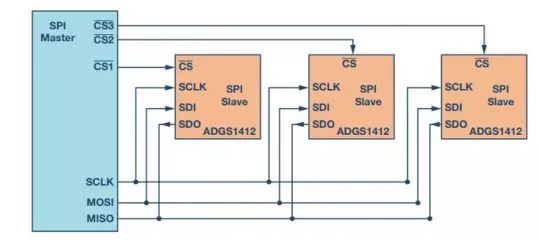
图6. 多从机SPI配置
菊花链模式
在菊花链模式下,所有从机的片选信号连接在一起,数据从一个从机传播到下一个从机。在此配置中,所有从机同时接收同一SPI时钟。来自主机的数据直接送到第一个从机,该从机将数据提供给下一个从机,依此类推。
使用该方法时,由于数据是从一个从机传播到下一个从机,所以传输数据所需的时钟周期数与菊花链中的从机位置成比例。例如在图7所示的8位系统中,为使第3个从机能够获得数据,需要24个时钟脉冲,而常规SPI模式下只需8个时钟脉冲。
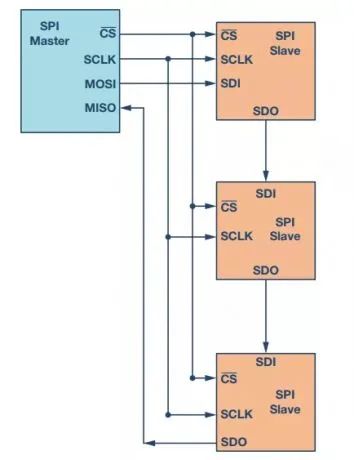
图7. 多从机SPI菊花链配置
图8显示了时钟周期和通过菊花链的数据传播。并非所有SPI器件都支持菊花链模式。请参阅产品数据手册以确认菊花链是否可用。
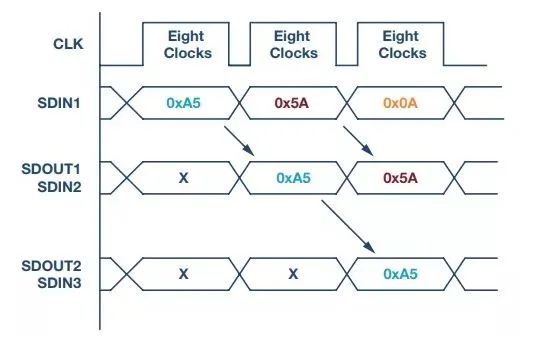
图8. 菊花链配置:数据传播
ADI公司最新一代支持SPI的开关可在不影响精密开关性能的情况下显著节省空间。本文的这一部分将讨论一个案例研究,说明支持SPI的开关或多路复用器如何能够大大简化系统级设计并减少所需的GPIO数量。
ADG1412是一款四通道、单刀单掷(SPST)开关,需要四个GPIO连接到每个开关的控制输入。图9显示了微控制器和一个ADG1412之间的连接。
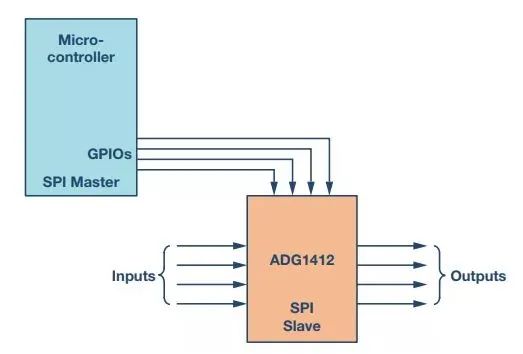
图9. 微控制器GPIO用作开关的控制信号
随着电路板上开关数量的增加,所需GPIO的数量也会显著增加。例如,当设计一个测试仪器系统时,会使用大量开关来增加系统中的通道数。在4×4交叉点矩阵配置中,使用四个ADG1412。此系统需要16个GPIO,限制了标准微控制器中的可用GPIO。图10显示了使用微控制器的16个GPIO连接四个ADG1412。
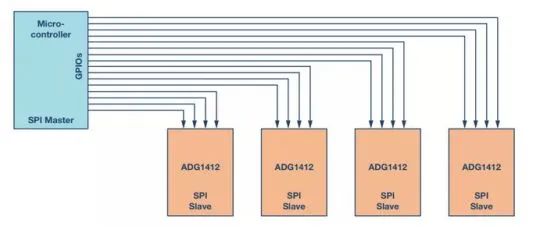
图10. 在多从机配置中,所需GPIO的数量大幅增加
如何减少GPIO数量?
一种方法是使用串行转并行转换器,如图11所示。该器件输出的并行信号可连接到开关控制输入,器件可通过串行接口SPI配置。此方法的缺点是外加器件会导致物料清单增加。
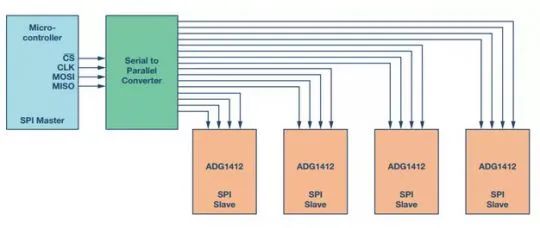
图11. 使用串行转并行转换器的多从机开关
另一种方法是使用SPI控制的开关。此方法的优点是可减少所需GPIO的数量,并且还能消除外加串行转并行转换器的开销。如图12所示,不需要16个微控制器GPIO,只需要7个微控制器GPIO就可以向4个ADGS1412提供SPI信号。开关可采用菊花链配置,以进一步优化GPIO数量。在菊花链配置中,无论系统使用多少开关,都只使用主机(微控制器)的四个GPIO。
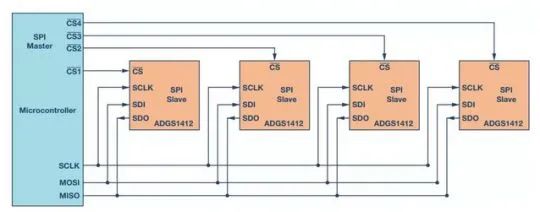
图12. 支持SPI的开关节省微控制器GPIO
图13用于说明目的。ADGS1412数据手册建议在SDO引脚上使用一个上拉电阻。为简单起见,此示例使用了四个开关。随着系统中开关数量的增加,电路板简单和节省空间的优点很重要。
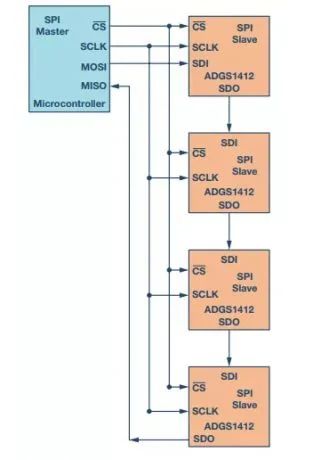
图13. 菊花链配置的SPI开关可进一步优化GPIO
在6层电路板上放置8个四通道SPST开关,采用4×8交叉点配置时,ADI 公司支持 SPI 的开关可节省20%的总电路板空间。
SPI 协议的优缺点
SPI 的优点在于它有着比 I2C 更高的吞吐量,不被最大时钟速度所限制,可实现潜在的高速、极为简单的硬件接口,外围电路使用的上拉电阻是比 I2C 协议更少的,这意味着它具有比I2C的功耗更低、从机的时钟来源来自主机设备,无需新增精密振荡器、从机不需要唯一的地址、相对于并行接口而言,使用的引脚数目大大减少等优点。
但同时有着一定的缺点,例如SPI没有带内寻址、当使用多个不同模式的从机设备时,主机设备切换模式时重新初始化,会使得访问从机设备速度变慢、SPI从机设备没有硬件流控,只能通过主机自主的延迟下个时钟周期到来的时间、仅能在短距离通信等缺点。但能在避免SPI的缺点的方向来应用SPI的话,SPI的优点让它远远优于其他协议。