本次开源计划主要针对大学生无人机相关竞赛的视觉算法开发。
开源代码仓库链接:https://github.com/zzhmx/Using-color-gamut-limitations-such-as-HSV-and-RGB-for-object-detection.git
主要使用传统算法,如果想要使用进阶版机器学习算法,请移步到我的另一系列博客:
yolov5-tracking-xxxsort yolov5融合六种跟踪算法(二)–目标识别
yolov5-tracking-xxxsort yolov5融合六种跟踪算法(三)–目标跟踪
实现方法
传统算法做目标检测有一个很常用的方法是使用颜色识别,可以称为色块检测,具体流程分为三步:
1.提取包含目标的视频帧,读取目标的HSV或者RGB等其他色域其中一种或多种的三个通道范围。这里相当于获取无人机需要识别的目标的粗略色域范围。–readhsv.py
运行程序默认调用摄像头,按下空格键可截取一张图像作为实验图像。使用鼠标在截取的图像中的目标区域画框即可在程序输出区返回目标HSV三个通道分别的范围是多少。
2.在第一步返回的通道范围基础上将滑块分别拖动到对应值,然后通过可视化交互界面调整各个通道值,使得只有目标剩余在可视化界面,记录微调后三个通道的范围。–Fine_tuning_range.py
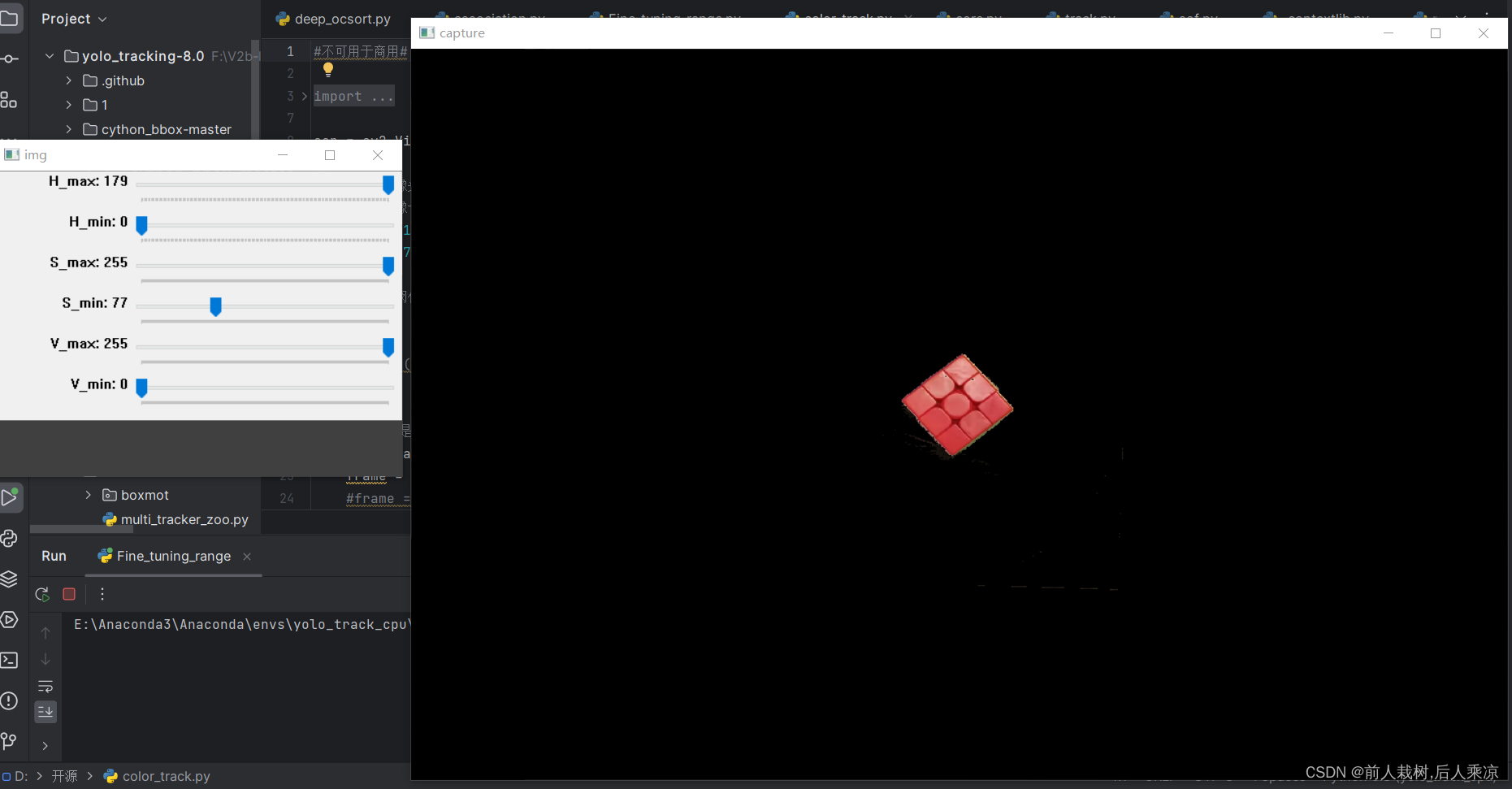
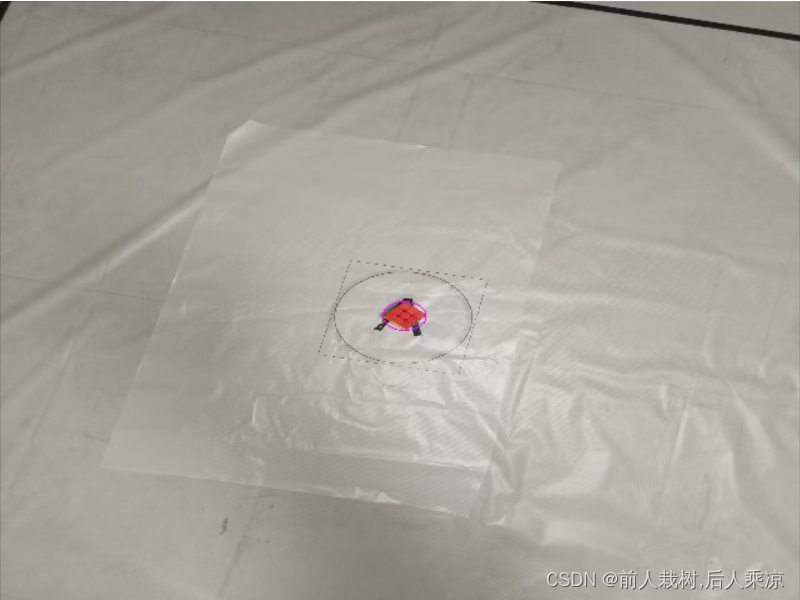
3.使用微调后的最优范围作为先验条件以对视频流做检测
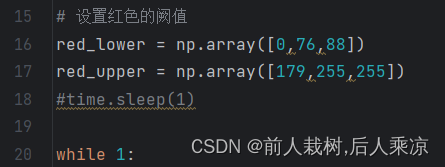
在color_track.py的16、17行更改为你的值,就可以实现对你需要检测目标的识别,并返回目标的位置。无人机可以根据该位置信息做降落、抓取、投放等一系列动作。





![xff注入 [CISCN2019 华东南赛区]Web111](https://img-blog.csdnimg.cn/direct/e9c14f1e4cf1451482822a9936fda0e4.png)