之前博文测试3DGS的时候一直用服务器进行开发,没有用过笔记本,本博文记录下用笔记本ubuntu20.04配置过程~
学习笔记之——3D Gaussian Splatting源码解读_3dgs运行代码-CSDN博客文章浏览阅读3.2k次,点赞34次,收藏62次。高斯模型的初始化,初始化过程中加载或定义了各种相关的属性使用的球谐阶数、最大球谐阶数、各种张量(_xyz等)、优化器和其他参数。self.active_sh_degree = 0 #球谐阶数self.max_sh_degree = sh_degree #最大球谐阶数# 存储不同信息的张量(tensor)self._xyz = torch.empty(0) #空间位置self._scaling = torch.empty(0) #椭球的形状尺度。_3dgs运行代码https://blog.csdn.net/gwplovekimi/article/details/135500438?spm=1001.2014.3001.5501实验笔记之——基于COLMAP的Instant-NGP与3D Gaussian Splatting的对比_colmap导出相机坐标到instant-ngp-CSDN博客文章浏览阅读1.6k次,点赞25次,收藏24次。之前博客进行了COLMAP在服务器下的测试实验笔记之——Linux实现COLMAP-CSDN博客学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。_colmap导出相机坐标到instant-ngp
https://blog.csdn.net/gwplovekimi/article/details/135406537?spm=1001.2014.3001.5501实验笔记之——Gaussian Splatting_gaussian splatting viwer快捷键-CSDN博客文章浏览阅读1.6k次,点赞36次,收藏20次。之前博客对NeRF-SLAM进行了调研学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。_gaussian splatting viwer快捷键
https://blog.csdn.net/gwplovekimi/article/details/135349210?spm=1001.2014.3001.5501
目录
一、配置nvidia
关闭系统自带的nouveau
安装NVIDIA驱动
二、安装CUDA
多个cmake版本共存
测试3DGS
编译SIBR_viewers
结果可视化
参考资料
一、配置nvidia
关闭系统自带的nouveau
nouveau是Ubuntu自带的显卡驱动,要安装nvidia之前需要把它禁掉。通过下面命令来查看nouveau驱动的启用情况,如果有输出表示nouveau驱动正在工作,如果没有内容输出则表示已经禁用了nouveau。
lsmod | grep nouveau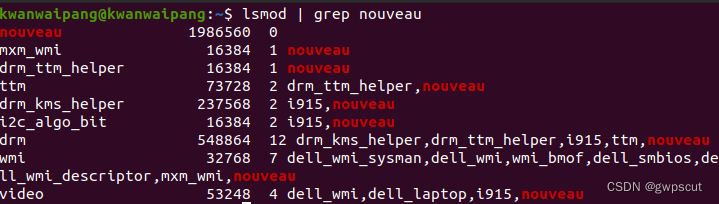
有输出,表示nouveau启动了,下面进行nouveau的禁用。在终端输入下面命令弹出blacklist.conf文件:
sudo gedit /etc/modprobe.d/blacklist.conf在blacklist.conf文件末尾加上这两行,并保存:
blacklist nouveau
options nouveau modeset=0
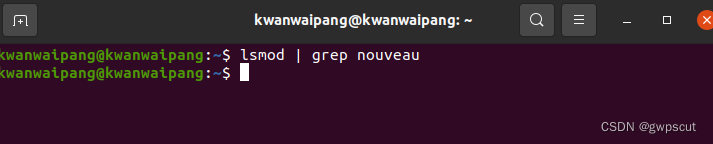
然后重启,再次查看nouveau
安装NVIDIA驱动
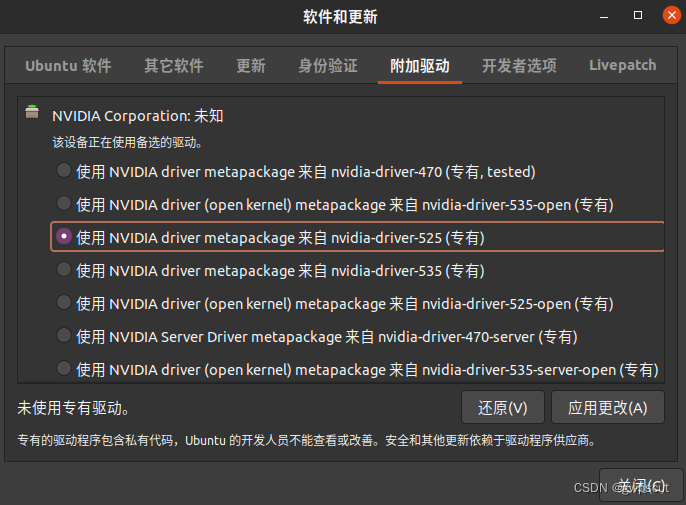
ubuntu20.04 安装NVIDIA驱动很容易,只需要打开系统设置->软件和更新->附加驱动->选择NVIDIA驱动->应用更改。该界面会自动根据电脑上的GPU显示推荐的NVIDIA显卡驱动。安装个高一点的,525吧,可以向下兼容
NVIDIA(英伟达)显卡驱动安装完成后,在终端输入nvidia-smi输出如下图所示的结果就表示安装成功了。下图中,安装的驱动支持的CUDA最高版本为12.0(注意这里需要重新启动电脑)。
然后输入nvidia-smi
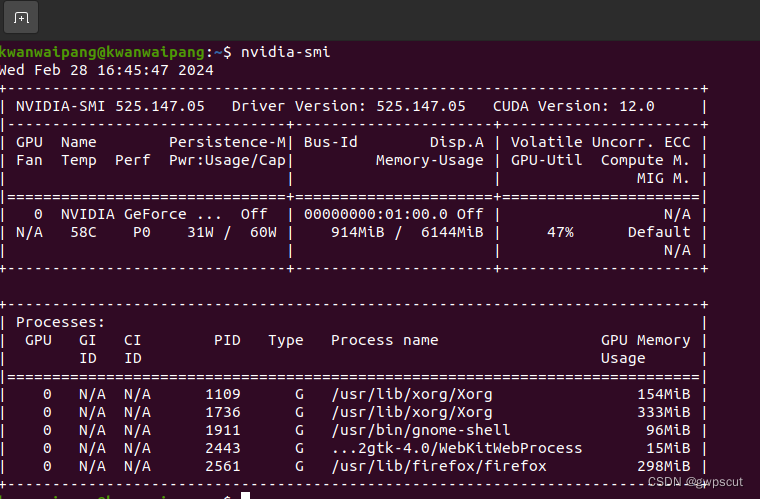
查看GPU信息

二、安装CUDA
进入cuda的网站:CUDA Toolkit Archive | NVIDIA Developer
如下图所视,采用runfile模式安装
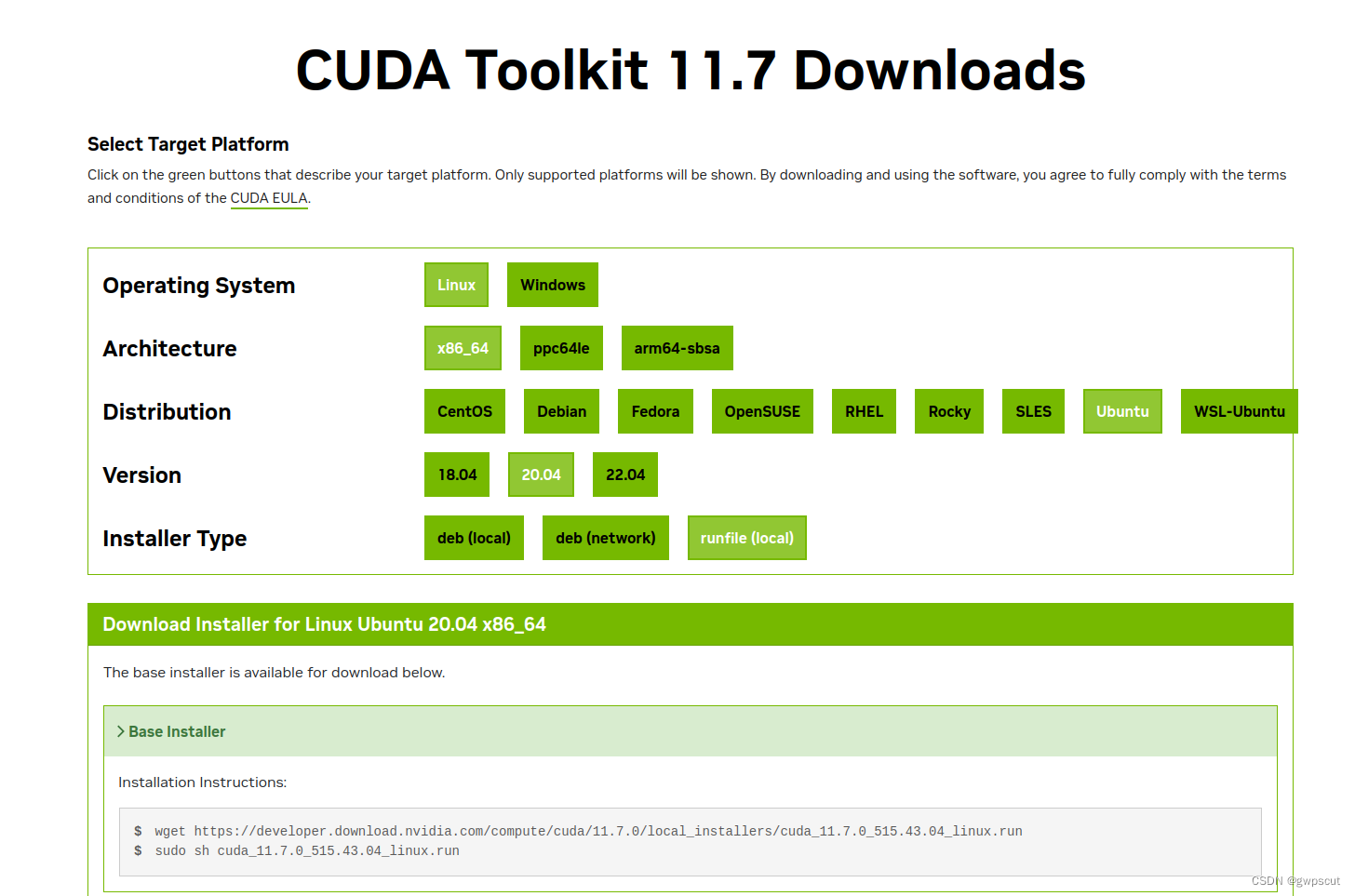
wget https://developer.download.nvidia.com/compute/cuda/11.7.0/local_installers/cuda_11.7.0_515.43.04_linux.runsudo sh cuda_11.7.0_515.43.04_linux.run!注意:需要取消驱动的选项,已经安装过了~
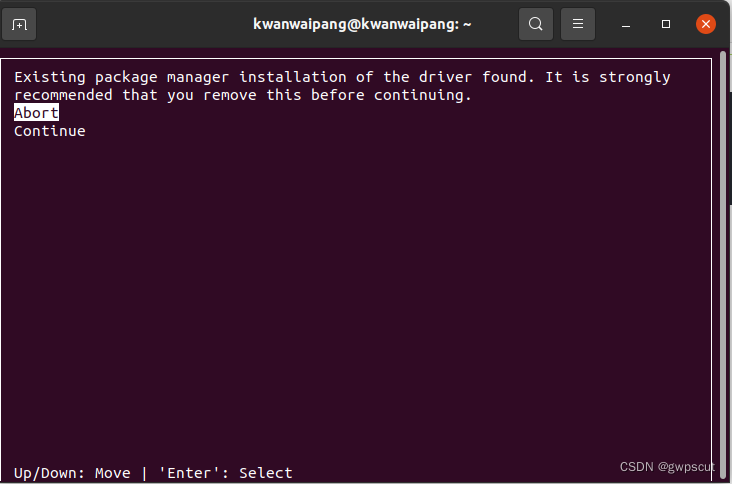


然后选择install~
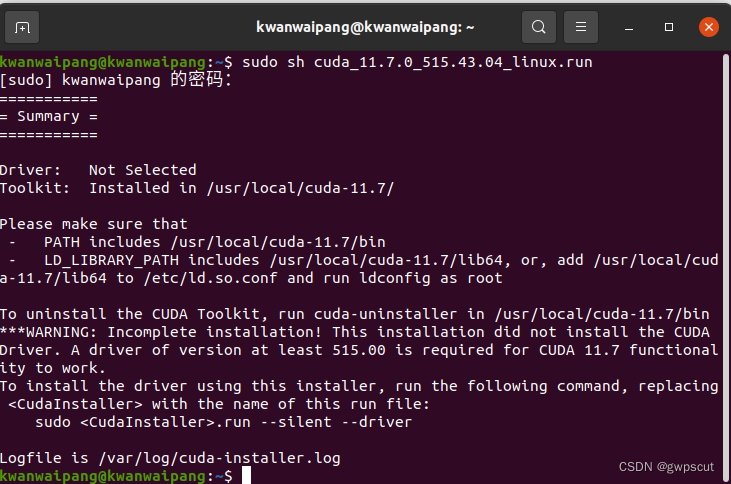
CUDA安装完成后,需要配置变量环境才能正常使用。首先在终端输入sudo gedit ~/.bashrc打开如下图所示的.bashrc文件。
然后,如下图所示在.bashrc文件的最后添加以下CUDA环境变量配置信息(我从不同的文章中看到这里添加的信息不仅相同,目前还不太清楚具体含义,所以这里仅仅罗列出它们):
export PATH=$PATH:/usr/local/cuda/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda/lib64
export LIBRARY_PATH=$LIBRARY_PATH:/usr/local/cuda/lib64
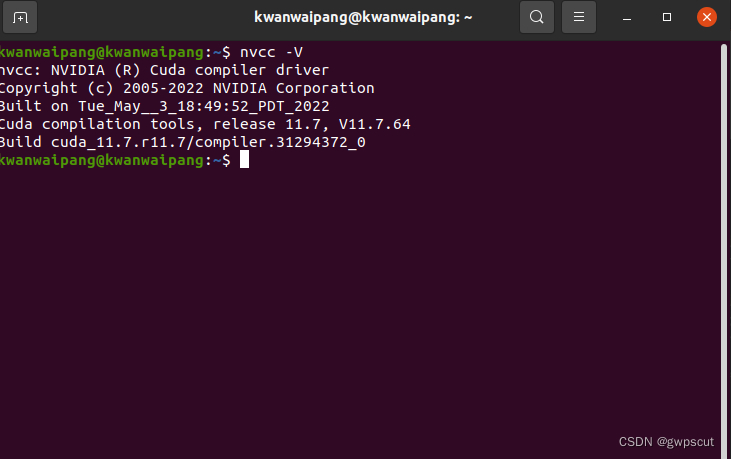
成功了!
多个cmake版本共存
当前的cmake版本如下。

升级为3.22
下载地址:Index of /files
找到对应的Linux版本,一般叫cmake-x.xx.x-linux-x86_64.tar.gz x.xx.x这个是版本。下载后之后解压,如下图
建立软连接
sudo ln -sf ~/cmake-3.22.0-Linux-x86_64/bin* /usr/bin/ 然后在/.bashrc文件中加入
export PATH=~/cmake-3.22.0-linux-x86_64/bin:$PATH再次查看cmake的版本
升级Cmake的版本可以避免编译3DGS的时候存在的各种问题,比如找不到“CUDAToolkit”等等,目前测试3.22是可以的,更低的版本(3.17及以下)都不行
测试3DGS
编译SIBR_viewers
遇到libgtk-3问题或者No package 'gtk+-3.0' found参考:(ubuntu20.04安装libgtk-3遇到的问题_libgtk-3-0:amd64-CSDN博客)
安装sudo apt install xorg-dev解决cannot find -lXxf86vm
如果出现embree相关的报错需要额外手动连接到embree3.6.1(GitHub - embree/embree at v3.6.1)
source embree-3.6.1.x86_64.linux/embree-vars.shcmake -Bbuild .
cmake --build build --target install --config RelWithDebInfo结果可视化
3DGS cpp-version GPU3060, 277.084 seconds, 6000 Iterations, 数据:train, psnr 21.30
参考资料
ubuntu 多版本cmake共存的终极方法_ubuntu多版本制作软件-CSDN博客
Ubuntu20.04下CUDA、cuDNN的详细安装与配置过程(图文)_ubuntu cudnn安装-CSDN博客




![LeetCode 刷题 [C++] 第148题.排序链表](https://img-blog.csdnimg.cn/direct/b193a3fe3fe54b78978f5cac95c351be.png)
