(十八)RANdom SAmple Consensus(RANSAC)模型
假设我们正在查看的所有数据都由内部值和外部值(异常值)组成,其中内部值可以用一组特定参数值的模型来解释,而异常值则不适合该模型。RANSAC用于估计内部值的数学模型参数。
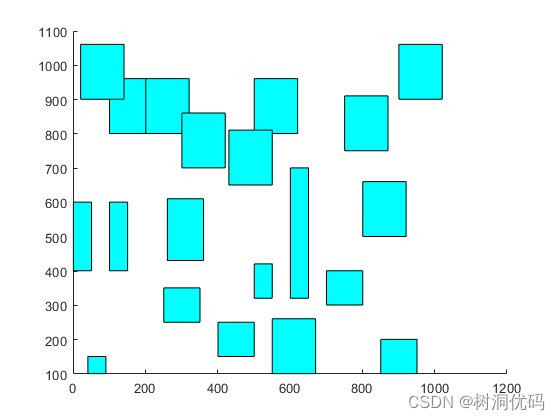
下面的图片展示了RANSAC算法在二维数据上的简单应用。左图是原始数据。右图中红色点代表异常值,蓝色点代表内部值,蓝线是RANSAC建模的结果。
| 原始数据 | RANSAC建模结果 |
|---|---|
 |  |
random_sample_consensus.cpp
#include <iostream>
#include <thread>#include <pcl/console/parse.h>
#include <pcl/point_cloud.h> // for PointCloud
#include <pcl/common/io.h> // for copyPointCloud
#include <pcl/point_types.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std::chrono_literals;pcl::visualization::PCLVisualizer::Ptr
simpleVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{// --------------------------------------------// -----Open 3D viewer and add point cloud-----// --------------------------------------------pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud");viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");//viewer->addCoordinateSystem (1.0, "global");viewer->initCameraParameters ();return (viewer);}int main(int argc, char** argv)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr final (new pcl::PointCloud<pcl::PointXYZ>);// 用特定模型生成点云,并随机加入一些异常点cloud->width = 500;cloud->height = 1;cloud->is_dense = false;cloud->points.resize (cloud->width * cloud->height);for (int i = 0; i <cloud->size (); ++i){if (pcl::console::find_argument (argc, argv, "-s") >= 0 || pcl::console::find_argument (argc, argv, "-sf") >= 0){(*cloud)[i].x = 1024 * rand () / (RAND_MAX + 1.0);(*cloud)[i].y = 1024 * rand () / (RAND_MAX + 1.0);if (i % 5 == 0) // 异常点(*cloud)[i].z = 1024 * rand () / (RAND_MAX + 1.0);else if (i % 2 == 0) // 上半球(*cloud)[i].z = sqrt( 1 - ((*cloud)[i].x * (*cloud)[i].x)- ((*cloud)[i].y * (*cloud)[i].y));else // // 下半体(*cloud)[i].z = - sqrt( 1 - ((*cloud)[i].x * (*cloud)[i].x)- ((*cloud)[i].y * (*cloud)[i].y));}else{(*cloud)[i].x = 1024 * rand () / (RAND_MAX + 1.0);(*cloud)[i].y = 1024 * rand () / (RAND_MAX + 1.0);if( i % 2 == 0) // 异常点(*cloud)[i].z = 1024 * rand () / (RAND_MAX + 1.0);else // 平面(*cloud)[i].z = -1 * ((*cloud)[i].x + (*cloud)[i].y);}}// 用于存储PointCloud中内部点的索引位置std::vector<int> inliers;// 使用平面或球体模型来构建RandomSampleConsensus对象。pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptrmodel_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ> (cloud));pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptrmodel_p (new pcl::SampleConsensusModelPlane<pcl::PointXYZ> (cloud));if(pcl::console::find_argument (argc, argv, "-f") >= 0) // 平面{pcl::RandomSampleConsensus<pcl::PointXYZ> ransac (model_p);ransac.setDistanceThreshold (.01);ransac.computeModel();ransac.getInliers(inliers);}else if (pcl::console::find_argument (argc, argv, "-sf") >= 0 ) // 球体{pcl::RandomSampleConsensus<pcl::PointXYZ> ransac (model_s);ransac.setDistanceThreshold (.01);ransac.computeModel();ransac.getInliers(inliers);}// 将内部点复制到finalpcl::copyPointCloud (*cloud, inliers, *final);// 在查看器中显示内部点或完整的点云云。pcl::visualization::PCLVisualizer::Ptr viewer;if (pcl::console::find_argument (argc, argv, "-f") >= 0 || pcl::console::find_argument (argc, argv, "-sf") >= 0)viewer = simpleVis(final);elseviewer = simpleVis(cloud);while (!viewer->wasStopped ()){viewer->spinOnce (100);std::this_thread::sleep_for(100ms);}return 0;}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)project(random_sample_consensus)find_package(PCL 1.2 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})add_executable (random_sample_consensus random_sample_consensus.cpp)
target_link_libraries (random_sample_consensus ${PCL_LIBRARIES})
编译并运行
$ ./random_sample_consensus
显示带有异常值的平面PointCloud。

$ ./random_sample_consensus -f
只展示平面模型上的点

在这个程序中还有一个使用球体的例子。如果您使用以下选项运行它:
$ ./random_sample_consensus -s
显示带有异常值的球形PointCloud。

$ ./random_sample_consensus -sf
只展示球体模型上的点
官方文档