参考教程来源

//* 实验平台:启明欣欣 STM32F407应用开发板(高配版) 参考正点原子 #include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "led.h"
#include "lcd.h"
#include "key.h"/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"/******************************************************************************************************/
/*FreeRTOS配置*//* START_TASK 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define START_TASK_PRIO 1 /* 任务优先级 */
#define START_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t StartTask_Handler; /* 任务句柄 */
void start_task(void *pvParameters); /* 任务函数 *//* TASK1 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK1_PRIO 2 /* 任务优先级 */
#define TASK1_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task1Task_Handler; /* 任务句柄 */
void task1(void *pvParameters); /* 任务函数 *//* TASK2 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK2_PRIO 3 /* 任务优先级 */
#define TASK2_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task2Task_Handler; /* 任务句柄 */
void task2(void *pvParameters); /* 任务函数 *//* TASK3 任务 配置* 包括: 任务句柄 任务优先级 堆栈大小 创建任务*/
#define TASK3_PRIO 4 /* 任务优先级 */
#define TASK3_STK_SIZE 128 /* 任务堆栈大小 */
TaskHandle_t Task3Task_Handler; /* 任务句柄 */
void task3(void *pvParameters); /* 任务函数 *//******************************************************************************************************/
QueueHandle_t key_queue; /* 小数据句柄 */
QueueHandle_t big_date_queue; /* 大数据句柄 */
char buff[100] = {"我是一个大数组,大大的数组 124214 uhsidhaksjhdklsadhsaklj"};/*** @brief FreeRTOS例程入口函数* @param 无* @retval 无*/
void freertos_demo(void)
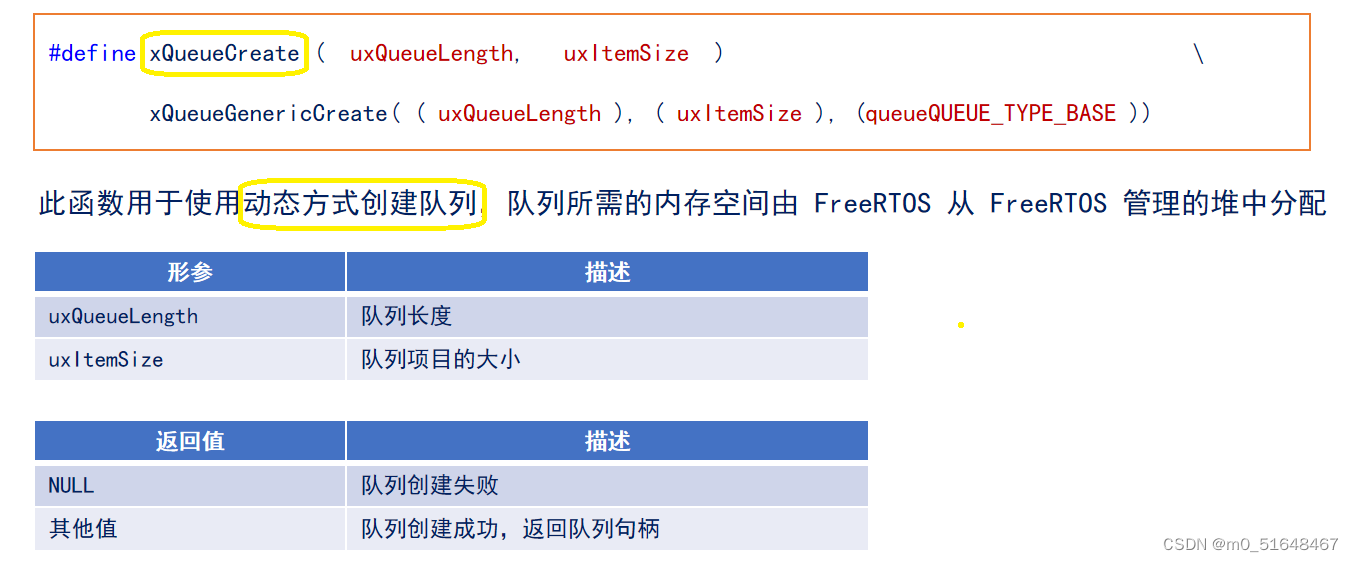
{BRUSH_COLOR=RED; //设置画笔颜色为红色LCD_DisplayString(10,10,24,"Illuminati STM32"); /* key_queue队列的动态创建 */key_queue = xQueueCreate( 2, sizeof(uint8_t) );if(key_queue != NULL){printf("key_queue队列创建成功!!\r\n");}else printf("key_queue队列创建失败!!\r\n");/* big_date_queue队列的动态创建 */big_date_queue = xQueueCreate( 1, sizeof(char *) );if(big_date_queue != NULL){printf("big_date_queue队列创建成功!!\r\n");}else printf("big_date_queue队列创建失败!!\r\n");xTaskCreate((TaskFunction_t )start_task, /* 任务函数 */(const char* )"start_task", /* 任务名称 */(uint16_t )START_STK_SIZE, /* 任务堆栈大小 */(void* )NULL, /* 传入给任务函数的参数 */(UBaseType_t )START_TASK_PRIO, /* 任务优先级 */(TaskHandle_t* )&StartTask_Handler); /* 任务句柄 */vTaskStartScheduler();
}/*** @brief start_task* @param pvParameters : 传入参数(未用到)* @retval 无*/
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); /* 进入临界区 *//* 创建任务1 */xTaskCreate((TaskFunction_t )task1,(const char* )"task1",(uint16_t )TASK1_STK_SIZE,(void* )NULL,(UBaseType_t )TASK1_PRIO,(TaskHandle_t* )&Task1Task_Handler);/* 创建任务2 */xTaskCreate((TaskFunction_t )task2,(const char* )"task2",(uint16_t )TASK2_STK_SIZE,(void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&Task2Task_Handler);/* 创建任务3 */xTaskCreate((TaskFunction_t )task3, /* 任务函数 */(const char* )"task3", /* 任务名称 */(uint16_t )TASK3_STK_SIZE, /* 任务堆栈大小 */(void* )NULL, /* 传入给任务函数的参数 */(UBaseType_t )TASK3_PRIO, /* 任务优先级 */(TaskHandle_t* )&Task3Task_Handler); /* 任务句柄 */ printf("开始任务ok\r\n");vTaskDelete(StartTask_Handler); /* 删除开始任务 */taskEXIT_CRITICAL(); /* 退出临界区 */}/* 任务一,实现入队 */
void task1(void *pvParameters)
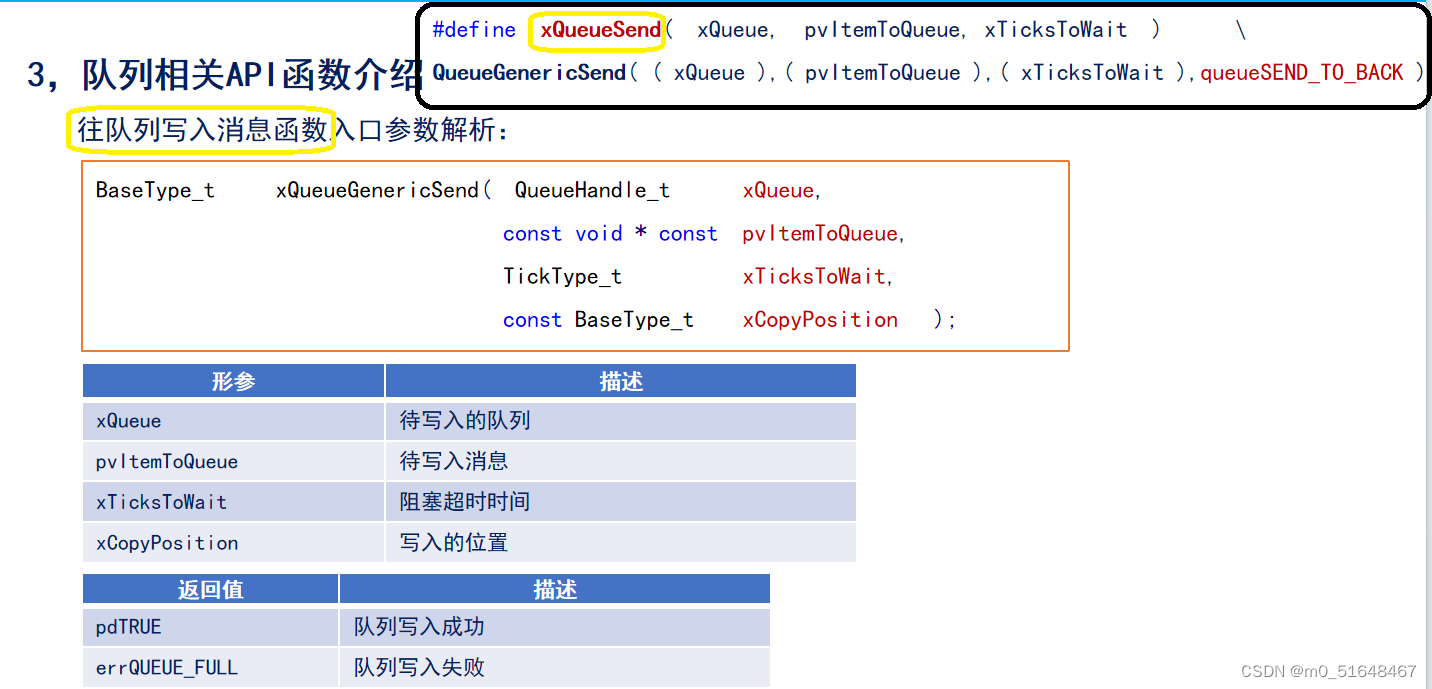
{char * buf;BaseType_t err = 0;buf = buff; /* 等同于buf = &buff[0] */while(1) {key_scan(0); if(keyup_data == KEY0_DATA || keyup_data == KEY1_DATA){err = xQueueSend( key_queue, &keyup_data, portMAX_DELAY );//参数1:创建队列返回的句柄,2:待写入的消息(这里是键值)if(err != pdTRUE) //3:阻塞超时时间(这里最大值即一直等){printf("key_queue队列发送失败\r\n");}}else if(keyup_data == KEY2_DATA) //和上面入队实际值(&keyup_data)不同,此处入队的是指针&buf(应用于大数据){err = xQueueSend( big_date_queue, &buf, portMAX_DELAY );if(err != pdTRUE){printf("key_queue队列发送失败\r\n");}}vTaskDelay(10);}
}/* 任务二,小数据出队 */
void task2(void *pvParameters)
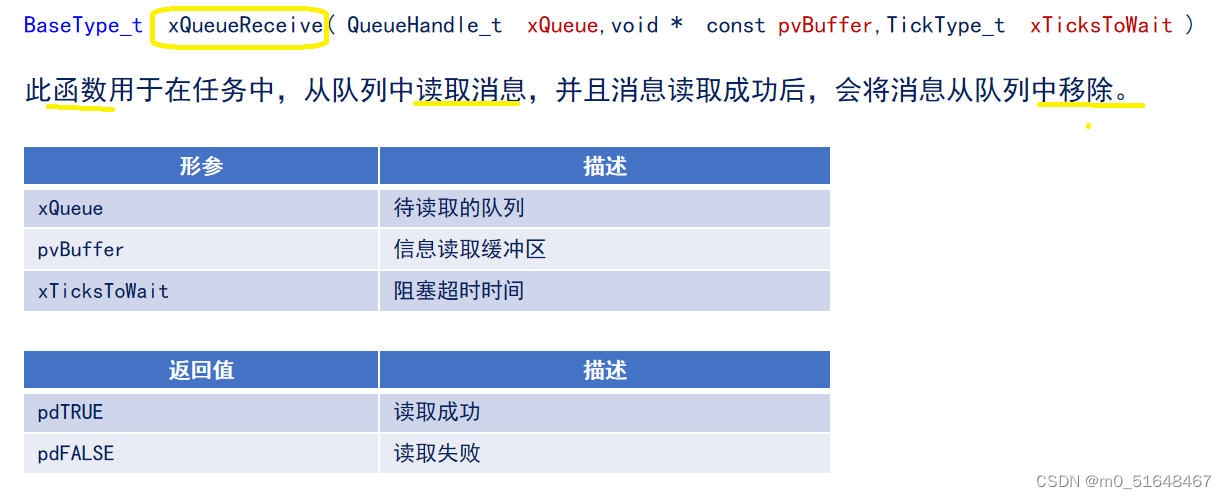
{uint8_t key = 0;BaseType_t err = 0;while(1){err = xQueueReceive( key_queue,&key,portMAX_DELAY);if(err != pdTRUE){printf("key_queue队列读取失败\r\n");}else {printf("key_queue读取队列成功,数据:%d\r\n",key);}}
}
/* 任务三,大数据出队 */
void task3(void *pvParameters)
{char * buf;BaseType_t err = 0;while(1)
{//AI:通常在使用 xQueueReceive(或类似的队列接收函数)时,您应该传递指针的地址,//以便函数能够更新该指针以指向接收到的数据。这意味着您应该传递 buf 的地址(即 &buf),而不是 buf 本身err = xQueueReceive( big_date_queue,&buf,portMAX_DELAY);//对应入队,此处出队也是指针所以是&bufif(err != pdTRUE){printf("big_date_queue队列读取失败\r\n");}else {printf("数据:%s\r\n",buf);}}
}
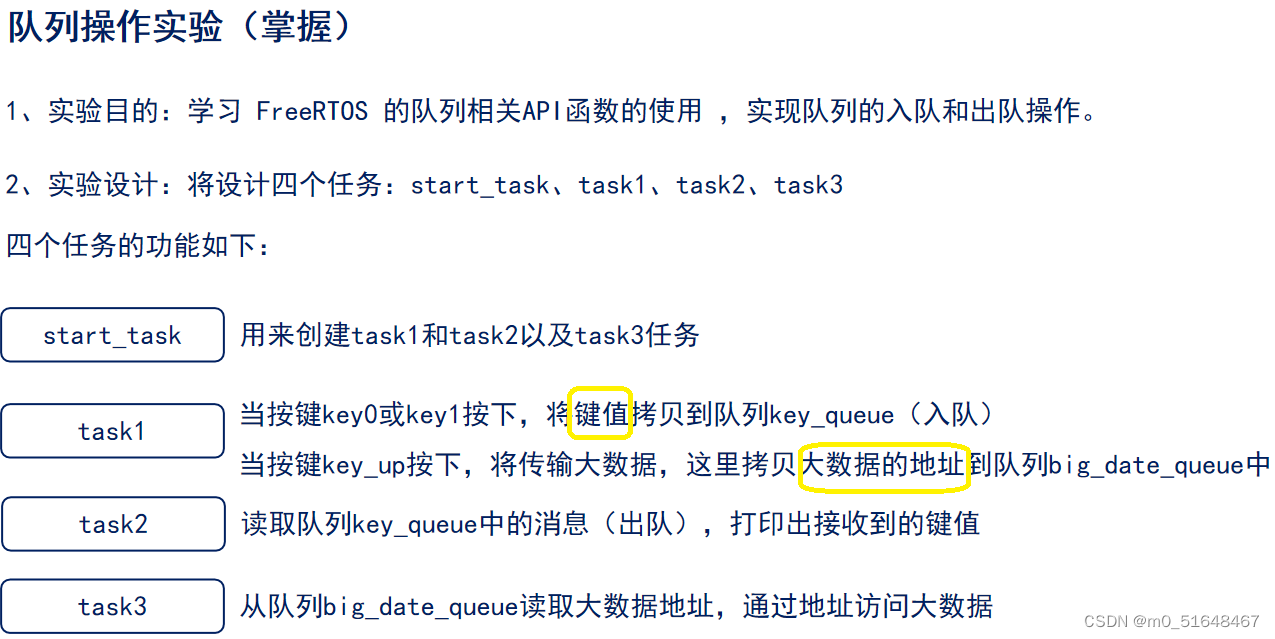
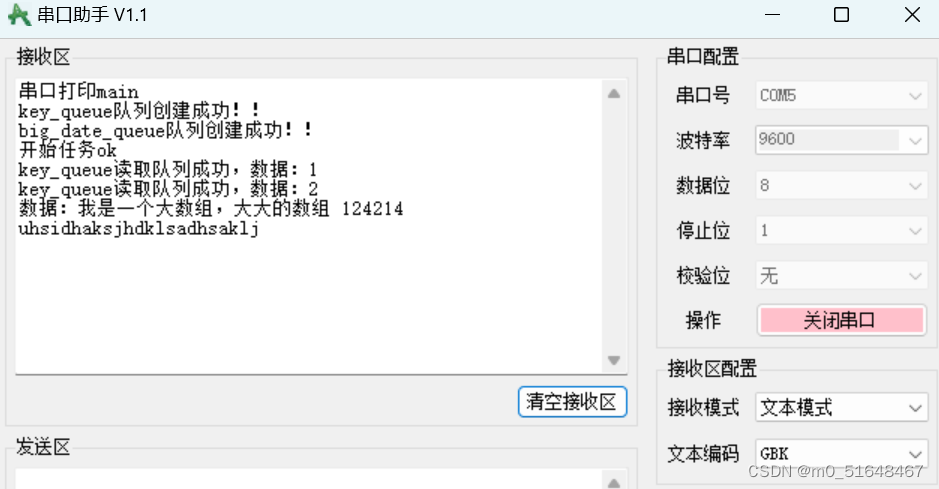
上电后,按key0----key1----key2 :
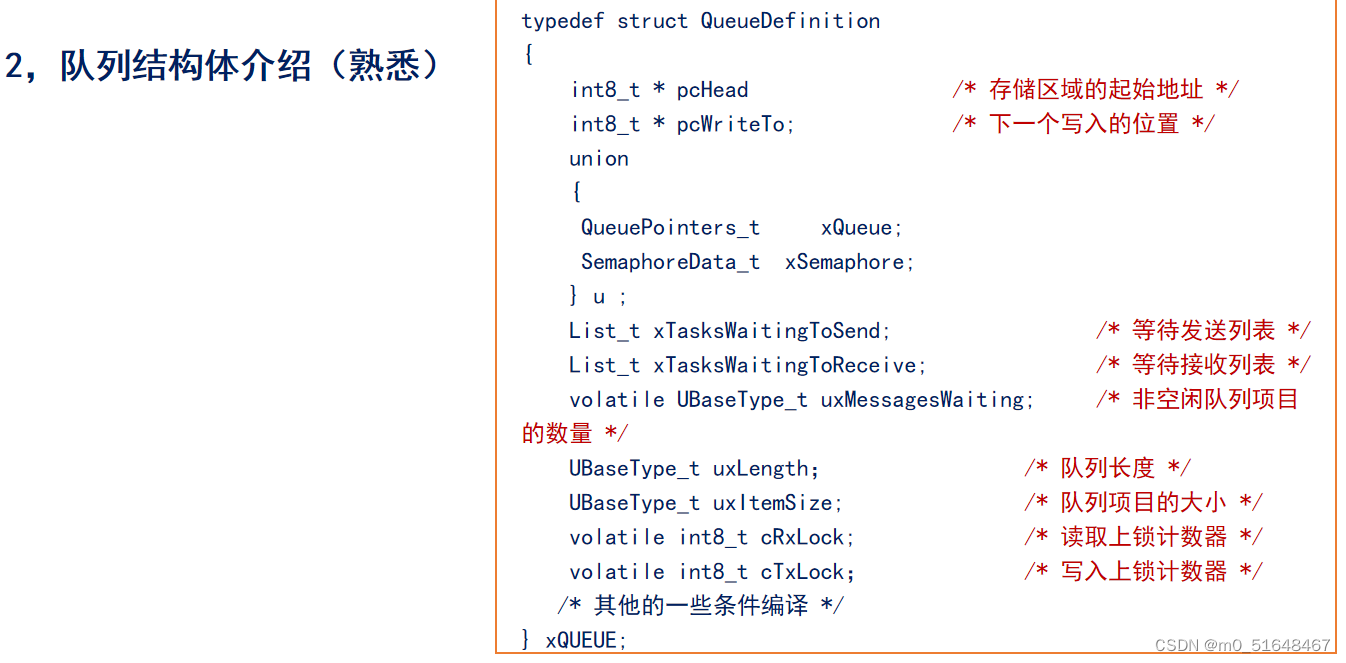
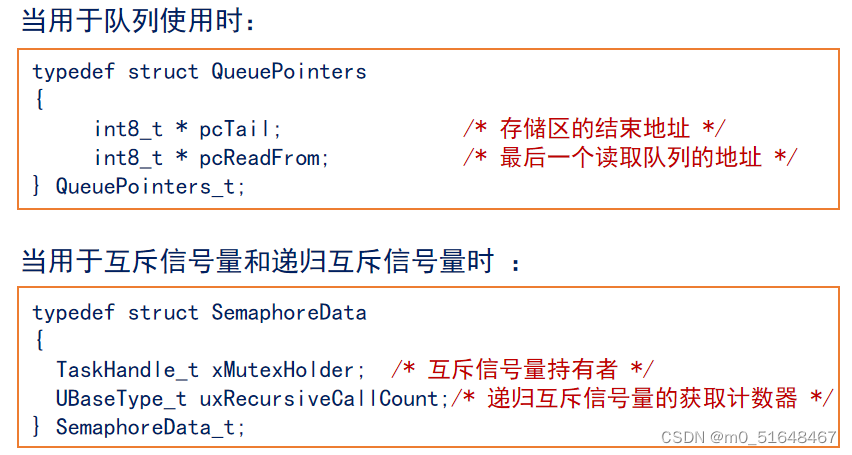
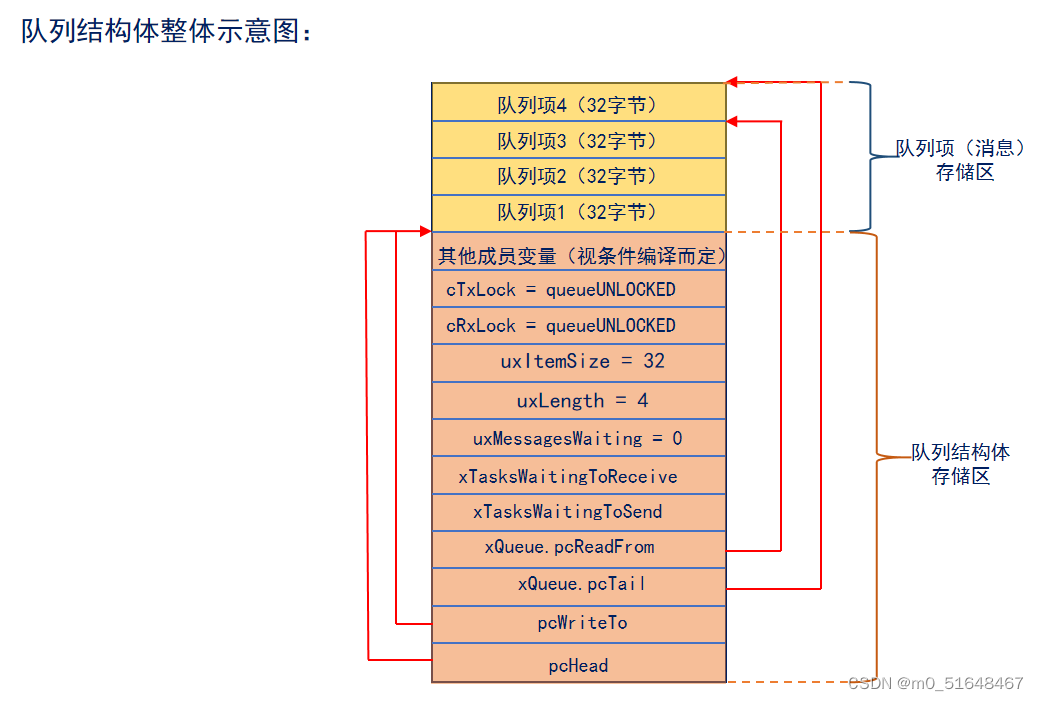
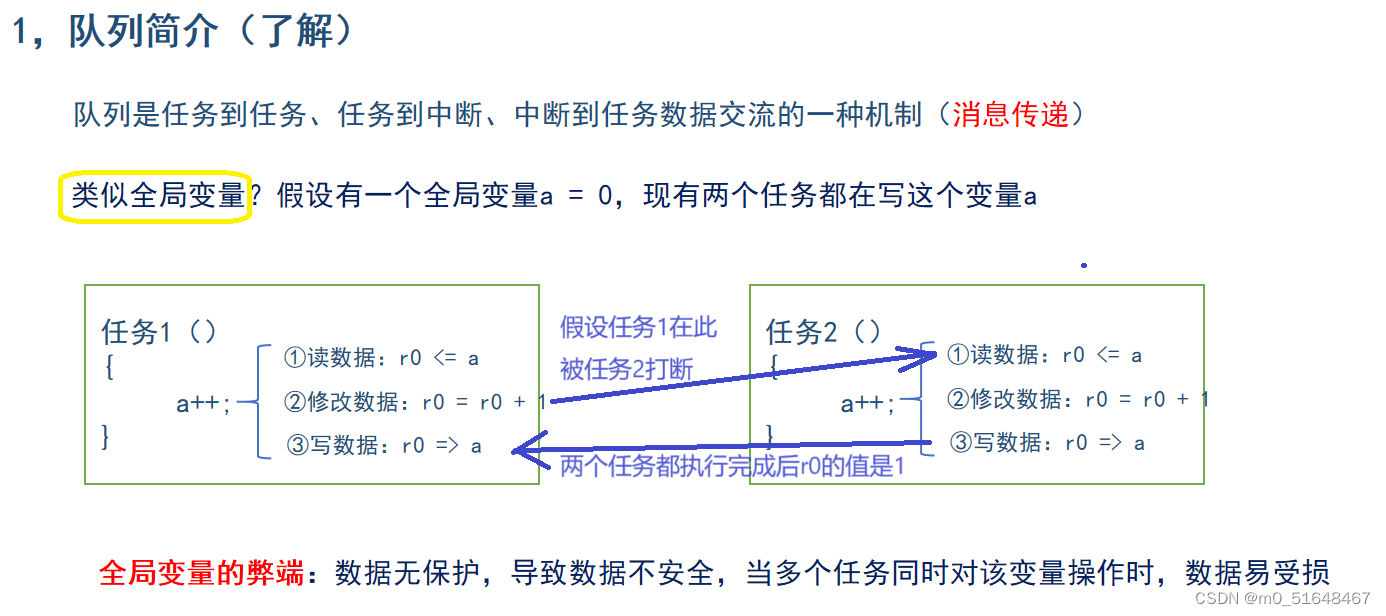
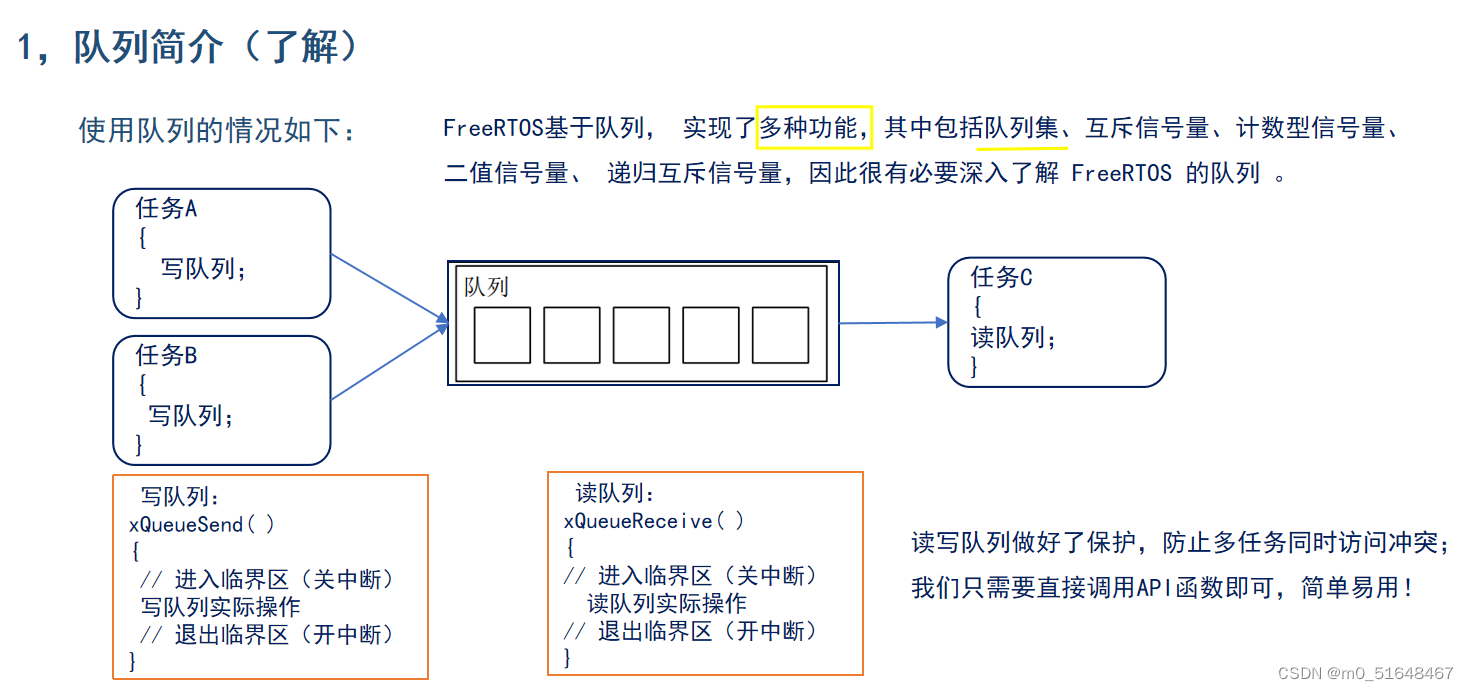
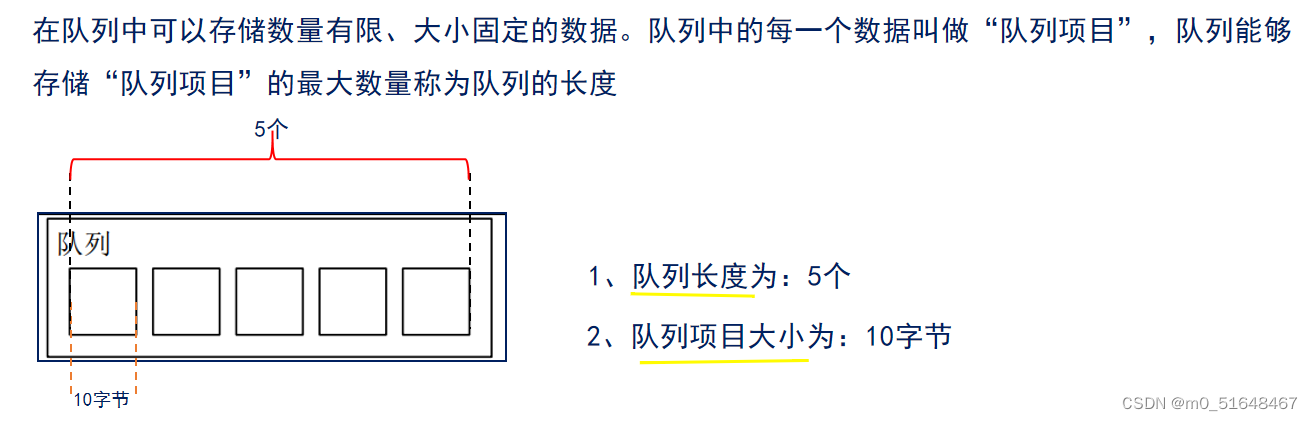
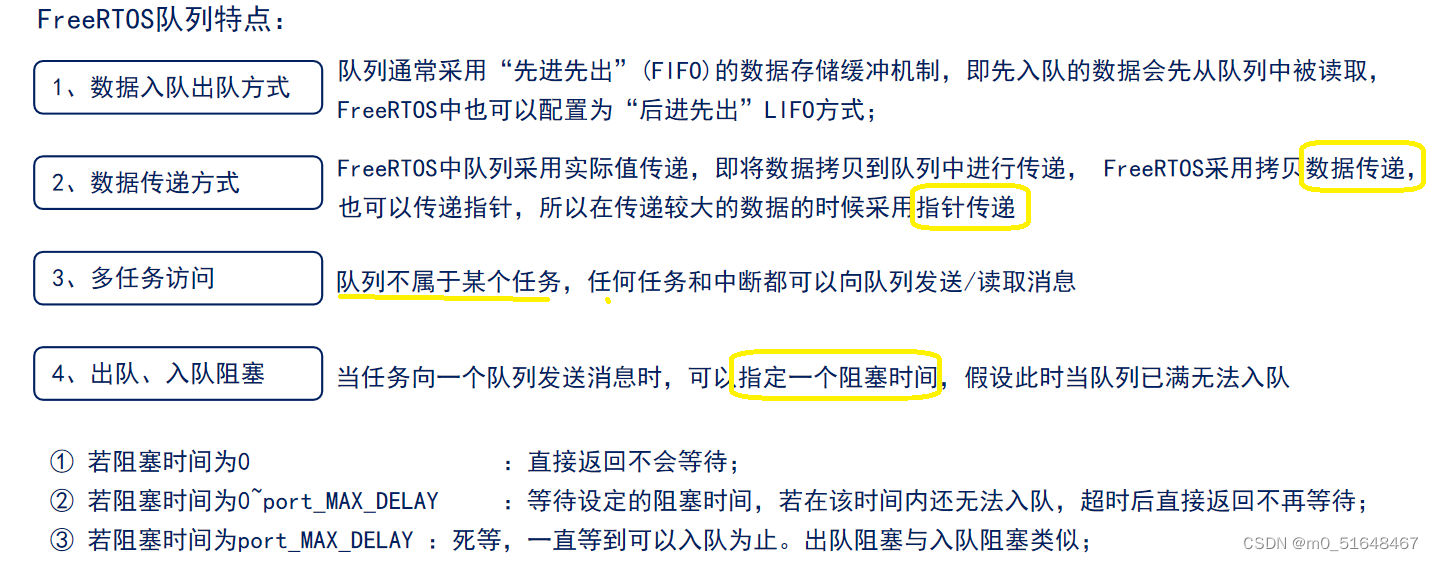
 下面是队列结构体ppt:
下面是队列结构体ppt: