1、内容简介
略
53-可以交流、咨询、答疑
2、内容说明
略
摘 要
19世纪90年代,美国西屋电气公司研制出了世界上第一台交流同步电机。随着科学技术的迅猛发展和生产工艺的持续进步,在20世纪50年代出现了永磁同步电机。它以永磁体代替电励磁绕组,使电机结构变得简单,同时还省去了容易出问题的集电环和电刷。80年代稀土永磁材料研究取得突破性进展。尤其是第三代永磁材料钕铁硼(NdFeB)的出现,极大地促进了永磁同步电机在电气传动领域的广泛应用。相比普通电机,永磁同步电机的功率因数更高,能量密度更大,体积重量更小且更加节能环保。随着工业自动化的深入发展,永磁同步电机必将取代普通电机,成为当今世界的主流电机。
在人们的日常生活和工农业生产中,实现电磁能与机械能之间转换的电机随处可见,并有着举足轻重的地位。电气传动通过控制各种伺服电机的电压,电流等物理量,来控制执行机构的速度,位移,加速度等,让执行机构能按照人们的期望进行动作,以满足生产加工等需求。大到航空母舰、航天飞船、磁悬浮列车等小到电动汽车,洗衣机,电风扇等,以电机为控制对象的电气传动可谓无处不在。这其中很多都有调速方面的要求,比如车辆,船舶,机床,电梯等。随着科技的全面深入发展和生产工艺的不断进步,人们对电气传动控制系统提出了更为苛刻的新需求,在交流调速领域,以矢量控制和直接转矩控制为代表的变频调速技术,成为了先进传动控制的主流技术,在高性能调速领域都得到大量应用。总体而言,交流电机是一个非线性、强耦合的复杂高阶系统,运用矢量控制原理可以简化电机模型,将其等效为直流电机,实现解耦控制,并保证其有较快的响应速度。高性能的控制系统除了要求快速和精确,同进也对高性能的执行机构一一电机提出了更加严格的要求。19世纪初叶,世界上第一台永磁体励磁电机研制成功,由于它采用的材料是铁矿石,磁能密度很低,所以制成的电机非常庞大,马上就被电励磁电机所淘汰。而随着永磁材料铝镍钻和铁氧体的出现,让永磁体的磁性能有了质的飞跃,永磁电机开始如雨后春笋般迅猛发展。同时半导体技术也取得了新的突破,尤其是高性能的功率半导体IGBT和智能半导体IPM的研制成功,极大的促进了交流传动系统的发展。 1983年,日本成功研制出的稀土永磁体钕铁硼具有非常优异的磁特性、材料来源十分广泛、成本价格相对低廉等优势,吸引了工业发达国家的目光,各国都投入了大量人力对其进行开发和应用。而今,以钕铁硼为永磁体材料的永磁电机已大量应用于交通运输、冶金轧钢、家用电器等行业中。作为高性能永磁材料发展的新成果一一钕铁硼,因其有着非常好的磁能积和矫顽力,被广泛应用于现代工业传动技术中,显著的改变了永磁同步电机的结构和调速性能,与交流异步电机相比,其主要优点有:
- 功率因数高,效率高。与交流异步电机相比,由于永磁同步电机没有产生无功功率的励磁电流,因此具有更高的功率因数、相对更小的定子铜耗。当系统处于稳态运行时,因为没有转子铜耗,所以电机的总损耗相对更低,甚至在多数情况下转子损耗可以忽略不计。在效率上,功率相同的两种电机,交流异步电机的效率要比永磁同步电机低5%左右。而且,在额定负载的25%-150%范围内,永磁同步电机完全可以运行在较为理想的状态,过载能力更强。
- 空间体积小且重量轻,性能可靠,易于工程实际应用。随着新的永磁材料的不断发展与完善,永磁同步电机的功率密度进一步提高了,相对于同容量的异步电机来讲,永磁同步电机的体积能减少15%-35%。精简的自身结构让其能应用于更多的复杂场合。
- 永磁同步电机转矩脉动小,运行相对稳定,具有良好的动态性能和稳定性。相对于异步电机,永磁同步电机的抗扰能力更强。当负载转矩突变时,永磁同步电机只要适当调节电机功角,即可马上使转速保持不变,响应速度很快。并且,在短时间内永磁同步电机输出的最大转矩可以达到其额定值的两倍多,非常适合在转矩波动大的环境下使用。
- 交流调速技术的发展概况
一直以来,交流电机因其复杂的数学模型和自身结构,转矩性能控制得都不够理想,应用受到很大的限制,由于其在工业自动化生产中的地位日益提高,一大批的专家学者潜心于交流调速系统的研究和应用中,产生了很多先进的交流调速控制技术,实现交流电机的调速性能质的飞跃。目前应用较广泛的主要有下面3种调速控制策略:
- 标量控制技术
通常标量控制可以分为两类,一类是恒V/F控制,另一类是转差频率控制。恒V/F控制也可以称作VVVF控制。它是一种标量控制,以系统的稳态数学模型为基础,控制输入电机的电压与频率之比为定值来保证磁通恒定,实现对转速和转矩的精准控制。由于它的稳态性能较好而动态性能不理想,为了提高转速调节的动态性能和稳态精度,可以采用基于转差频率控制的转速闭环系统,即转差频率控制。当电机工作在稳定状态时,在很小的转差频率变化范围内,如果维持磁链不变,那么此时电机转矩就与转差角频率成线性关系,因此控制转差角频率就可以控制转矩。但是它依据的依然是电机稳态模型,得不到很好的动态性能。
- 矢量控制技术
1971年,德国专家F.Blaschke以电机磁场理论为基础提出了矢量控制(VC)技术,它采用统一电机原则,以产生等效的旋转磁场磁链为准则,运用两次坐标变换,把电机三相绕组的交流电流矢量变换成在旋转坐标系下的两相正交绕组直流电流矢量,从而实现将三相交流电机等效为直流电机进行调速的目的。并实现了电机的解耦控制。总的来说,运用矢量控制技术分为三步,首先运用Clark和Park变换将三相静止坐标系中耦合的电机参数变量变换成两相旋转坐标系中的静止物理量,其次根据旋转坐标系下的数学模型找出各变量与转矩的对应关系,最后依据对应关系对电流进行正交分解,独立控制,实现与直流电机媲美的理想调速性能。矢量控制简单高效,可靠性高,易于实现,被大量运用于各种电机的调速系统中。但是对于它的改善和研究却从未停止过。
- 直接转矩控制技术
在矢量控制技术出现的十多年后,德国的M.Depenbrock教授提出了直接转矩控制(DTC)技术。从本质上来说,两种控制方法是异曲同工的。而直接转矩控制技术一般将电机和负载作为一个统一的整体,不需要复杂的坐标变换,直接就可以在定子坐标系下进行计算和在线控制电机转矩,它同时采用空间矢量调制,经过施密特触发器产生PWM信号,对逆变器进行最优开关状态选择,并采用Bang-bang控制实时控制定子磁链和转矩,省去了复杂的PWM计算,加快了系统动态响应速度。总之,在定子坐标系下,直接转矩控制就能完成所有运算,不需要繁杂的坐标变换,其结构简单、鲁棒性好和动态响应快。但它最大的缺点在于,它仍是由单个矢量和单一转矩为基础建立起来的控制方法,所以电机不可避免地会出现低速区转矩脉动大、开关频率低,系统不可靠等缺点,一定程度上限制了它的应用。
1.3.无速度传感器技术的研究概况
上世纪70年代,国外的专家就已经开始进行了无速度传感器控制技术的研究。Abbondan.Tia等人提出了一种基于电机静态数学模型的估算方法,但采用此方法容易导致电机动态性能下降,所以很难在工程上实际应用,同时由于当时控制芯片功能简单,只有等到电机到了高速区才能收到较理想的效果。随着DSP技术的快速发展,基于永磁同步电机的无速度传感器技术才在应用中取得了重大突破。1983年,R.Joetten等人在电机交流调速控制系统中首次将无速度传感器技术与矢量控制结合起来。近年来,世界各国学者针对无速度传感器技术开展了大量的研究工作,提出了许多种转速估算方案,总的来说可以分成两种:一种是基于理想电机模型的方法,另一种是基于非理想电机模型的方法。
1.3.1 基于理想电机模型的方法
理想的电机模型有以下假设:电机三相绕组呈对称分布;由三相绕组形成的磁动势在电机气隙呈正弦分布;只考虑基波磁场的作用;忽略磁滞和涡流,忽略磁路饱和;忽略集肤效应。
- 直接计算法
永磁同步电机正常运行时,永磁体磁场会在定子绕组而产生感应电势,通过对感应电势的分析判断可以实现对转子位置估算。简单直接,响应速度快,便于实现是此方法的最大优点。但由于它是建立在开环模型下的位置辨识方法,没有相应的反馈校正环节,动态性能差,严重依赖于精确的电机参数。
- 观测器模型算法
随着新技术的发展和研究的进一步深入,各国学者提出了很多基于观测器模型的无速度控制策略,其中应用性较强的主要有:全阶自适应状态观测器; 扩展卡尔曼滤波器法; 模型参考自适应法;滑膜观测器法。
全阶自适应状态观测器也可称为Luenberger观测器,它能实现对定子电流和转子磁链的在线观测,并根据两者的估算误差辨识出定子电阻和转子转速,将电机转速与负载转矩看作状态变量来实现转子磁链观测的方法称为扩展Luenberger观测器法,它巧妙地回避了求解非线性时变方程。
扩展卡尔曼滤波法(EKF)提出一种基于迭代形式的递推方法,通过实时观测到的数据对系统状态进行无偏和最小误差方差的最优估计。将电机的数学模型看作非线性状态方程,对系统进行线性化变换,把速度估算出来。它的优点是抗噪声能力强,但是EKF算法涉及矩阵运算,计算复杂,在实际工程中难以实现。
模型参考自适应(Model reference adaptive system,MRAS)方法的基本思路是采用两个并行的模型同时工作,其中一个作为参考模型,另一个作为可调模型,参考模型中不含转速估算参数,而可调模型中却包含需要进行辨识的参数。两个模型同时运行,输出两个具有相同含义的物理量。选取这两个物理量的差值信号,送入对应的自适应律来实现对转速的精确估算。可以利用电流模型、反电动势模型等来进行参考模型和可调模型的选取。根据现场的实际情况可以选择最合适的方法。比如可将全阶状态观测器与MRAS结合使用。将电机自身看作参考模型而把全阶状态观测器看作可调模型,这样就能避免纯积分问题,明显减少系统对电机参数的依赖性。因其具有这些优势,所以MARS方法是被广泛应用在速度辨识系统中。
滑膜观测器法是采用估计的电流偏差来确定滑膜面,使控制系统的状态最后稳定在滑膜超平面上。所以它利用了滑膜变结构控制的抗扰性强等优点又提高了系统的鲁棒性。它与MARS控制策略相似,但却有更好的鲁棒性能。而它的主要问题是,由于系统惯性导致的切换滞后和离散化采样而产生的抖动,尤其在低速区更为明显,工程上虽然可以采用积分补偿去抖,但引入积分的同时如何来保证它的鲁棒性和收敛速度仍然是一个值得研究的难点。
综上所述,建立在电机自身参数的基础上的基于理想电机模型的方法,依赖于准确的电机参数。尤其在低速区,它还依赖于准确的电流信号和逆变器的正确补偿。在零频处,由于电机自身无法被观测,因此基于理想电机模型的所有转速估算方法都不能用。
1.3.2基于非理想电机模型的方法
实际应用中,电机的非理想特性有:电机的磁路饱和,集肤、齿槽和转子凸极效应以及,转子偏心等等。不涉及电机的具体数学模型的基于非理想特性的转速估算方法,由
3、仿真分析
略

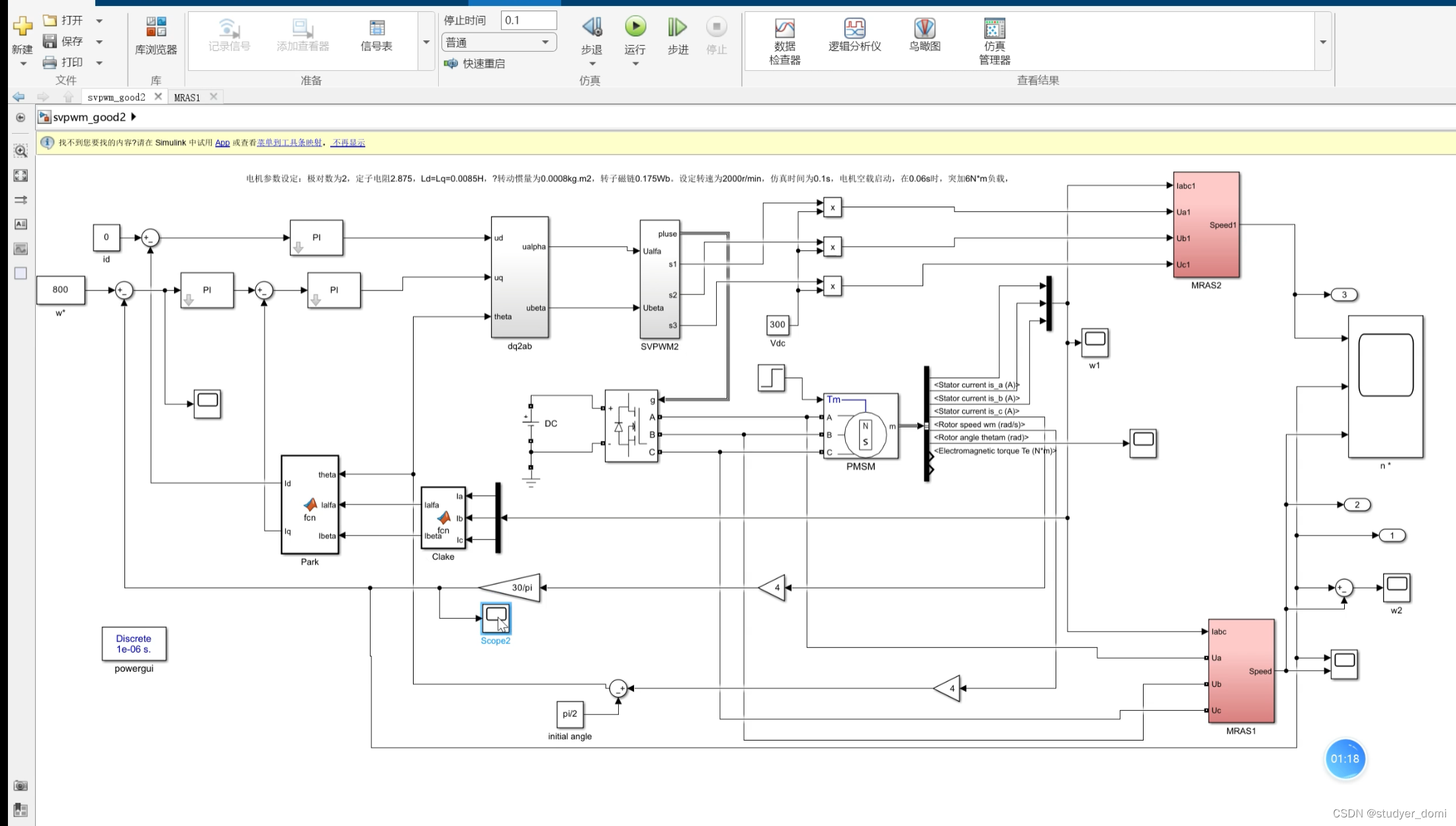
matlab simulink永磁同步电机pid控制_哔哩哔哩_bilibili
4、参考论文
略