MEMS技术
微机电系统(MEMS, Micro-Electro-Mechanical System),也叫做微电子机械系统、微系统、微机械等,指尺寸在几毫米乃至更小的高科技装置。微机电系统其内部结构一般在微米甚至纳米量级,是一个独立的智能系统。
微机电系统是在微电子技术(半导体制造技术)基础上发展起来的,融合了光刻、腐蚀、薄膜、LIGA、硅微加工、非硅微加工和精密机械加工等技术制作的高科技电子机械器件。
微机电系统是集微传感器、微执行器、微机械结构、微电源微能源、信号处理和控制电路、高性能电子集成器件、接口、通信等于一体的微型器件或系统。MEMS是一项革命性的新技术,广泛应用于高新技术产业,是一项关系到国家的科技发展、经济繁荣和国防安全的关键技术。
MEMS侧重于超精密机械加工,常见的产品包括MEMS加速度计、MEMS麦克风、微马达、微泵、微振子、MEMS光学传感器、MEMS压力传感器、MEMS陀螺仪、MEMS湿度传感器、MEMS气体传感器等等以及它们的集成产品。
MEMS发展的目标在于,通过微型化、集成化来探索新原理、新功能的元件和系统,开辟一个新技术领域和产业。MEMS可以完成大尺寸机电系统所不能完成的任务,也可嵌入大尺寸系统中,把自动化、智能化和可靠性水平提高到一个新的水平。
概括起来,MEMS具有以下几个基本特点,微型化、智能化、多功能、高集成度和适于大批量生产。MEMS技术的目标是通过系统的微型化、集成化来探索具有新原理、新功能的元件和系统。
以陀螺仪为例,早期的陀螺仪是机械式的,体积很大,想要将其应用于嵌入式系统显然是不可能的,所以就需要利用一些新技术,将这些运动的测量与电子电路相融合,使得体积更小,精度更高,从而能够嵌入芯片之中,实现高度集成化。
几大特点
✔微型化
MEMS器件体积小,重量轻,耗能低,惯性小,谐振频率高,响应时间短。MEMS系统与一般的机械系统相比,不仅体积缩小,而且在力学原理和运动学原理,材料特性、加工、测量和控制等方面都将发生变化。在MEMS系统中,所有的几何变形是如此之小(分子级),以至于结构内应力与应变之间的线性关系(虎克定律)已不存在。MEMS器件中摩擦表面的摩擦力主要是由于表面之间的分子相互作用力引起的,而不是由于载荷压力引起。MEMS器件以硅为主要材料。硅的强度、硬度和杨氏模量与铁相当。密度类似于铝,热传导率接近铜和钨,因此MEMS器件机械电气性能优良。
✔批量生产
MEMS采用类似集成电路(IC)的生产工艺和加工过程,用硅微加工工艺在一硅片上可同时制造成百上千个微型机电装置或完整的MEMS。使MEMS有极高的自动化程度,批量生产可大大降低生产成本;而且地球表层硅的含量为2%。几乎取之不尽,因此MEMS产品在经济性方面更具竞争力。
✔集成化
MEMS可以把不同功能、不同敏感方向或制动方向的多个传感器或执行器集成于一体,或形成微传感器阵列和微执行器阵列。甚至把多种功能的器件集成在一起,形成复杂的微系统。微传感器、微执行器和微电子器件的集成可制造出高可靠性和稳定性的微型机电系统。
看到这里不得不感慨一下,真是术业有专攻,隔行如隔山呀!
MEMS的发展离不开对力学的研究。
刚体力学
刚体:指的是在任何情况下,形状和大小都不会发生任何变化的物体。
刚体力学,是研究刚体在受力状态下运动(包括静止)规律的学科。按运动状态的不同,可分为刚体动力学、刚体静力学,以及研究质点运动的质点力学等。
具体内容在大学物理课程中。
可参考这篇PPT《刚体力学》
刚体力学比较复杂,一时半儿没法熟悉,先了解几个概念
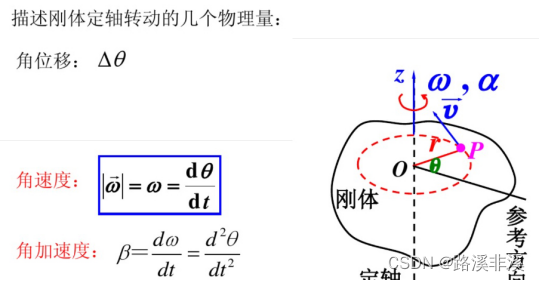
刚体的转动
角位移、角速度、角加速度
其他的以后有需要再说吧,先不花时间在这上面了。

陀螺仪
MEMS陀螺仪和MEMS加速度计都属于一种MEMS惯性传感器。
具体参考:MEMS惯性传感器——万物姿态测控新技-电子发烧友网
我们知道MPU6050里面有个三轴陀螺仪,这里面的陀螺仪是MEMS陀螺仪。
为了更循序渐进地理解陀螺仪的工作原理,我们先认识下最开始的机械陀螺仪。
参考:
陀螺仪的工作原理 陀螺仪和重力传感器有何区别 - MEMS/传感技术 - 电子发烧友网
陀螺仪,又叫角速度传感器。
认识陀螺仪之前,我们先来认识下陀螺。
据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,因此傅科用希腊字 gyro(旋转)和skopein(看)两字合为“gyro scopei ”一字来命名该仪器仪表。
我们小时候经常玩陀螺,理论上,任何刚体都能成为一个陀螺,比如拿个瓶子,让它在地上快速旋转,速度越快,质量越大,则转动得越稳定。
陀螺有两大特性,即定轴性和进动性,具体参考:
陀螺进动和陀螺仪_哔哩哔哩_bilibili
根据这种特性,将陀螺安装在框架装置上,使陀螺的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
高速转动的陀螺,即中间的旋转轮,会保持一个固定的朝向,可以作为参考坐标,当整个陀螺仪发生三维运动时,就可以结合一些外围部件检测出三个方向上相对于参考坐标所旋转或者倾斜的角度,其实就是几个环所转过的角度。
陀螺仪的基本部件有:
陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值);
内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);
附件(是指力矩马达、信号传感器等)。
当然,现代芯片中的陀螺仪肯定不会是这种机械陀螺仪,而是MEMS陀螺仪。
作用一样,也是测量各个轴上的角速度,从而积分后得到欧拉角(至少MPU6050是这样的),然后根据欧拉角来计算物体的姿态。
采用半导体MEMS加工工艺制造的MEMS陀螺仪以科里奥利(Coriolis)效应为基本工作原理。可动质量块在驱动电路控制下高速震荡,当物体转动时,质量块发生垂直于震荡方向的横向位移,横向位移的大小与输入角速率的大小成正比,通过测量横向位移实现对角速率的测量,从而实现MEMS陀螺仪的主要功能。为了使MEMS陀螺仪正常工作,需要驱动MEMS结构中的可动质量块做高速震荡,驱动方式主要有静电式、压电式和电磁式。振幅检测方式分为电容检测、压电检测、压阻式检测、光学检测等。
参考:
陀螺仪的工作原理⚡ 陀螺仪是什么_哔哩哔哩_bilibili
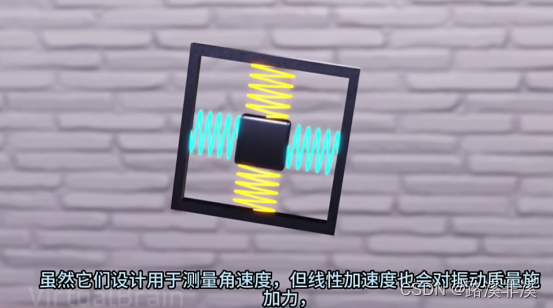
MEMS陀螺仪震动的示意图如下:
虽然它们设计用于测量角速度,但存在一个缺点,那就是线性加速度也会对震动质量施加力,因此,如果系统受到大的加速度,它们的准确性将会受到影响。
所以,MPU6050内部也集成了三轴加速度计,可以结合陀螺仪的姿态进行姿态融合,从而提高姿态的准确度。



加速度计
最原始的加速度计,就是一个弹簧、一个重物,再标上刻度:
简简单单,却蕴含着一种神秘的真理,利用的就是胡克定律和牛顿第二定律F=ma等物理学原理。
后来,人们发明了很多方式来测量加速度,但基本宗旨是将其加速度转换为电能,我们将这种测量设备,称为“加速度计”。
现代芯片中使用的是MEMS加速度计
加速度计定义为“用于测量加速度或用于检测和测量振动的仪器 ”。
很好,但实际上并不能给我们太多信息。从最基本的意义上讲,加速度计是测量加速度的机电设备,因此得名。
这些力可以是静态的(如重力),也可以是动态的(由移动或振动设备引起)。多数使用压电效应或通过感应电容来制作加速度计的方法多种多样。
前者往往由微观晶体结构组成,这些晶体结构会受到加速力的作用,并产生电压作为回报。后者利用彼此相邻放置的两个微结构。
每个都有一定的电容,随着加速力使结构之一移动,其电容将发生变化。通过设置一些电路将电容转换为电压,您将获得一个非常有用的小加速度计。
本质上,陀螺仪和加速度计两者之间的主要区别在于,一个可以感知旋转,而另一个则不能。由于陀螺仪通过角动量原理工作,因此非常适合帮助指示物体在空间中的方向。另一方面,加速度计只能基于振动来测量线性加速度。更多内容可参考:陀螺仪是什么,它们如何工作以及其重要性-贤集网
可参考:《加速度计》

磁力计
磁力计(Magnetic、M-Sensor)也叫地磁、磁感器,可用于测试磁场强度和方向,定位设备的方位,磁力计的原理跟指南针原理类似,可以测量出当前设备与东南西北四个方向上的夹角。
由于地球重力场相当于已知信息,因而当载体处于平稳运动时,完全可以依靠采集自加表的测量信息来推算得到载体除了航向外的其它两个姿态信息,而若将加表与其它传感器如磁力计结合使用,就能实现在多种运动情况下测得完整的载体姿态信息。
暂且做个简单了解,具体参考百度百科:
磁力计_百度百科
MPU6050主要使用陀螺仪和加速度计,磁力计仅作简单了解即可。







![2024 年 7 款最佳电脑录屏软件 [免费和付费]](https://img-blog.csdnimg.cn/img_convert/d3c1f1132379ab3af11a7bd052fd604f.webp?x-oss-process=image/format,png)