相关阅读
静态时序分析![]() https://blog.csdn.net/weixin_45791458/category_12567571.html?spm=1001.2014.3001.5482
https://blog.csdn.net/weixin_45791458/category_12567571.html?spm=1001.2014.3001.5482
在上文中,我们不建议使用set_drive命令而是使用set_driving_cell命令,这是一个描述输入端口驱动能力更精确的方法。因为大多数情况下,只有库单元的设计者熟悉单元门内部的输出电阻情况,因此直接指定驱动单元而不是指定驱动电阻更容易。
该指令的BNF范式(有关BNF范式,可以参考以往文章)为:
set_driving_cell[-lib_cell lib_cell_name] [-library lib][-rise] [-fall] [-min] [-max][-pin pin_name] [-from_pin from_pin_name][-dont_scale] [-no_design_rule][-none][-input_transition_rise rtran][-input_transition_fall ftran][-multiply_by factor] port_list指定驱动单元名称
-lib_cell选项用于指定驱动输入端口的单元,当单元的输出端口不只一个时,可以使用-pin选项指定输出引脚。默认情况下,set_driving_cell命令在链接库中搜索单元。
指定端口列表
指定一个端口列表,包含输入端口或输入输出双向端口,如果有多于一个端口,需要使用引号或大括号包围。
简单使用
以图1所示的电路图为例,首先在输入端口clk定义一个时钟。
create_clock -period 10 [get_port clk]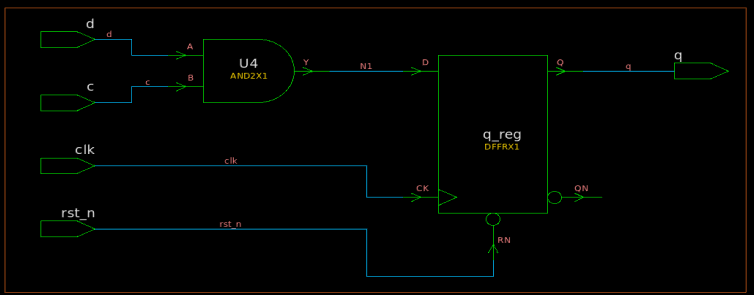
图1 一个简单的例子
接着在输入端口d、c上分别定义两个输入延迟,参考时钟为clk。
set_input_delay 0.5 -clock clk [get_port d]
set_input_delay 0.5 -clock clk [get_port c]假设在我们的库中有一个叫做CLKINVX1的反相器,使用下面的命令指定输入端口d的驱动单元为CLKINVX1。
set_driving_cell -lib_cell CLKINVX1 [get_port d]使用这个命令时,会产生一个警告,如下所示,后面的小节我们会解释原因。
Warning: Design rule attributes from the driving cell will be set on the port. (UID-401)现在可以使用report_port -verbose命令报告输入端口的驱动情况了,如图2所示。

图2 端口驱动单元报告
最后使用report_timing命令分别报告输入端口d到触发器的时序路径,记得使用-transition_time选项,结果如图2所示。

图3 输入端口d的建立时间时序报告
可以看到,此时输入端口d的转换时间是0.0191175,并且带来了0.0045136的额外输入延迟,这是不包括在输入延迟(input external delay)中的。
延迟和转换时间计算原理
那么这些数据是如何计算出来的呢,我们可以以图4的电路图为例做个实验。

图4 一个简单的实验
根据lib文件中的信息,我们使用set_load命令给输出端口d加上0.001494的负载,这是为了模拟图一中U4单元的输入引脚A的电容。
set_load 0.001494 [get_port d]接着使用report_delay_calculation命令,就可以知道U2的单元延迟和转换时间的计算情况了,如图5、图6所示。
report_delay_calculation -from [get_pin U2/A] -to [get_pin U2/Y]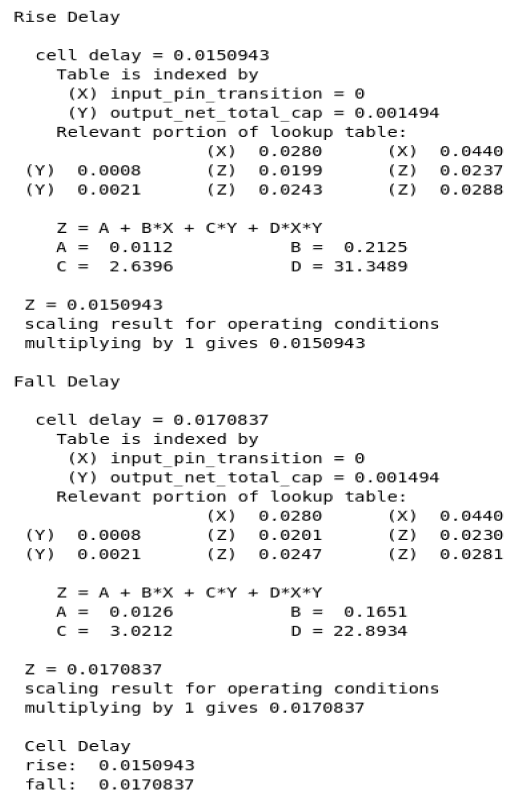
图5 CLKINVX1的有负载延迟计算情况
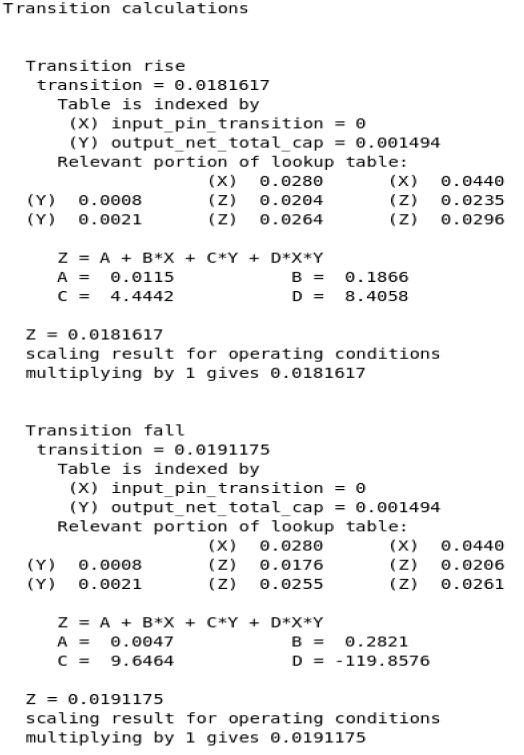
图6 CLKINVX1的有负载转换时间计算情况
对比图6与图3可以发现,转换时间的计算方式确实是直接通过非线性延迟模型(NLDM)计算得出。而且我们可以看到,尽管使用了反相器CLKINVX1作为驱动单元,input_external_delay和输入端口d的边沿都是下降沿,这是因为input_external_delay是从输入端口d的边沿反推回去得到的边沿,也就是说时序报告中没有指明驱动单元的输入极性,但是它可以被指定,后面的小节会说明。
但是还有一个很奇怪的事情,图3中的延迟值0.0045136却和图5中的延迟计算结果0.0170837不同,这是因为这个延迟的计算方式为loaded driving_cell delay - unloaded driving_cell delay,即带负载延迟减去零负载延迟,因此是0.0170837减去零负载延迟。
我们可以继续在图4中模拟这种情况,即使用remove_load命令把负载去除,延迟计算结果如图7所示。
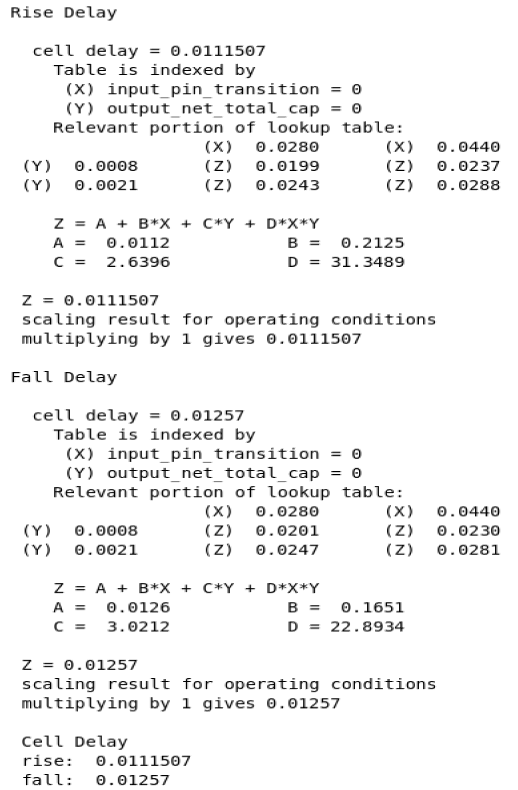
图7 CLKINVX1的无负载延迟计算情况
可以看出, 0.0170837-0.01257确实是0.0145137约等于0.0045136(这是因为四舍五入的问题)。
PS:其实可以直接使用report_delay_calculation -from [get_port d] -to [get_port d]命令报告驱动单元的延迟和转换时间计算情况。
指定库名
-library选项指定了在哪些链接库中搜索单元。在不使用-library的情况下,DC首先会在所有链接库中与输入端口的操作条件(operating conditions)匹配的库搜索单元,如果找不到,才会去其它链接库搜索单元;在使用-library指定了某些链接库的情况下,DC首先会在这些链接库中与输入端口的操作条件(operating conditions)匹配的库搜索单元,如果找不到,才会去这些链接库中的其他链接库搜索单元。
-library选项显示地声明了要在哪些链接库中搜索单元,这对于多链接个库中出现多个同名单元的情况有用(尽管这不常见)。
下面的命令指定使用了typical库中的CLKINVX1单元。
set_driving_cell -lib_cell CLKINVX1 -library typical [get_port d]指定上升沿、下降沿
-rise选项用于指定驱动单元使用于端口的上升沿、-fall选项用于指定驱动单元使用于端口的下降沿(注意:不管是什么驱动单元,驱动单元的时序弧都是正单调性)。如果这两个选项都没有指定,延迟同时作用于时钟的上升沿和下降沿(相当于它们同时指定)。
下面的命令将输入端口上升沿的驱动单元改为CLKINVX2,下降沿的驱动单元依旧是CLKINVX2,如图8所示。
set_driving_cell -rise -lib_cell CLKINVX2 -library typical [get_port d]
图8 端口驱动单元报告
指定最大、最小条件
-max选项用于指定延迟值作用于最大条件(建立时间分析),-max选项用于指定延迟值作用于最小条件(保持时间分析)。如果这两个选项都没有指定,延迟同时作用于最大条件和最小条件(相当于它们同时指定)。通常情况下,我们会使用-min选项指定驱动能力最强的单元(最快),使用-min选项指定驱动能力最弱的单元(最慢)。
下面的命令使用-min选项指定驱动能力强的CLKINVX2驱动输入端口d,使用-max选项指定驱动能力强的CLKINVX1驱动输入端口d,如图9所示。
set_driving_cell -min -lib_cell CLKINVX2 [get_port d]
set_driving_cell -max -lib_cell CLKINVX1 [get_port d]
图9 端口驱动单元报告
指定输出引脚
-pin选项用于指定驱动单元的输出引脚,这对于拥有多个输出引脚的单元很有用,如果使用多个输出引脚的单元而不指定-pin选项,则DC会使用搜索到的第一个输出引脚。
比如对于一个触发器单元DFFRX1,其拥有两个输出引脚,分别为Q及QN,下面的命令指定以DFFRX1的输出引脚Q驱动输入端口d,如图10所示。
set_driving_cell -lib_cell DFFRX1 -pin QN [get_port d]
图10 端口驱动单元报告
指定输入引脚
-from_pin选项用于指定驱动单元的输入引脚,这对拥有多个输入引脚的单元很有用,如果使用多个输出引脚的单元而不指定-from_pin选项,则DC会使用搜索到的第一个输入引脚(前提输入输出引脚间有时序弧)。
比如对于一个单元CMPR42X1,它拥有五个输入端口、三个输出端口,如图11所示。

图11 CMPR42X1单元框图
下面的命令指定以CMPR42X1的输入端口A,输出端口S作为输入端口d的驱动源,如图12所示。
set_driving_cell -lib_cell CMPR42X1 -from_pin A -pin S [get_port d]
图12 端口驱动单元报告
指定禁止放缩
-dont_scale选项用于指定,驱动单元的转换时间和延迟不会因为操作环境而被放缩(scale)。放缩指的是当工作环境与特征化条件不同时,转换时间和延迟的计算在最后会被乘以一个因子,如图5、图6、图7中所示的那样。
使用下面的命令指定上的输入端口d的驱动单元为CLKINVX1并禁止放缩。
set_driving_cell -lib_cell CLKINVX1 -dont_scale [get_port d]指定设计规则不转移
现在我们终于开始解决一开始使用命令时的警告问题了,即
Warning: Design rule attributes from the driving cell will be set on the port. (UID-401)这是因为默认情况下,驱动单元的设计规则会被复制到输入端口,例如max_fanout、 max_capacitance、max_transition、min_fanout、min_capacitance、min_transition这些属性。而-no_design_rule选项用于禁止这些行为。
使用下面的命令指定上的输入端口d的驱动单元为CLKINVX1并保证设计规则不转移,此时命令执行后不会出现警告。
set_driving_cell -lib_cell CLKINVX1 -no_design_rule [get_port d]删除驱动单元
-none选项用于删除之前指定的驱动单元相关信息,但是这个选项已经过时,尽管它目前仍然起作用,建议使用remove_driving_cell命令替代。
下面的命令删除了输入端口d上的驱动单元。
set_driving_cell -none [get_port d]指定上升、下降转换时间
-input_transition_rise和-input_transition_fall选项用于指定驱动单元输入端上升、下降沿的转换时间,默认情况下,使用输入转换时间0计算输出转换时间和延迟,如图6、图7所示的那样。
下面的命令指定了驱动单元CLKINVX1的输入上升、下降沿转换时间分别为0.5、0.4。
set_driving_cell -lib_cell CLKINVX1 -input_transition_rise 0.5 -input_transition_fall 0.4 [get_port d]
下面使用report_delay_calculation -from [get_port d] -to [get_port d]命令报告端口的延迟计算情况,如图13所示。
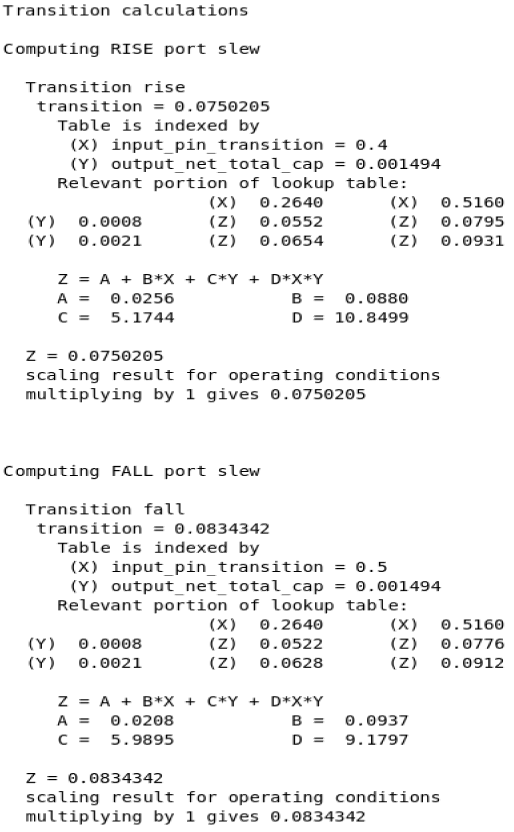
图13 端口转换时间计算情况
可以看到对于输入单元下降沿转换时间的计算,使用了指定的输入端上升沿转换时间;对于输入单元上升沿转换时间的计算,使用了指定的输入端下降沿转换时间。也就是说,这里的计算考虑了时序弧的单调性。
指定驱动能力因子
-multiply_by选项用于指定一个驱动能力因子,用于模拟驱动减弱或驱动增强,会影响驱动单元延迟和转换时间的计算。
下面的命令指定了驱动单元CLKINVX1的驱动能力因子为0.5,这代表着最终的计算结果会乘以0.5,如图14、图15所示。
set_driving_cell -lib_cell CLKINVX1 -multiply_by 0.5 [get_port d]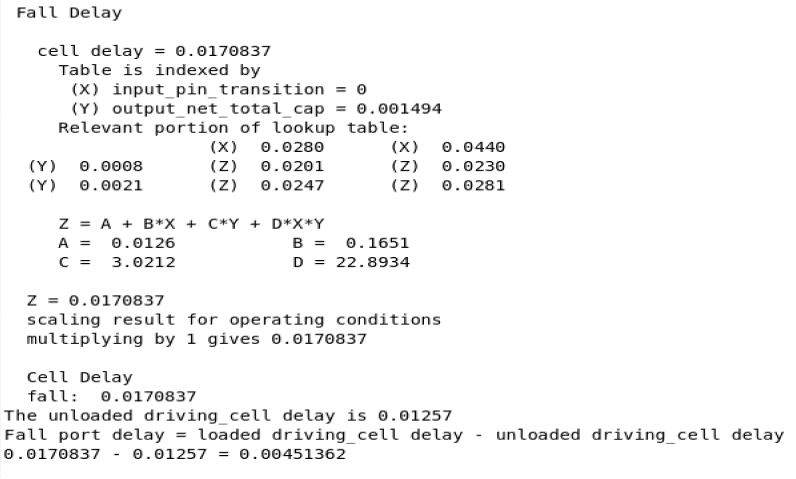
图14 端口延迟计算情况
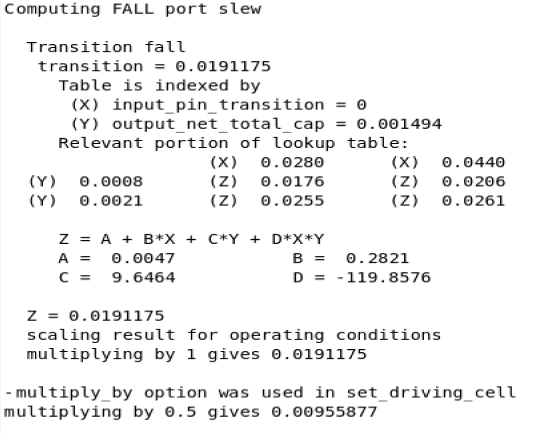
图15 端口转换时间计算情况
在使用这个选项是会出现如下警告,代表着这个选项已经过时,即将删除。
Warning: Starting from 2019.03 release, the 'set_driving_cell' command will no longer support the '-multiply_by' option (OBS-002)![Unicode转换 [ASIS 2019]Unicorn shop1](https://img-blog.csdnimg.cn/direct/680cd82a7d1e459db8d6d97b93339d24.png)



![给定长度为n(n<=20)的数组a,-20<=ai<=20, 每次操作选择i,j,使a[i] += a[j], 在31次操作内使a不递减,输出每次操作的i,j](https://img-blog.csdnimg.cn/direct/b7958c1f23bb46e79983ccc4e11940f6.png)