0. 背景
在高速公路监控视频场景下,图像分辨率大都是1920 * 1080或者2560 * 1440,远处的物体(车辆和行人等)都比较小。考虑需要对图像进行拆分,然后把拆分后的数据统一送入模型中,推理的结果然后再做nms,恢复到原始图片数据中。
这个过程中牵涉到两个方面的内容,一个是多batch推理,一个是nms。
1. 多batch
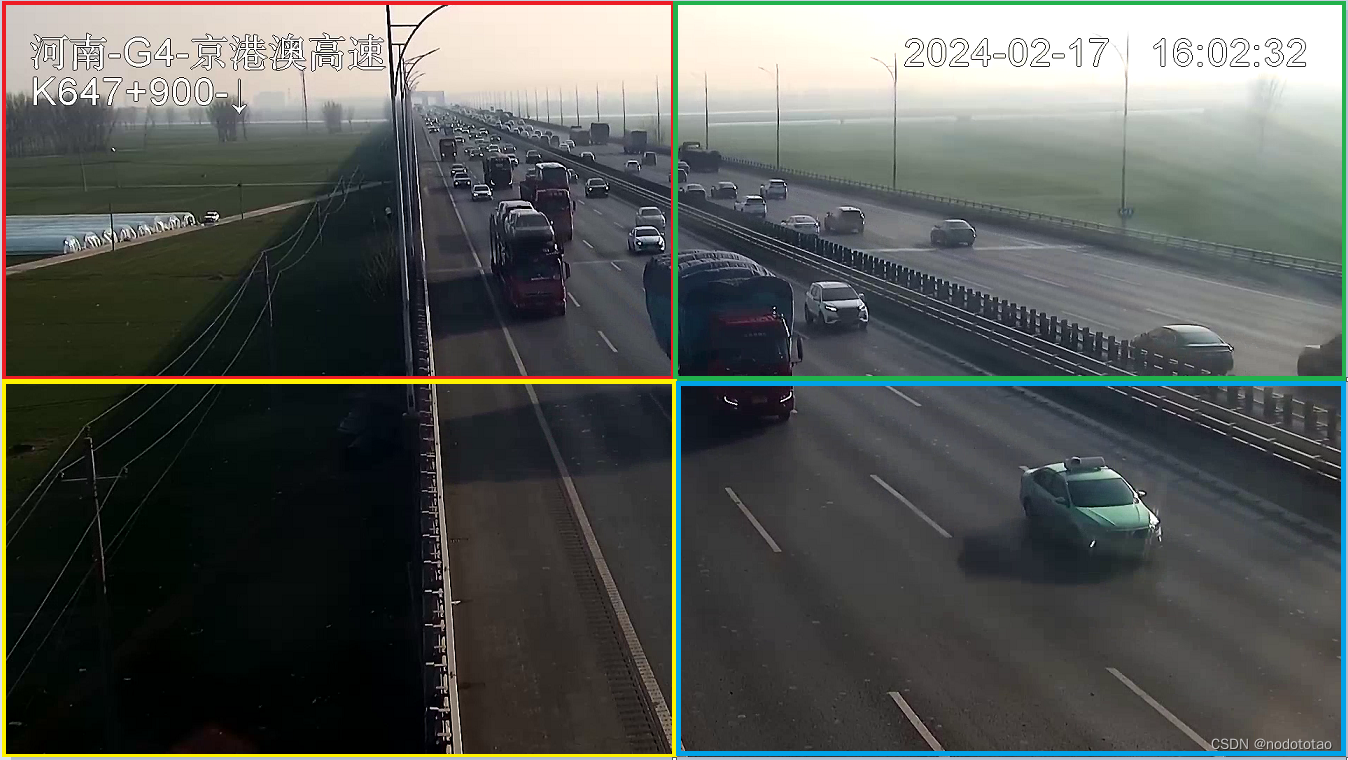
例如使用1920*1080分辨率的图片数据,把该分辨率的数据分为4份。
如果只是平均分车4份,当一个物体(比如车辆)正好处于图片中心时,则可能被拆分到4个区域,这样当后续这4个区域分别得到检测框后,无法对同一个拆分的物体进行完美覆盖。所以在拆分图片是,可用适当的大一些。
1.1 平均拆分
1.2 建议拆分
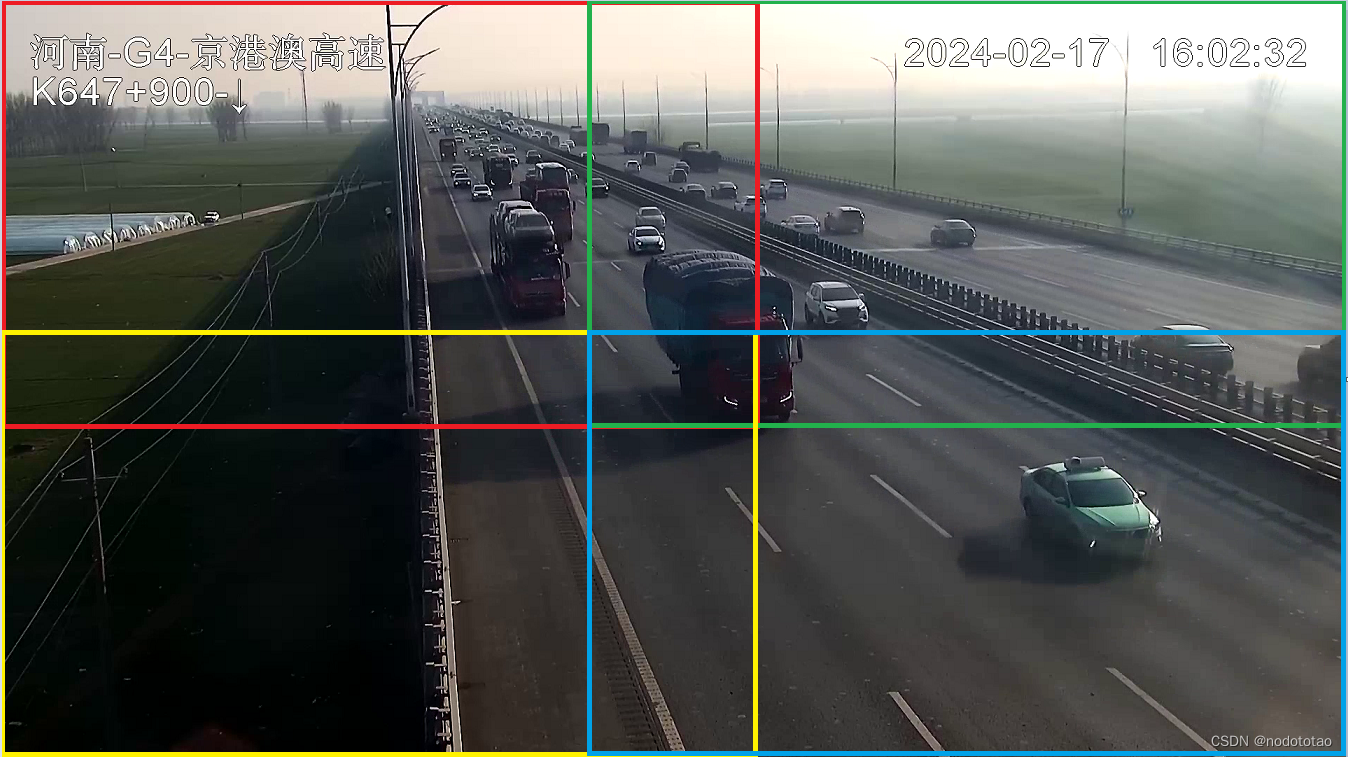
例如:1920*1080分辨率的图片,进行拆分
h1 = int(1080 * 7 / 16) h2 = int(1080 * 9 / 16) w1 = int(1920 * 7 / 16)w2 = int(1920 * 9 / 16)img0 = frame[0:h_2, 0:w_2].copy()img1 = frame[0:h_2, w_1:w].copy()img2 = frame[h_1:h, 0:w_2].copy()img3 = frame[h_1:h, w_1:w].copy()
2. yolov8中多batch推理的方式
因为刚使用yolov8不久,推理过程中的数据加载逻辑重新梳理了一下,做个记录
1)推理调用入口
results = model(source=frame, save=False, conf=conf, iou=nms, save_txt=False,show=False)
2)model定义
model = YOLO(MODEL)
3)YOLO类 (ultralytics/models/yolo/model.py)
from ultralytics import YOLO
class YOLO(Model):
4) Model基类
class Model(nn.Module):
(4.1)super().__init__()self._load(model, task)
(4.2)def __call__(self, source=None, stream=False, **kwargs):"""Calls the 'predict' function with given arguments to perform object detection."""return self.predict(source, stream, **kwargs)
(4.3)def predict(self, source=None, stream=False, predictor=None, **kwargs):if not self.predictor:self.predictor = (predictor or self._smart_load('predictor'))(overrides=args, _callbacks=self.callbacks)self.predictor.setup_model(model=self.model, verbose=is_cli)
(4.4)def _smart_load(self, key):"""Load model/trainer/validator/predictor."""try:return self.task_map[self.task][key] #detect\predictor# 根据(3)中YOLO类中的task_mape'detect': {'model': DetectionModel,'trainer': yolo.detect.DetectionTrainer,'validator': yolo.detect.DetectionValidator,'predictor': yolo.detect.DetectionPredictor, }, # 调用接口为yolo.detect.DetectionPredictor
5)class DetectionPredictor(BasePredictor)
6)BasePredictor#因为DetectionPredictor中只有后处理的方式,数据预处理的内容在BasePredictor基类中
(6.1)def __call__(self, source=None, model=None, stream=False, *args, **kwargs):"""Performs inference on an image or stream."""self.stream = streamif stream:return self.stream_inference(source, model, *args, **kwargs)else:return list(self.stream_inference(source, model, *args, **kwargs)) # merge list of Result into one
(6.2)def stream_inference(self, source=None, model=None, *args, **kwargs):# Setup source every time predict is calledself.setup_source(source if source is not None else self.args.source)
(6.3)def setup_source(self, source):self.dataset = load_inference_source(source=source,imgsz=self.imgsz,vid_stride=self.args.vid_stride,buffer=self.args.stream_buffer)
7) 数据处理方式
from ultralytics.data import load_inference_source
def load_inference_source(source=None, imgsz=640, vid_stride=1, buffer=False): dataset = LoadPilAndNumpy(source, imgsz=imgsz)8)最终的数据处理
class LoadPilAndNumpy:def __init__(self, im0, imgsz=640):"""Initialize PIL and Numpy Dataloader."""if not isinstance(im0, list):im0 = [im0]self.paths = [getattr(im, 'filename', f'image{i}.jpg') for i, im in enumerate(im0)]self.im0 = [self._single_check(im) for im in im0]#print(self.im0)self.imgsz = imgszself.mode = 'image'# Generate fake pathsself.bs = len(self.im0)
从上面的数据执行逻辑可用看出,推理入口的数据格式可以是一个列表形式。
这个列表中包含拆分后多个区域的数据
# 例如上面拆分为了4个部分,img0, img1, img2, img3
imgs = []
imgs.append(img0)
imgs.append(img1)
imgs.append(img2)
imgs.append(img3)
resultss = model(source=imgs, save=False, conf=conf, iou=nms, save_txt=False, show=False)
最后的结果为4个batch图片数据对应的检测结果
ress0 = resultss[0].tojson()
datas0 = json.loads(ress0)ress1 = resultss[1].tojson()
datas1 = json.loads(ress1)ress2 = resultss[2].tojson()
datas2 = json.loads(ress2)ress3 = resultss[3].tojson()
datas3 = json.loads(ress3)
3. nms处理
因为4部分区域拆分时,是有重合的部分,故在4部分区域推理出结果后,还需要进行一次NMS。
# results:为4个拆分区域检测结果的合集,iou_thresh: iou计算的阈值
def nms(results, iou_thresh):grouped_results = {}# 把results的内容,根据cls的分类情况组合。因为最终做nms时需要区分是不是同一个类别for cls_boxes in results:x1, y1, x2, y2, score, cls = cls_boxesif cls not in grouped_results:grouped_results[cls] = []grouped_results[cls].append([x1, y1, x2, y2, score])#print(grouped_results)keep_boxes = []# 遍历所有的键值对for cls, boxes_l in grouped_results.items():boxes = np.array(boxes_l)# 每个 box 的坐标和置信度x1 = boxes[:, 0]y1 = boxes[:, 1]x2 = boxes[:, 2]y2 = boxes[:, 3]scores = boxes[:, 4]# 每个 box 的面积areas = (y2 - y1 + 1) * (x2 - x1 + 1)# keep_boxes 用于存放执行 NMS 后剩余的 boxes# 取出置信度从大到小排列的索引,其中 scores.argsort() 返回的是数组值从小到大的索引index = scores.argsort()[::-1]while len(index) > 0:# 取出置信度最大的 box,将其放入 keep 中,并判断其他 box 是否可以与之合并i = index[0]boxes_l[i].append(cls)keep_boxes.append(boxes_l[i])# np.maximum(arr:list, x:int)表示计算arr中每一个元素与常数 x 之间的最大值x1_overlap = np.maximum(x1[i], x1[index[1:]])y1_overlap = np.maximum(y1[i], y1[index[1:]])x2_overlap = np.minimum(x2[i], x2[index[1:]])y2_overlap = np.minimum(y2[i], y2[index[1:]])# 计算重叠部分的面积,若没有不重叠部分则面积为 0w = np.maximum(0, x2_overlap - x1_overlap + 1)h = np.maximum(0, y2_overlap - y1_overlap + 1)overlap_area = w * h# 计算 iou(交并比)ious = overlap_area / (areas[i] + areas[index[1:]] - overlap_area)# 因为在拆分时,某个物体可能只有很小一部分,这个小的区域的检测框与正常物体的检测框的# 交集占比小于iou_thresh,则这边小的区域就不会被去除。所以添加下面两个iou数值,用于# 判断某个重叠部分的区域是不是跟检测框的大小类似,从而去除该检测框的值。iou1 = overlap_area / areas[i]iou2 = overlap_area / areas[index[1:]]# 合并重叠度最大的 box,即只保留 iou < iou_thresh 的 box# 因为 np.where(ious <= iou_thresh) 的数据结构是 tuple 里面包含了一个 list,所以要用 [0] 取出 list# 添加条件2,3是为了解决,同一个物体被分隔后,目标框只是物体的小一部分,nms时遗漏condition1 = ious <= iou_threshcondition2 = iou1 < 0.8condition3 = iou2 < 0.8idx = np.where(condition1 & condition2 & condition3)[0]# 这里将需要idx + 1,由于index 是 ious 的索引,而 ious 是去除掉 index 的第一个元素对应的 box 得到的,# 所以 ious 的索引 +1 对应的 box 才是 index 相同索引对应的 index# 因为 len(ious)<=len(index),所以 len(index[idx + 1])<=len(index),所以 while 循环中 index 的元素数量越来越少index = index[idx + 1]return keep_boxes
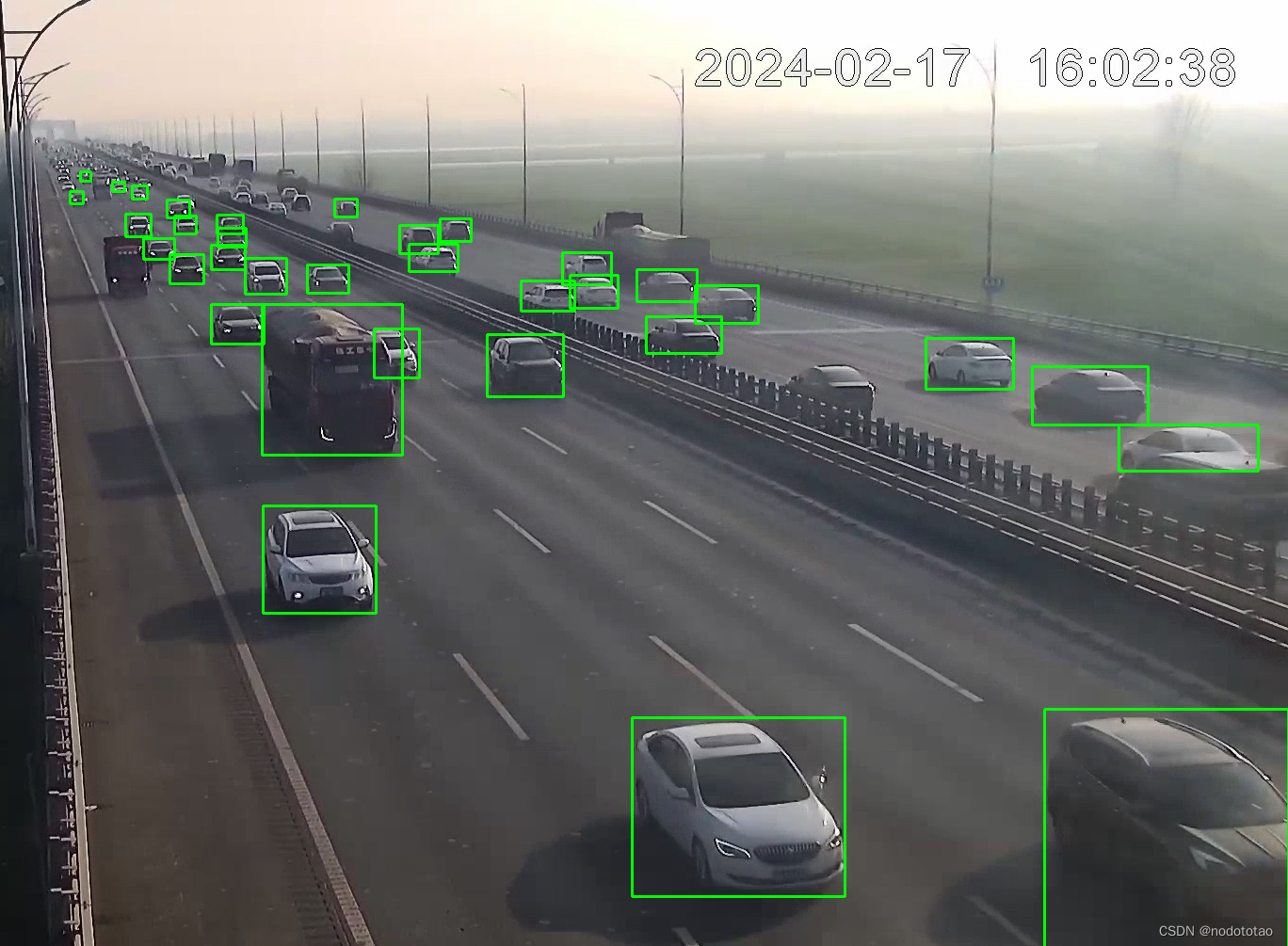
4. 示例
nms前
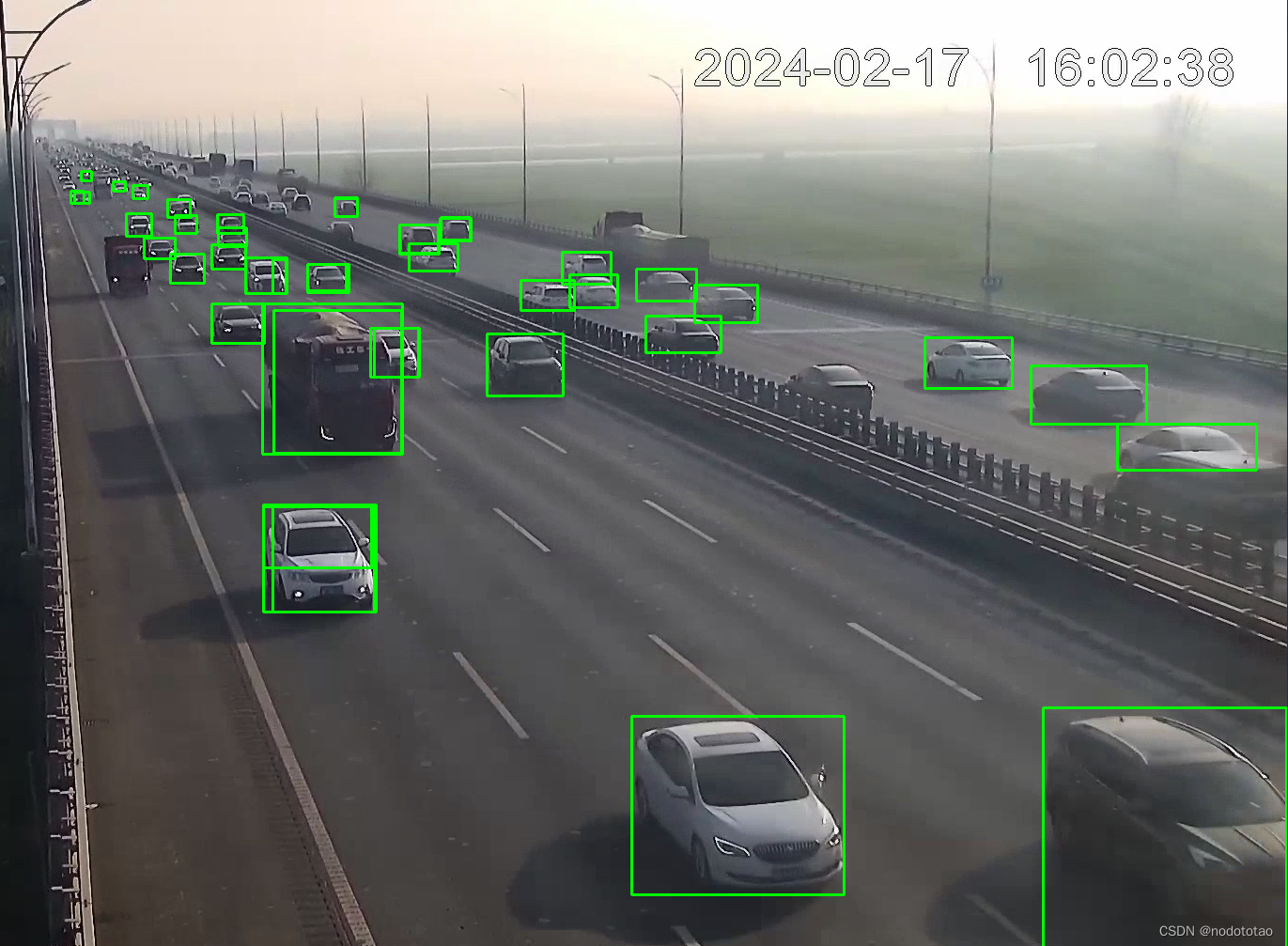
nms处理后
nms前

nms处理后