无人机飞行控制系统是一个能够稳定无人机飞行姿态,并控制无人机自主或半自主飞行的控制系统,也被称为无人机的“大脑”。该系统主要负责无人机的飞行姿态感知、控制和导航,是无人机实现自主飞行、稳定悬停、避障控制、导航定位等功能的核心组件。

无人机飞行控制系统主要由飞行控制器、传感器、执行机构等部分组成。其中,飞行控制器是控制系统的核心,它通过接收遥控器或自动控制系统的指令,根据传感器输入的数据,计算出无人机的姿态、位置等参数,并通过执行机构对无人机进行实时控制。传感器用于获取无人机的姿态、位置、速度等参数,包括陀螺仪、加速度计、地磁感应器等。执行机构则是根据飞行控制器的指令,通过调节无人机的舵机、电机等部件,实现对无人机姿态和位置的控制。
无人机飞控系统(Flight Control System, FCS)是涉及多学科技术融合的复杂工程,包括嵌入式系统、传感器集成、飞行力学、控制理论和算法开发等。

以下是一份简化的自研飞控步骤:
需求分析与概念设计:在无人机飞行控制系统研发的初期阶段,首要任务是对系统需求进行深入分析。明确无人机的应用场景、性能指标(如悬停精度、稳定性、续航时间、最大载重等)。选择适合的飞行平台(例如四旋翼、六旋翼或固定翼)并确定飞控系统的功能要求。
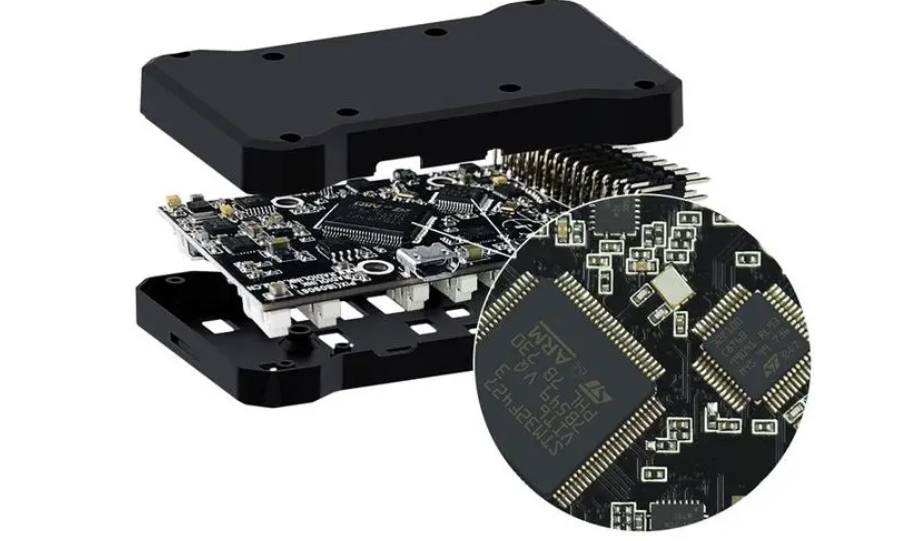
硬件选型与设计:挑选合适的微控制器(MCU)或者单片机(如STM32系列)作为主控单元,确保其计算能力足够处理复杂的控制算法。集成惯性测量单元(IMU,包含陀螺仪和加速度计),用于感知无人机的姿态角速率和加速度变化。增加磁力计以获取航向信息,GPS模块提供位置数据,气压计测量高度,以及各种必要的传感器(如超声波测距传感器、光流传感器等)。设计电机驱动电路(ESC)来控制无人机的动力输出。考虑电源管理、无线通信模块(数传电台或Wi-Fi/蓝牙模组)以及可能的故障保护机制。
软件开发:开发底层驱动程序,确保硬件资源的读取与控制。实现姿态解算算法(如互补滤波器、卡尔曼滤波器等),将传感器数据转化为无人机的姿态信息。设计并实现PID或其他高级控制器(如滑模控制、自适应控制等)以保证无人机在各种飞行状态下的稳定性和动态响应。编写导航算法(如GPS定位与自主航点跟踪、路径规划)以及避障算法(如有必要)。开发地面站软件,通过遥控器或移动设备进行参数配置、实时监控及任务调度。
系统集成与调试:将所有硬件部件组装到无人机平台上,并完成物理连接。进行初步上电测试,确认各部分工作正常,无硬件冲突或短路等问题。在安全环境下进行地面静态测试,校准传感器,并对控制参数进行初步调整。进行系留飞行测试,在空中逐步验证和优化飞行性能,调试飞控参数至理想状态。
飞行试验与验证:在符合法律法规规定的空域内进行飞行试验,评估飞控系统的实际性能表现。根据试飞结果反复迭代改进软硬件设计,直至达到预设的设计标准和性能指标。
优化改进:根据飞行测试结果,对系统进行优化改进。优化改进可能涉及硬件调整、软件升级或系统架构的变更等。通过不断的优化改进,提高无人机飞行控制系统的性能和稳定性。
安全性与可靠性设计:建立故障检测与隔离系统,当发生异常时能及时进入安全模式或降落。对电池电量、电机温度等因素进行监测,防止过热、过放电等情况导致的安全事故。
无人机飞行控制系统还需要与通信系统、导航系统等其他子系统进行协同工作。通信系统负责接收遥控器或自动控制系统的指令,并将无人机状态信息传输回地面控制站;导航系统负责提供无人机的定位、导航和授时服务,帮助无人机实现自主导航。
无人机飞控研发团队的组成:
飞控算法工程师:负责设计和优化无人机的飞行控制算法,包括姿态控制、导航控制、任务规划等。
嵌入式系统工程师:负责开发和维护无人机飞控系统的嵌入式软件,包括飞控板、传感器、执行器等。
电子工程师:负责设计和开发无人机飞控系统的电子部件,包括传感器、执行器、电源管理模块。
软件工程师:负责开发和维护无人机飞控系统的软件,包括飞行控制软件、地面站软件等。
测试工程师:负责测试和验证无人机飞控系统的性能和安全性。
可靠性工程师:负责确保无人机飞控系统的可靠性和安全性。
无人机飞行控制系统是无人机实现自主飞行、稳定悬停、避障控制、导航定位等功能的关键部分,其性能和稳定性直接影响到无人机的整体性能和安全。所以我们在选择研发团队成员的时候,必须选择有担当,有奉献精神,能评估市场需求的人员进行研发,保证飞控产品的稳定性和准时交付。
无人机飞行控制系统是一个能够稳定无人机飞行姿态,并控制无人机自主或半自主飞行的控制系统,也被称为无人机的“大脑”。该系统主要负责无人机的飞行姿态感知、控制和导航,是无人机实现自主飞行、稳定悬停、避障控制、导航定位等功能的核心组件。
无人机飞行控制系统主要由飞行控制器、传感器、执行机构等部分组成。其中,飞行控制器是控制系统的核心,它通过接收遥控器或自动控制系统的指令,根据传感器输入的数据,计算出无人机的姿态、位置等参数,并通过执行机构对无人机进行实时控制。传感器用于获取无人机的姿态、位置、速度等参数,包括陀螺仪、加速度计、地磁感应器等。执行机构则是根据飞行控制器的指令,通过调节无人机的舵机、电机等部件,实现对无人机姿态和位置的控制。
无人机飞控系统(Flight Control System, FCS)是涉及多学科技术融合的复杂工程,包括嵌入式系统、传感器集成、飞行力学、控制理论和算法开发等。
以下是一份简化的自研飞控步骤:
需求分析与概念设计:在无人机飞行控制系统研发的初期阶段,首要任务是对系统需求进行深入分析。明确无人机的应用场景、性能指标(如悬停精度、稳定性、续航时间、最大载重等)。选择适合的飞行平台(例如四旋翼、六旋翼或固定翼)并确定飞控系统的功能要求。
硬件选型与设计:挑选合适的微控制器(MCU)或者单片机(如STM32系列)作为主控单元,确保其计算能力足够处理复杂的控制算法。集成惯性测量单元(IMU,包含陀螺仪和加速度计),用于感知无人机的姿态角速率和加速度变化。增加磁力计以获取航向信息,GPS模块提供位置数据,气压计测量高度,以及各种必要的传感器(如超声波测距传感器、光流传感器等)。设计电机驱动电路(ESC)来控制无人机的动力输出。考虑电源管理、无线通信模块(数传电台或Wi-Fi/蓝牙模组)以及可能的故障保护机制。
软件开发:开发底层驱动程序,确保硬件资源的读取与控制。实现姿态解算算法(如互补滤波器、卡尔曼滤波器等),将传感器数据转化为无人机的姿态信息。设计并实现PID或其他高级控制器(如滑模控制、自适应控制等)以保证无人机在各种飞行状态下的稳定性和动态响应。编写导航算法(如GPS定位与自主航点跟踪、路径规划)以及避障算法(如有必要)。开发地面站软件,通过遥控器或移动设备进行参数配置、实时监控及任务调度。
系统集成与调试:将所有硬件部件组装到无人机平台上,并完成物理连接。进行初步上电测试,确认各部分工作正常,无硬件冲突或短路等问题。在安全环境下进行地面静态测试,校准传感器,并对控制参数进行初步调整。进行系留飞行测试,在空中逐步验证和优化飞行性能,调试飞控参数至理想状态。
飞行试验与验证:在符合法律法规规定的空域内进行飞行试验,评估飞控系统的实际性能表现。根据试飞结果反复迭代改进软硬件设计,直至达到预设的设计标准和性能指标。
优化改进:根据飞行测试结果,对系统进行优化改进。优化改进可能涉及硬件调整、软件升级或系统架构的变更等。通过不断的优化改进,提高无人机飞行控制系统的性能和稳定性。
安全性与可靠性设计:建立故障检测与隔离系统,当发生异常时能及时进入安全模式或降落。对电池电量、电机温度等因素进行监测,防止过热、过放电等情况导致的安全事故。
无人机飞行控制系统还需要与通信系统、导航系统等其他子系统进行协同工作。通信系统负责接收遥控器或自动控制系统的指令,并将无人机状态信息传输回地面控制站;导航系统负责提供无人机的定位、导航和授时服务,帮助无人机实现自主导航。
无人机飞控研发团队的组成:
飞控算法工程师:负责设计和优化无人机的飞行控制算法,包括姿态控制、导航控制、任务规划等。
嵌入式系统工程师:负责开发和维护无人机飞控系统的嵌入式软件,包括飞控板、传感器、执行器等。
电子工程师:负责设计和开发无人机飞控系统的电子部件,包括传感器、执行器、电源管理模块。
软件工程师:负责开发和维护无人机飞控系统的软件,包括飞行控制软件、地面站软件等。
测试工程师:负责测试和验证无人机飞控系统的性能和安全性。
可靠性工程师:负责确保无人机飞控系统的可靠性和安全性。
无人机飞行控制系统是无人机实现自主飞行、稳定悬停、避障控制、导航定位等功能的关键部分,其性能和稳定性直接影响到无人机的整体性能和安全。所以我们在选择研发团队成员的时候,必须选择有担当,有奉献精神,能评估市场需求的人员进行研发,保证飞控产品的稳定性和准时交付。
👇👇👇👇👇👇关注公众号“创小董”获取更多内容👇👇👇👇👇👇