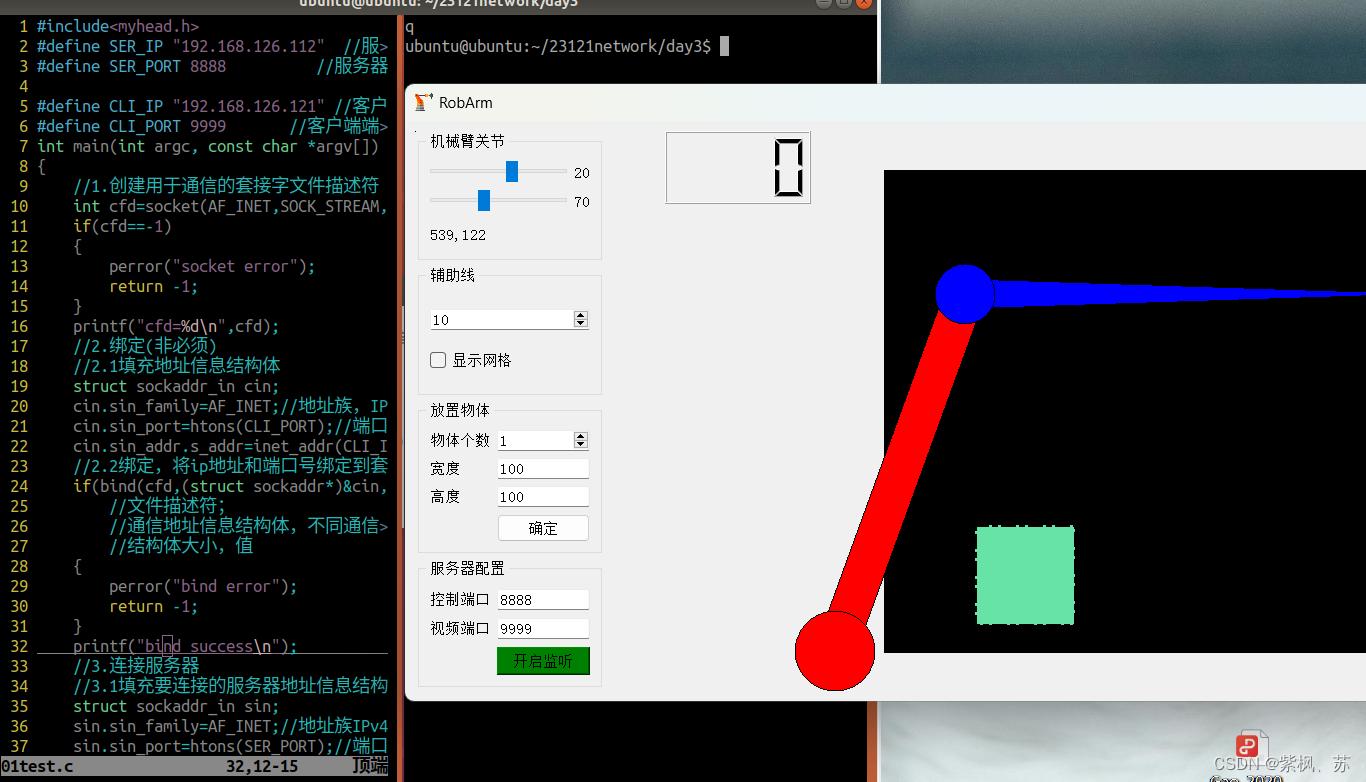
1.TCP机械臂测试
程序代码:
1 #include<myhead.h>2 #define SER_IP "192.168.126.112" //服务器IP3 #define SER_PORT 8888 //服务器端口号4 5 #define CLI_IP "192.168.126.121" //客户端IP6 #define CLI_PORT 9999 //客户端端口号7 int main(int argc, const char *argv[])8 {9 //1.创建用于通信的套接字文件描述符10 int cfd=socket(AF_INET,SOCK_STREAM,0); //通信协议族,IPv4;指定通信类型,TCP;参数2已指定通信类型11 if(cfd==-1)12 {13 perror("socket error");14 return -1;15 }16 printf("cfd=%d\n",cfd);17 //2.绑定(非必须)18 //2.1填充地址信息结构体19 struct sockaddr_in cin;20 cin.sin_family=AF_INET;//地址族,IPv421 cin.sin_port=htons(CLI_PORT);//端口号,主机号转换为网络号,2字节22 cin.sin_addr.s_addr=inet_addr(CLI_IP);//ip地址,点分十进制转为4字节无符号网络字节序23 //2.2绑定,将ip地址和端口号绑定到套接字文件描述符24 if(bind(cfd,(struct sockaddr*)&cin,sizeof(cin))==-1)25 //文件描述符;26 //通信地址信息结构体,不同通信方式,结构体不同,将具体地址信息强转为该类型,地址27 //结构体大小,值28 {29 perror("bind error");30 return -1;31 }32 printf("bind success\n");33 //3.连接服务器34 //3.1填充要连接的服务器地址信息结构体35 struct sockaddr_in sin;36 sin.sin_family=AF_INET;//地址族IPv437 sin.sin_port=htons(SER_PORT);//端口号,主机号转换为网络号38 sin.sin_addr.s_addr=inet_addr(SER_IP);//ip地址,点分十进制转为4字节无符号网络字节序39 //3.2连接服务器40 if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))==-1)41 //套接字文件描述符42 //要发送数据起始地址43 //要发送数据大小44 //是否阻塞,0阻,MSG_DONTWAIT非阻塞45 {46 perror("connect error");47 return -1;48 }49 printf("connect success\n");50 //4.数据收发51 char rbuf[5]={0xff,0x02,0x00,0x00,0xff};52 //起始结束协议,固定的;控制机械臂协议,固定的53 //x指定操作机械臂,0x00红,0x01蓝;y:指定角度54 unsigned char bbuf[5]={0xff,0x02,0x01,0x00,0xff};55 //发送给服务器当做初始值56 send(cfd,rbuf,sizeof(rbuf),0);//文件描述符;要发送数据起始地址;数据大小;是否阻塞57 sleep(1);58 send(cfd,bbuf,sizeof(bbuf),0);59 char key=0;//接收键盘输入的字符60 while(1)61 {62 system("clear");//执行终端指令63 scanf("%c",&key);//键盘输入一个字符64 getchar();//吸收垃圾字符,回车65 switch(key)66 {67 //红色机械臂68 case 'W':69 case 'w':70 {71 rbuf[3]+=5;//每次操作角度增加5度72 if(rbuf[3]>=90)73 rbuf[3]=90;74 send(cfd,rbuf,sizeof(rbuf),0);75 }76 break;77 case 'S':78 case 's':79 {80 rbuf[3]-=5;//每次操作角度减小5度81 if(rbuf[3]<=-90)82 rbuf[3]=-90;83 send(cfd,rbuf,sizeof(rbuf),0);84 }85 break;86 //蓝色机械臂87 case 'D':88 case 'd':89 {90 bbuf[3]+=5;//每次操作角度增加91 if(bbuf[3]>=180)92 bbuf[3]=180;93 send(cfd,bbuf,sizeof(bbuf),0);94 }95 break;96 case 'A':97 case 'a':98 {99 bbuf[3]-=5;//每次操作角度减小
100 if(bbuf[3]<=0)
101 bbuf[3]=0;
102 send(cfd,bbuf,sizeof(bbuf),0);
103 }
104 break;
105 case 'Q':
106 case 'q':
107 goto END;
108 default:printf("enter error\n");
109 }
110 }
111 END:
112 //5.关闭套接字
113 close(cfd);
114 return 0;
115 }
~
~ 运行结果:
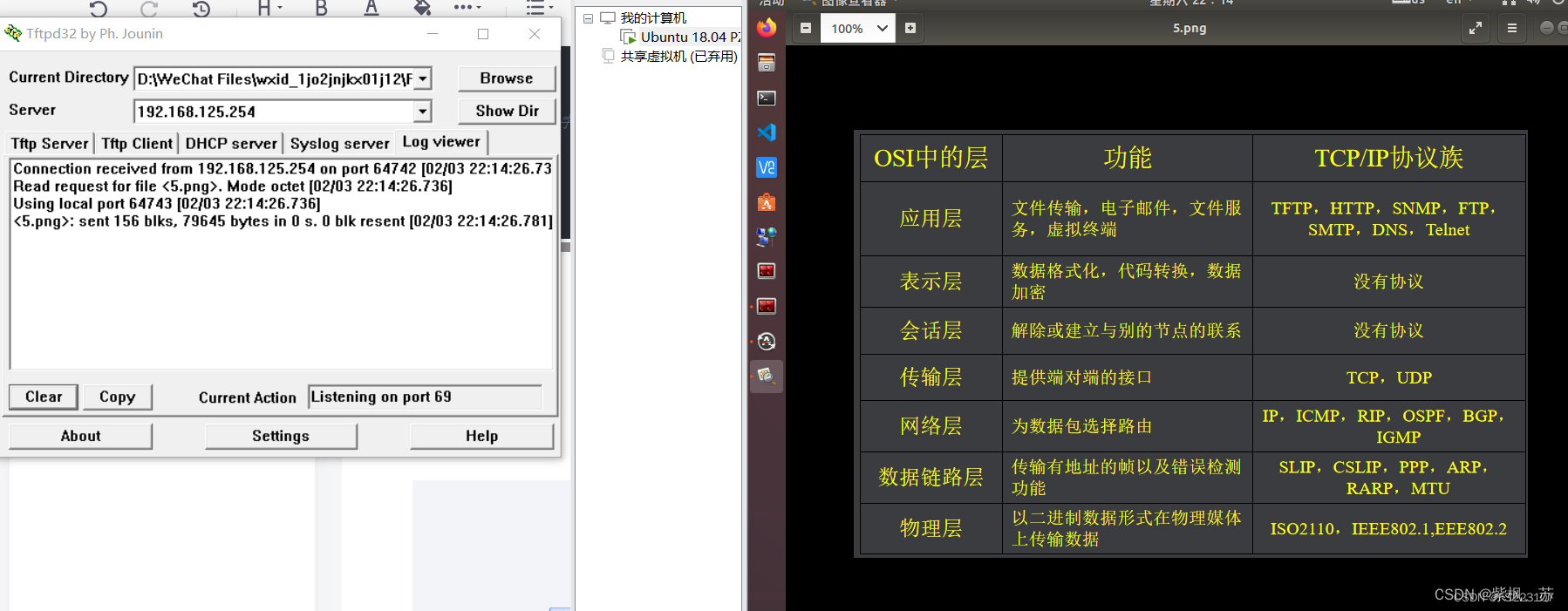
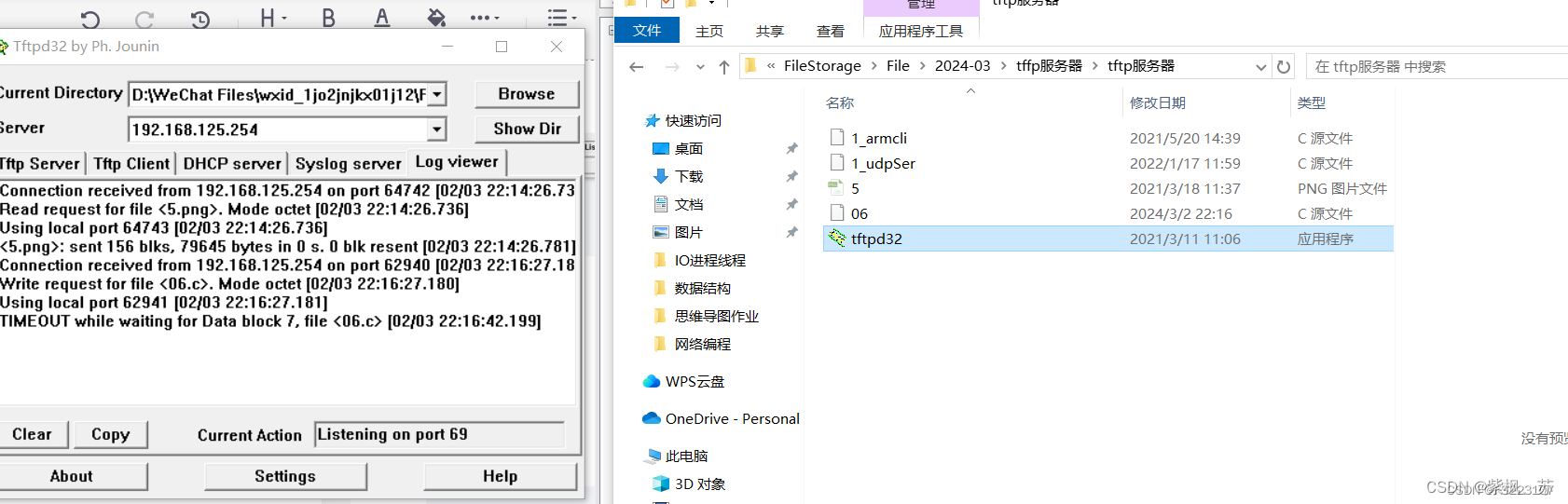
2. 基于UDP的TFTP文件传输
程序代码:
#include <myhead.h>
#define SER_IP "192.168.125.254" //服务端IP
#define SER_PORE 69 //端口号//定义下载函数
int download(int cfd,struct sockaddr_in sin)
{//组件协议包:下载请求char pack[516]="";short *p1=(short *)pack;*p1=htons(1); //设置操作码char file[20]="";printf("请输入文件名:");fgets(file,sizeof(file),stdin);file[strlen(file)-1]=0; char *p2=(pack+2);strcpy(p2,file); //文件名char *p4=p2+strlen(p2)+1;strcpy(p4,"octet"); //模式位int packlen=4+strlen(p2)+strlen(p4); //请求包大小printf("%d\n",packlen);//向服务器发送请求包sendto(cfd,pack,packlen,0,(struct sockaddr*)&sin,sizeof(sin));//以只写的形式打开文件int wfd=-1;if((wfd=open(file,O_WRONLY|O_CREAT|O_TRUNC,0664))==-1){perror("open error");return -1;}int res=0;struct sockaddr_in cin;socklen_t socklen=sizeof(cin);while(1){//收取服务器发来的数据包//判断数据包的操作码是否为3 以及 数据包数据内容是否为512字节//若为512字节,则读取后,回复一个应答包,继续接收下一个//如果小于512,则读取数据后,回复一个应答包,结束接收数据//清空协议包bzero(pack,sizeof(pack));res=recvfrom(cfd,pack,sizeof(pack),0,(struct sockaddr*)&cin,&socklen); //接收数据包if(*p1==ntohs(3)) //数据包{write(wfd,pack+4,res-4);//回复应答包*p1=htons(4);sendto(cfd,pack,4,0,(struct sockaddr*)&cin,sizeof(cin));if(res-4<512){printf("下载完成\n");break;}}else if(*p1==ntohs(5)) //错误包{printf("error\n");return -1;}}close(wfd);return 0;
}//定义上传函数
int upload(int cfd,struct sockaddr_in sin)
{//组件协议包:上传请求char pack[516]="";unsigned short *p1=(unsigned short *)pack;*p1=htons(2); //设置操作码char file[20]="";printf("请输入文件名:");fgets(file,sizeof(file),stdin);file[strlen(file)-1]=0; char *p2=(pack+2);strcpy(p2,file); //文件名char *p4=p2+strlen(p2)+1;strcpy(p4,"octet"); //模式位int packlen=4+strlen(p2)+strlen(p4); //请求包大小printf("%d\n",packlen);//向服务器发送请求包sendto(cfd,pack,packlen,0,(struct sockaddr*)&sin,sizeof(sin));//以只读的形式打开文件int rfd=-1;if((rfd=open(file,O_RDONLY,0664))==-1){perror("open error");return -1;}int res=0;struct sockaddr_in cin;socklen_t socklen=sizeof(cin);unsigned short num=0; //定义块编号;while(1){//清空bzero(pack,sizeof(pack));res=recvfrom(cfd,pack,sizeof(pack),0,(struct sockaddr*)&cin,&socklen);if(*p1==ntohs(4)) //接收应答包{//发送数据包*p1=htons(3);//填充块编号num++;*(p1+1)=htons(num);//读取数据res=read(rfd,p1+2,512);sendto(cfd,pack,sizeof(pack),0,(struct sockaddr*)&cin,sizeof(cin));if(res==0){printf("上传完成\n");break;}else if(res<0){printf("error\n");return -1;}}else if(*p1==ntohs(5)) //错误包{printf("error\n");return -1;}}close(rfd);return 0;
}int main(int argc, const char *argv[])
{/*//判断是否外部传参if(argc!=2){printf("unknow filename\n");return -1;}*///1.创建用于通信的套接字文件描述符int cfd=-1;if((cfd=socket(AF_INET,SOCK_DGRAM,0))==-1){perror("socket error");return -1;}//2.数据收发//填充服务器的地址信息结构体struct sockaddr_in sin;sin.sin_family=AF_INET;sin.sin_port=htons(SER_PORE);sin.sin_addr.s_addr=inet_addr(SER_IP);//创建菜单int menu=0;while(1){system("clear"); //执行终端指令printf("\t******1.下载******\n");printf("\t******2.上传********\n");printf("\t******3.退出******\n");printf("请输入选项:");scanf("%d",&menu);getchar();//吸收垃圾字符,回车switch(menu){case 1:{//下载download(cfd,sin); }break;case 2:{//上传upload(cfd,sin);}break;case 3:{//退出goto END;}break;default:printf("enter error\n");break;}}END://3.关闭套接字close(cfd);return 0;
}运行结果:
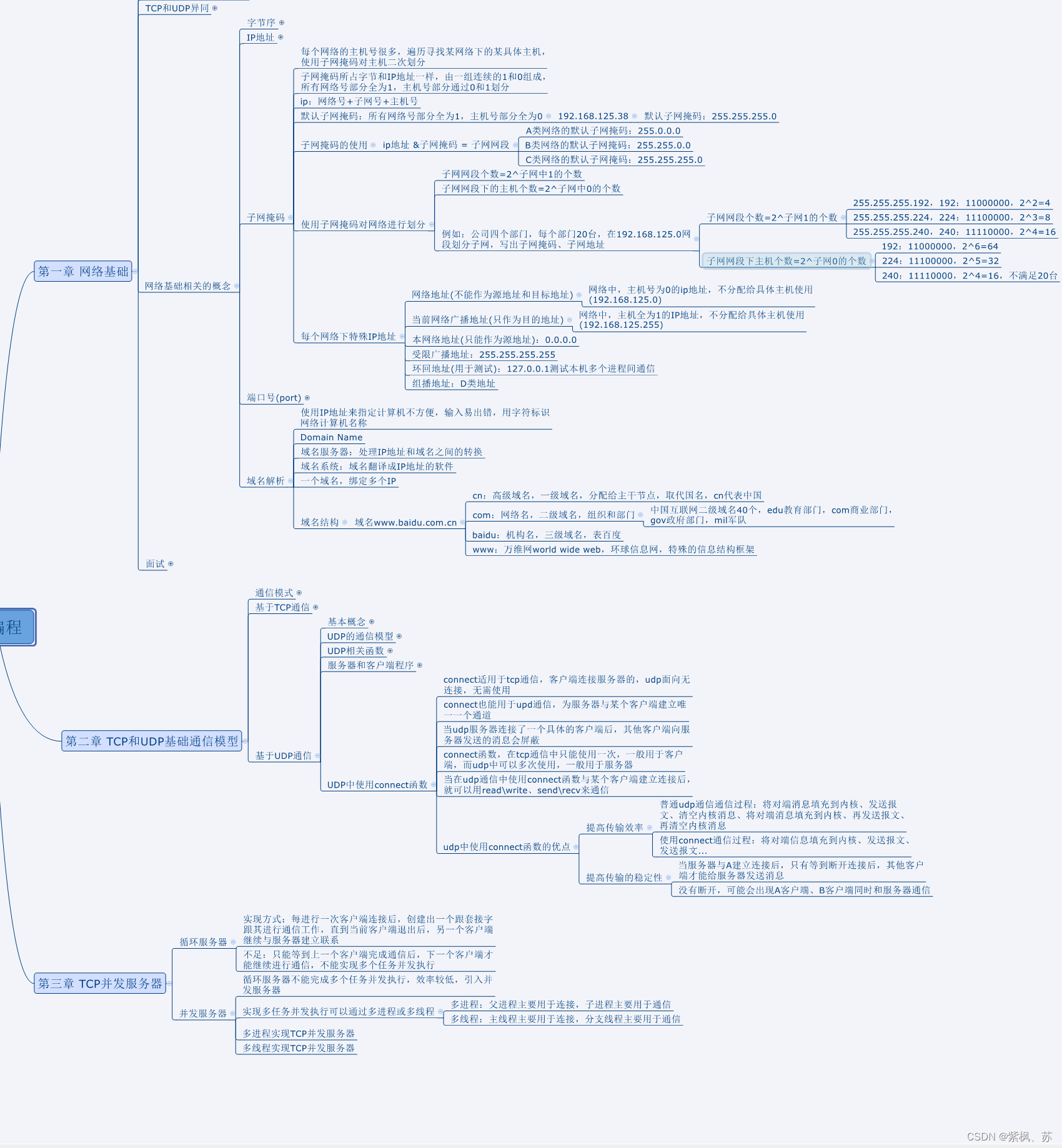
 流程图:
流程图:







![[项目设计] 从零实现的高并发内存池(二)](https://img-blog.csdnimg.cn/c446ebae288e480d84f5d14d494c88bb.gif)