目录
一、RT-Thread简介
1.1 简介
1.2 功能特点
1.3 发展历史
1.4 应用场合
1.5 与Linux的比较
1.6 RT-Thread优缺点
二、技术架构
2.1 分层架构编辑
2.2 功能组件
2.3 应用程序接口RT-Thread API
2.4 应用程序接口:RT-Thread API、POSIX API
2.5 应用程序接口:RT-Thread API、C++接口
三、附录
3.1 POSIX API
3.2 RT-Thread API功能函数
一、RT-Thread简介
1.1 简介
RT-Thread 是一款主要由中国开源社区主导开发的开源实时操作系统(v3.1.0以及以前版本遵循GPLv2+许可协议,v3.1.0以后版本遵循 Apache License 2.0 开源许可协议)。实时线程操作系统不仅仅是一个单一的实时操作系统内核,它也是一个完整的应用系统,包含了实时、嵌入式系统相关的各个组件:TCP/IP协议栈,libc接口,图形用户界面等。
1.2 功能特点
RT-Thread(Real-Time Thread)是一款开源的实时操作系统(RTOS),专为嵌入式系统设计。它具有精简、高效和可裁剪的特点,适用于各种资源受限的嵌入式应用。
以下是关于RT-Thread的一些重要特点和功能:
-
实时性和可裁剪性:RT-Thread专注于实时性能,具有快速的任务切换和响应时间。它还支持模块化设计,可以根据应用需求裁剪和加载特定的组件,以减小内存占用和系统开销。
-
多任务调度:RT-Thread支持多任务并发执行,可以创建和管理多个任务,实现任务之间的切换和调度。它提供了多种调度策略和优先级管理方式,满足不同应用的需求。
-
丰富的通信机制:RT-Thread提供了多种通信机制,如信号量、邮箱、消息队列和事件标志等,用于实现任务间的同步和通信。这些机制可以帮助开发人员构建复杂的系统。
-
设备驱动支持:RT-Thread提供了统一的设备驱动框架,支持许多常见外设和传感器的驱动,包括串口、SPI、I2C、GPIO等。同时,RT-Thread还提供了灵活的文件系统接口,使开发者能够轻松访问外部存储设备。
-
网络协议栈支持:RT-Thread支持多种网络协议栈,如TCP/IP、HTTP、FTP等,使嵌入式系统能够通过网络进行通信和数据传输。这使得RT-Thread适用于物联网和远程通信应用。
-
开发工具和生态系统支持:RT-Thread支持多种开发工具链和集成开发环境(IDE),如GCC、IAR、Keil等。它还有活跃的社区支持,提供丰富的文档、示例代码和第三方扩展,方便开发者学习和使用。
总的来说,RT-Thread是一个灵活、可靠且易于使用的嵌入式实时操作系统。它适用于各种资源受限的嵌入式应用,包括工业控制、智能家居、物联网和嵌入式设备等领域。通过使用RT-Thread,开发者可以更高效地构建嵌入式系统,并满足实时性和可裁剪性的需求。
1.3 发展历史
RT-Thread(Real-Time Thread)是一款由中国开发的开源实时操作系统,其发展历史可以追溯到2006年。以下是RT-Thread的主要发展里程碑:
-
2006年:RT-Thread项目启动。
- RT-Thread由中国开源社区推动,旨在提供一款适用于嵌入式应用的实时操作系统。
-
2008年:RT-Thread v0.1版本发布。
- RT-Thread的首个版本发布,具有基本的任务调度和通信机制。
-
2010年:RT-Thread推出了RT-Thread Studio。
- RT-Thread Studio是一款集成开发环境(IDE),旨在简化RT-Thread的开发和调试过程。
-
2012年:RT-Thread v2.0版本发布。
- RT-Thread v2.0引入了新的内核架构和组件化设计,提供了更好的扩展性和灵活性。
-
2015年:RT-Thread引入了RT-Thread Nano架构。
- RT-Thread Nano是一种特殊版本,针对资源受限的嵌入式系统进行了优化,具有更小的内存占用和简化的内核功能。
-
2016年:RT-Thread进入Apache孵化器。
- RT-Thread进入Apache软件基金会孵化器,获得了更广泛的社区支持。
-
2020年:RT-Thread v4.0版本发布。
- RT-Thread v4.0是目前最新版本,引入了全新的内核架构和功能,提供了更高的实时性和可扩展性。
随着时间的推移,RT-Thread逐渐成长为一款受欢迎的开源实时操作系统,并在嵌入式系统领域得到广泛应用。它在国内外得到了许多开发者和社区的支持,并不断演进和改进。目前,RT-Thread继续保持着活跃的开发和更新,为嵌入式开发者提供了一个可靠的选择。
1.4 应用场合
RT-Thread适用于各种资源受限的嵌入式应用场合,包括但不限于以下领域:
-
工业控制系统:RT-Thread可以用于工业控制领域,例如自动化生产线、机器人控制、PLC等。它具有实时性和可裁剪性,在这些场景中能够满足对实时性和可靠性的要求。
-
智能家居:随着智能家居市场的发展,RT-Thread可以用于控制和管理各种家居设备,如智能灯光、温度控制、智能门锁等。它支持多任务调度和通信机制,能够实现不同设备之间的协同工作。
-
物联网设备:RT-Thread适用于物联网设备,如传感器节点、边缘计算设备、无线通信模块等。它具有轻量级和低功耗的特点,适合于长时间运行且资源有限的设备。
-
嵌入式系统:RT-Thread可以用于各种嵌入式系统,如嵌入式控制器、嵌入式电子设备、嵌入式通信设备等。它提供了丰富的设备驱动支持和通信接口,方便开发者进行硬件控制和数据交互。
-
车载系统:RT-Thread可以用于汽车和交通系统中,例如车载娱乐系统、车载控制单元、车载通信设备等。它具备实时性和可靠性,能够满足对车辆电子系统的高要求。
-
医疗设备:RT-Thread可以应用于医疗设备,如医疗监测仪器、便携式医疗设备、医疗传感器等。它的实时性和可裁剪性使其能够实现医疗数据的准确采集和处理。
总而言之,RT-Thread适用于各种对实时性、可裁剪性和资源优化要求较高的嵌入式应用场合。无论是在工业控制、智能家居、物联网设备还是其他嵌入式系统中,RT-Thread都可以提供可靠的操作系统基础,帮助开发者构建高效稳定的嵌入式系统。
1.5 与Linux的比较
RT-Thread和Linux是两种不同类型的操作系统,适用于不同的应用场景。下面是RT-Thread和Linux之间的一些比较:
-
大小和资源消耗:RT-Thread是一款轻量级的实时操作系统,它的内核尺寸和资源消耗相对较小,适用于资源受限的嵌入式系统。相比之下,Linux是一款较为庞大的操作系统,通常需要更多的硬件资源。
-
实时性能:RT-Thread专注于实时性能,具有快速的任务切换和低延迟的特点,可以满足对实时性要求较高的应用。而Linux的实时性能相对较差,无法保证严格的实时响应。
-
可裁剪性:RT-Thread支持模块化设计和可裁剪性,可以根据应用需求选择和加载特定的组件和功能。相比之下,Linux通常以完整的系统形态提供,难以精确地裁剪到仅包含必要的组件。
-
设备支持:Linux拥有庞大的设备驱动支持,涵盖了广泛的硬件设备和外设。RT-Thread也提供了一定的设备驱动支持,但相对较小,通常需要根据具体硬件匹配或自行开发驱动。
-
生态系统和开发工具:Linux拥有庞大的开源社区和丰富的生态系统,提供了众多的开发工具、库和应用程序。RT-Thread虽然也有活跃的社区支持,但其生态系统相对较小。
综上所述,RT-Thread和Linux在设计理念、目标应用和特性方面存在差异。RT-Thread专注于实时性和轻量级设计,适用于资源受限的嵌入式系统。而Linux是一个功能强大的通用操作系统,适用于桌面、服务器和高性能应用。在选择操作系统时,需要根据具体应用需求和硬件资源进行权衡和选择。
1.6 RT-Thread优缺点
RT-Thread是一个开源的实时操作系统(RTOS),它针对嵌入式设备和物联网应用进行了优化。以下是RT-Thread的一些优点和缺点:
优点:
- 简洁轻量:RT-Thread具有小巧的内核和代码库,所需的存储空间和资源消耗较少,适合于资源受限的嵌入式设备。
- 实时性能:RT-Thread支持多任务和实时调度机制,可以满足对任务响应时间要求较高的应用场景。
- 开源社区:RT-Thread拥有活跃的开源社区,提供了广泛的文档和支持资源,用户可以方便地获取帮助和分享经验。
- 可裁剪性:RT-Thread的模块化设计使用户可以根据实际需求选择性地添加或移除特定功能,以精简系统的大小和复杂性。
- 多架构支持:RT-Thread支持多种常用的处理器架构,包括ARM、MIPS、X86等,使其适用于不同硬件平台。
缺点:
- 生态系统相对较小:相比于一些主流RTOS,RT-Thread的生态系统相对较小,可能在某些领域的支持、工具和库的选择上相对有限。
- 开发门槛较高:RT-Thread使用C语言进行开发,需要一定的嵌入式开发经验和技能。对于初学者来说,可能需要一些时间来学习和掌握相关知识。
- 缺乏成熟的商业支持:相对于一些商业RTOS,RT-Thread在商业支持方面可能会有一些不足,对于一些关键项目来说,可能需要额外的支持和保障。
二、技术架构
2.1 分层架构
佛
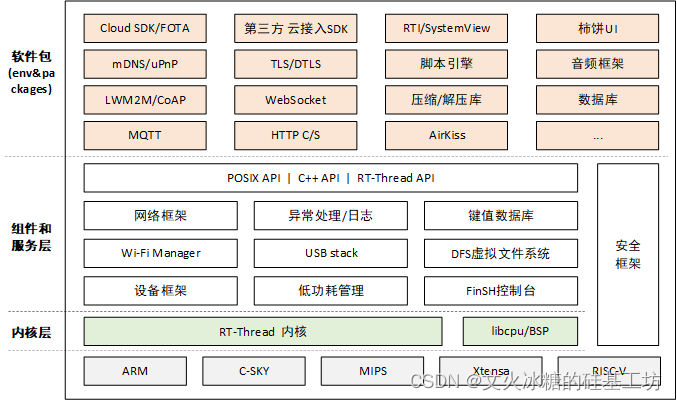
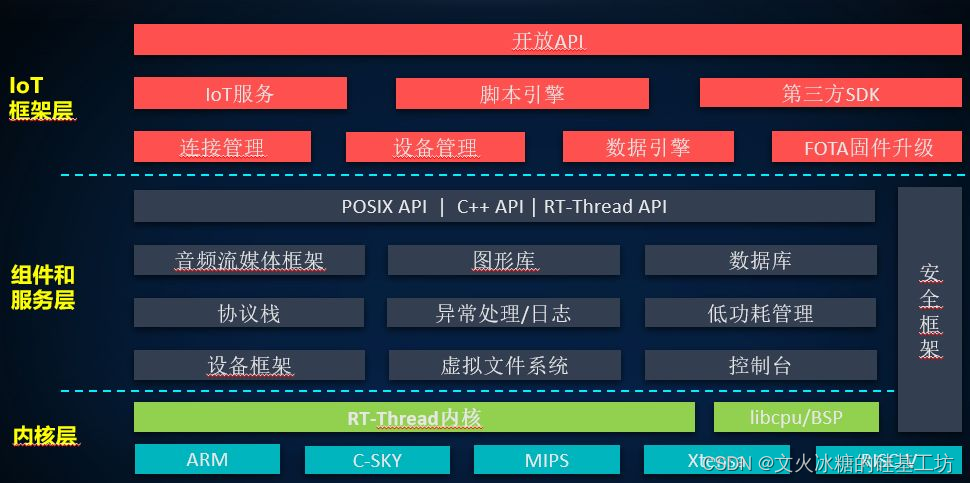
RT-Thread内核的技术架构可以分为以下几个层次:
-
应用层:应用层是RT-Thread的最上层,开发者可以在这个层次上进行应用程序的开发。它包括了用户自定义的任务、线程、驱动、应用代码等,用于处理具体的业务逻辑和功能。
-
RTOS内核层:RTOS内核层是RT-Thread的核心部分,它提供了任务调度、任务管理、内存管理、中断管理、线程同步等基本的操作系统功能。这个层次包括了任务调度器、内存管理器、时钟驱动、中断处理等核心模块,并提供了与应用层的接口。
-
HAL层:HAL(Hardware Abstraction Layer)层是RT-Thread与硬件之间的抽象层,用于屏蔽硬件差异,提供统一的接口供上层调用。这个层次包含了硬件驱动、外设驱动、通信协议栈等,用于访问和控制硬件设备。
-
BSP层:BSP(Board Support Package)层是针对具体硬件平台的支持包,包括了硬件初始化、外设配置、中断向量表等。它是RT-Thread与具体硬件平台交互的桥梁,确保RT-Thread能在特定的硬件环境下运行。
-
设备驱动层:设备驱动层提供了对各种硬件设备的驱动支持,包括串口、GPIO、SPI、I2C等外设驱动。这个层次负责与硬件之间的通信和控制,为上层提供设备访问的接口。
整体而言,RT-Thread采用了模块化的设计理念,不同的功能模块相互交互,形成完整的技术架构。通过分层设计和模块化的特点,RT-Thread实现了较好的可裁剪性和灵活性,使开发者能够针对具体应用需求选择和配置核心功能模块,并与硬件平台无缝集成。
2.2 功能组件
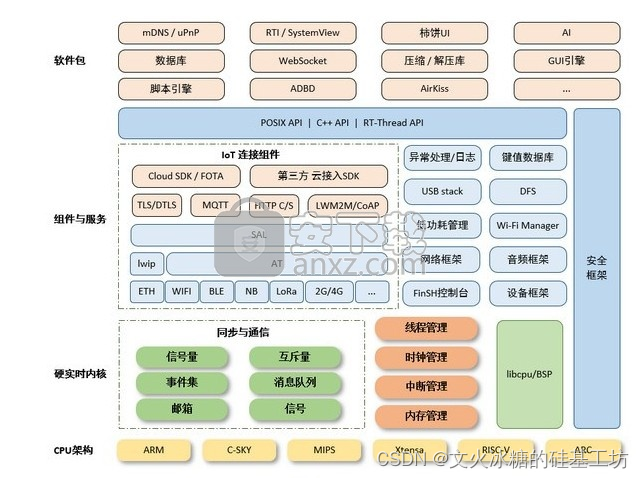
RT-Thread提供了丰富的功能组件,用于满足不同应用场景的需求。
以下是一些常用的RT-Thread功能组件:
-
任务调度器:负责任务的创建、切换和调度,保证任务按照优先级和时间片进行执行。
-
时钟管理:提供定时器功能,可以实现延时、定时等操作。
-
内存管理:包括动态内存管理和静态内存管理,用于有效地分配和释放内存资源。
-
任务通信:提供了多种任务间通信的机制,如信号量、消息队列、邮箱等,用于实现任务间的数据交换和同步。
-
设备驱动框架:支持多种硬件设备的驱动开发和管理,包括串口、GPIO、SPI、I2C等。
-
文件系统:提供了多种文件系统的支持,如FAT文件系统、YAFFS文件系统等,方便对外部存储设备进行读写操作。
-
网络协议栈:支持多种网络协议和通信方式,如TCP/IP协议栈、UDP协议等,提供网络连接和数据传输的功能。
-
其他常用组件:包括定时器、信号量、事件、锁、消息队列等,用于实现常见的多线程应用程序设计。
这些功能组件可以根据实际需求进行选择和配置,使RT-Thread具备适应不同应用场景的能力。开发者可以根据具体应用需求和硬件环境,选择合适的功能组件进行开发和集成。此外,RT-Thread还有丰富的第三方组件和插件,可以进一步扩展其功能和应用范围。
2.3 应用程序接口RT-Thread API
RT-Thread提供了一系列的API,用于开发应用程序。以下是一些常用的RT-Thread API:
- 线程管理API:
rt_thread_t rt_thread_create(const char *name, void (*entry)(void *parameter), void *parameter, size_t stack_size, rt_uint8_t priority): 创建线程。rt_err_t rt_thread_startup(rt_thread_t thread): 启动线程。rt_err_t rt_thread_delete(rt_thread_t thread): 删除线程。void rt_thread_yield(): 主动放弃CPU,使其他线程有机会执行。
- 信号量API:
rt_sem_t rt_sem_create(const char *name, rt_uint32_t value, rt_uint8_t flag): 创建信号量。rt_err_t rt_sem_take(rt_sem_t sem, rt_int32_t timeout): 获取信号量,如果没有可用的信号量,则会阻塞等待。rt_err_t rt_sem_release(rt_sem_t sem): 释放信号量。
- 消息队列API:
rt_mq_t rt_mq_create(const char *name, rt_size_t msg_size, rt_size_t pool_size, rt_uint8_t flag): 创建消息队列。rt_err_t rt_mq_send(rt_mq_t mq, void *buffer, rt_size_t size): 向消息队列发送消息。rt_err_t rt_mq_recv(rt_mq_t mq, void *buffer, rt_size_t size, rt_int32_t timeout): 从消息队列接收消息。
- 定时器API:
rt_timer_t rt_timer_create(const char *name, void (*timeout_func)(void *parameter), void *parameter, rt_tick_t time, rt_uint8_t flag): 创建定时器。rt_err_t rt_timer_start(rt_timer_t timer): 启动定时器。rt_err_t rt_timer_stop(rt_timer_t timer): 停止定时器。
- 内存管理API:
void *rt_malloc(rt_size_t size): 动态分配内存。void rt_free(void *ptr): 释放内存。
这些仅是一部分RT-Thread API,还有很多其他的API,涵盖了线程同步、事件、互斥锁、文件系统、网络等方面。开发者可以根据需求查阅RT-Thread的文档,了解和使用更多的API。
2.4 应用程序接口:RT-Thread API、POSIX API
T-Thread从版本3.0开始提供了对POSIX接口的支持。在此版本之前,RT-Thread并没有完全兼容POSIX标准接口。从RT-Thread 3.0版本开始,引入了对POSIX线程、进程、信号量、消息队列、互斥锁等功能的支持。
这个版本的引入为开发者提供了更多选择,使得在RT-Thread上进行应用程序开发更加便捷和可移植。同时,值得注意的是,RT-Thread对POSIX接口的实现可能与标准POSIX接口有一些差异或限制,因此在使用中需要注意相关的文档和规范。
RT-Thread API、POSIX API和C++ API是三种不同的应用程序接口,适用于不同的开发环境和需求。
-
RT-Thread API:
- RT-Thread API是RT-Thread操作系统提供的一套API接口。
- RT-Thread API适用于嵌入式系统和资源受限环境的应用程序开发。
- 提供了线程管理、信号量、消息队列、定时器等功能的API接口。
- RT-Thread API通常更加轻量级和高效,针对RT-Thread操作系统进行设计和优化。
-
POSIX API:
- POSIX API是一套面向操作系统的标准接口,用于可移植操作系统接口。
- POSIX API定义了通用的API规范,使得应用程序可以在符合POSIX标准的操作系统上进行开发和移植。
- 提供了线程、进程、文件操作、信号量、消息队列、定时器等功能的接口。
- POSIX API更加通用和标准化,适用于各种操作系统和平台。
-
C++ API:
- C++ API是C++编程语言自身所提供的接口。
- C++ API包括了面向对象的编程特性,如类、继承、封装等。
- 通过C++标准库和其他扩展库,C++ API提供了丰富的功能,如字符串处理、容器、算法、多线程等。
- C++ API适用于使用C++语言进行面向对象编程的应用程序开发。
综上所述,RT-Thread API适用于嵌入式系统和资源受限环境的开发,POSIX API适用于可移植操作系统接口开发,而C++ API适用于使用C++语言进行面向对象编程的应用程序开发。根据具体的开发需求和环境,选择合适的接口进行开发。
2.5 应用程序接口:RT-Thread API、C++接口
截至目前(2024年2月),RT-Thread操作系统并没有官方支持C++应用程序接口(C++ API)的版本。RT-Thread主要是面向C语言开发的嵌入式实时操作系统,其主要提供C语言的应用程序接口(RT-Thread API)。
虽然RT-Thread本身不提供官方的C++ API支持,但你仍然可以在RT-Thread上使用C++来进行应用程序开发。你可以在C++的编译环境下,使用C++的语法和特性编写应用程序代码,并利用RT-Thread的C语言接口进行底层操作和调用。
需要注意的是,用C++开发RT-Thread应用程序时,你需要确保该C++编译器与RT-Thread操作系统之间的兼容性,并避免使用不支持的C++特性和库。此外,还需要仔细阅读RT-Thread官方文档,了解RT-Thread API的使用方式和限制,以确保正确地集成和调用RT-Thread提供的底层功能。
三、附录
3.1 POSIX API
POSIX API(Portable Operating System Interface)是一套标准的操作系统接口,旨在提供在不同的Unix-like操作系统上编写可移植应用程序的一致性和可移植性。
POSIX API 定义了许多函数、常量和数据结构,可以与操作系统进行交互并执行各种操作。这些操作包括文件和目录的创建、打开、读取和写入、进程和线程的管理、信号的处理、网络通信等。
以下是 POSIX API 的一些重要的功能和相关的头文件:
-
文件操作:
- 打开、关闭和创建文件:
open()、close()、creat() - 读取和写入文件内容:
read()、write() - 文件位置操作:
lseek() - 文件和目录的操作:
unlink()、mkdir() - 文件权限设置:
chmod()
- 打开、关闭和创建文件:
-
进程和线程管理:
- 创建和执行新进程:
fork()、exec() - 等待子进程结束:
waitpid() - 线程创建和同步:
pthread_create()、pthread_join() - 进程和线程的身份认证:
getuid()、getgid()
- 创建和执行新进程:
-
系统和时间调用:
- 获取系统时间:
time() - 睡眠:
sleep()、usleep() - 定时器:
timer_create()、timer_settime()
- 获取系统时间:
-
信号处理:
- 注册和处理信号:
signal()、sigaction() - 发送信号:
kill()
- 注册和处理信号:
-
网络编程:
- 套接字创建和通信:
socket()、bind()、connect()、recv()、send() - 服务器和客户端通信:
listen()、accept()
- 套接字创建和通信:
POSIX API 的相关函数和数据结构通常在 <unistd.h>、<fcntl.h>、<sys/types.h>、<sys/socket.h> 和其他头文件中定义。在编写使用 POSIX API 的应用程序时,需要包含适当的头文件并链接相应的库。
3.2 RT-Thread API功能函数
RT-Thread API 包含了许多功能函数,用于实现各种嵌入式应用程序的需求。以下是一些常用的 RT-Thread API 功能函数的详解:
- 线程(thread)API 功能函数:
-
rt_thread_t rt_thread_create(const char* name, void (*entry)(void* parameter), void* parameter, rt_uint32_t stack_size, rt_uint8_t priority, rt_uint32_t tick):创建一个线程,接受线程名称、线程入口函数、入口函数参数、堆栈大小、优先级和时间片信息作为参数。 -
rt_err_t rt_thread_startup(rt_thread_t thread):启动一个创建好的线程,使其开始运行。 -
void rt_thread_delay(rt_tick_t tick):使当前线程进入延时状态,延时时间为指定的时钟节拍数。 -
rt_err_t rt_thread_suspend(rt_thread_t thread):挂起指定的线程,使其暂停运行。 -
rt_err_t rt_thread_resume(rt_thread_t thread):恢复指定的线程,使其继续运行。 -
rt_err_t rt_thread_detach(rt_thread_t thread):将线程设置为脱离状态,让其在执行完入口函数后自动释放线程资源。
- 互斥锁(mutex)API 功能函数:
-
rt_err_t rt_mutex_init(rt_mutex_t *mutex, const char *name, rt_uint8_t flag):初始化互斥锁,参数包括互斥锁指针、名称以及标志位。 -
rt_err_t rt_mutex_take(rt_mutex_t mutex, rt_int32_t timeout):尝试获取互斥锁,如果获取失败则阻塞当前线程。 -
rt_err_t rt_mutex_release(rt_mutex_t mutex):释放互斥锁,允许其他线程获取该锁。
- 信号量(semaphore)API 功能函数:
-
rt_err_t rt_sem_init(rt_sem_t *semaphore, const char *name, rt_uint16_t value, rt_uint8_t flag):初始化信号量,参数包括信号量指针、名称、初始值以及标志位。 -
rt_err_t rt_sem_take(rt_sem_t semaphore, rt_int32_t timeout):尝试获取信号量,如果获取失败则阻塞当前线程。 -
rt_err_t rt_sem_release(rt_sem_t semaphore):释放信号量,增加其计数值,允许其他线程获取该信号量。
- 邮箱(mailbox)API 功能函数:
-
rt_err_t rt_mb_init(rt_mailbox_t *mailbox, const char *name, void **msgpool, rt_uint16_t size, rt_uint8_t flag):初始化邮箱,参数包括邮箱指针、名称、消息池、消息池大小以及标志位。 -
rt_err_t rt_mb_send(rt_mailbox_t mailbox, rt_ubase_t value):向邮箱发送消息,发送的消息为一个无符号整数。 -
rt_err_t rt_mb_recv(rt_mailbox_t mailbox, rt_ubase_t *value, rt_int32_t timeout):从邮箱接收消息,可以设定超时时间。
这些是 RT-Thread API 中的一部分常用功能函数,提供了线程管理、同步与通信、内存管理等基础功能。具体使用方式和更多功能函数可参考 RT-Thread 的官方文档和示例代码。