ⅠOBD
1.OBD接口
OBD有16个引脚,每个引脚的电压不同(可以对应不同的协议)
车端: 16- 9 (短一点点的)
8-1 (长一点的)
2.基于OBDⅡ的通信协议
CAN (ISO-15765)对应的引脚是6-14
J1850
①PWM 对应的引脚是2 -10
②VPW 对应引脚2
K-line
①ISO 9141-2 对应引脚 7 -15 or 1 2
②14230-5(KWP2000)对应引脚7-15
CAN
SO15765-2定义了诊断模型中TP网络传输层对于不同CAN报文格式单帧和多帧的处理方式。ISO15765目的是为了解决ISO 11898协议中定义的经典CAN数据链路层与ISO 14229协议中定义的应用层,彼此之间数据长度不统一的问题
ISO 标准化的 CAN 协议
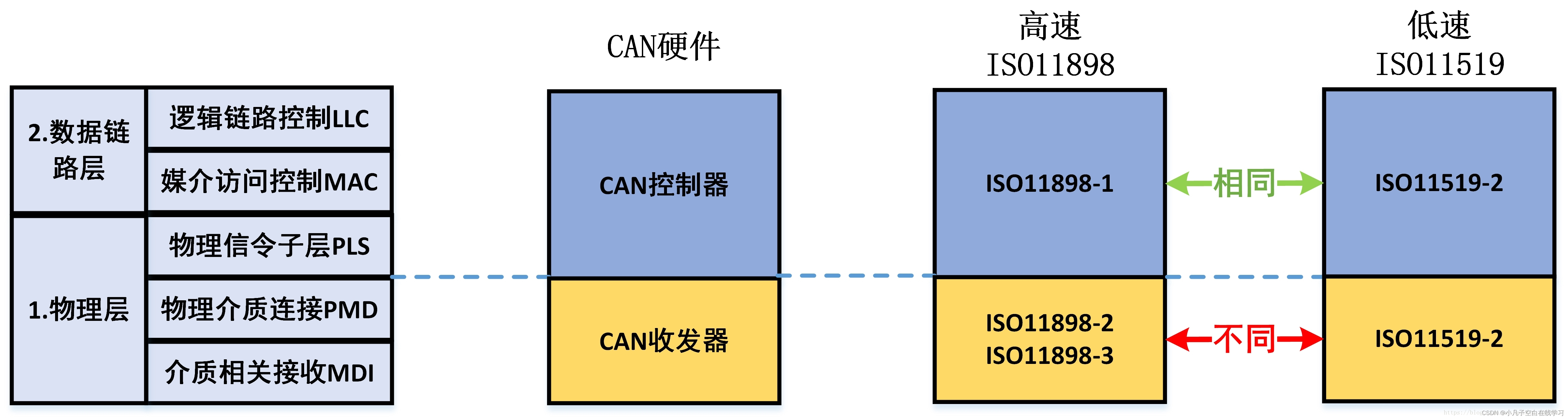
CAN 协议经 ISO 标准化后有 ISO11898 标准和 ISO11519-2 标准两种。 ISO11898 和 ISO11519-2 标准对于数据链路层的定义相同,但物理层不同
ISO11898 是通信速度为 125kbps-1Mbps 的 CAN 高速通信标准。目前, ISO11898 追加新规约后,成为 ISO11898-1 新标准。
(1) 关于 ISO11898
(2) 关于 ISO11519ISO11519 是通信速度为 125kbps 以下的 CAN 低速通信标准。ISO11519-2 是 ISO11519-1 追加新规约后的版本。
物理层和数据链路层

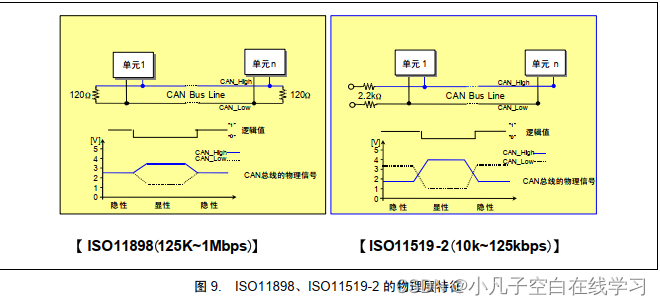
CAN总线信号
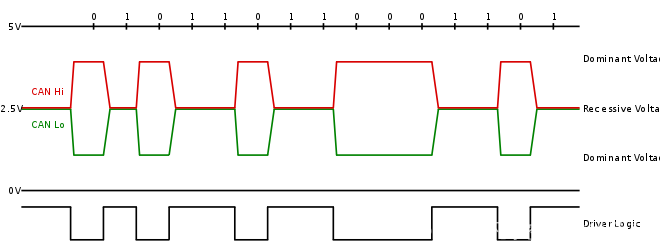
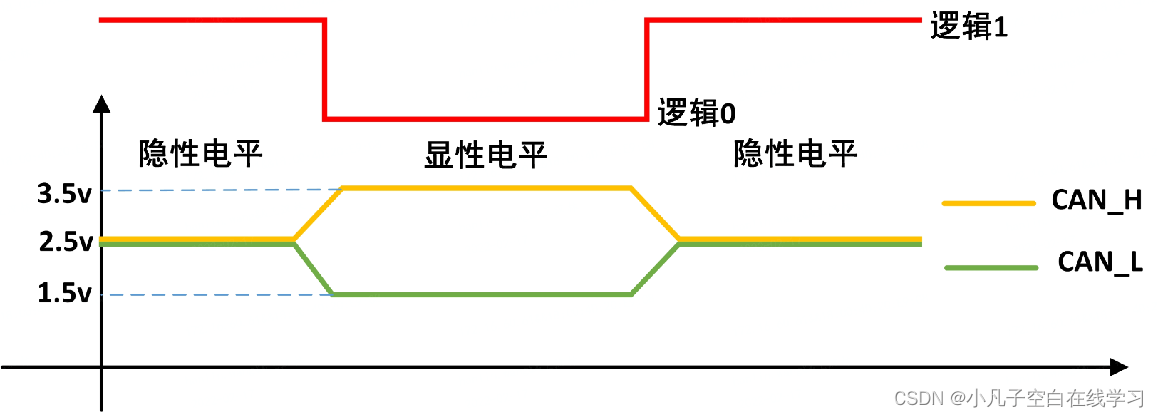
ISO 11898-2,也称为高速度CAN。它在总线的两端均接有120Ω电阻。
高速CAN总线在传输显性(0)信号时,会将CAN_H端抬向5V高电平,将CAN_L拉向0V低电平。当传输隐性(1)信号时,并不会驱动 CAN_H或者CAN_L端。 显性信号CAN_H和CAN_L两端差分标称电压为2V。 终端电阻在没有驱动时,将差分标称电压降回0V。显性信号(0)的共模电压需要在1.5V到3.5V之间。隐性信号(1)的共模电压需要在+/-12V。
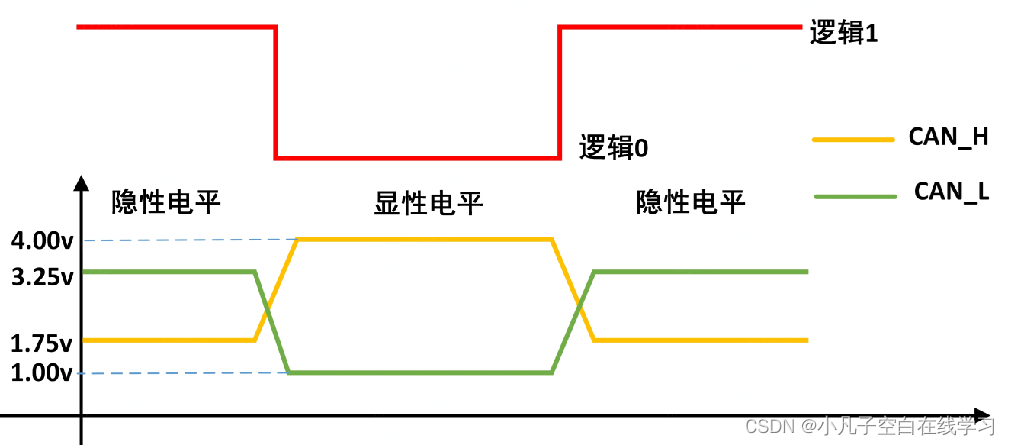
ISO 11519 低速/容错CAN信号在传输显性信号(0)时,驱动CANH端抬向5V,将CANL端降向0V。在传输隐性信号(1)时并不驱动CAN 总线的任何一端。在电源电压Vcc为5V时,显性信号差分电压需要大于2.3V,隐性信号的差分电压需要小于0.6V。CAN总线两端未被驱动时,终端电 阻使CANL端回归到RTH电压(当电源电压Vcc为5V时,RTH电压至少为Vcc-0.3V=4.7V),同时使CANH端回归至RTL电压(RTL 电压最大为0.3V)。两根线需要能够承受-27V至40V的电压而不被损坏。
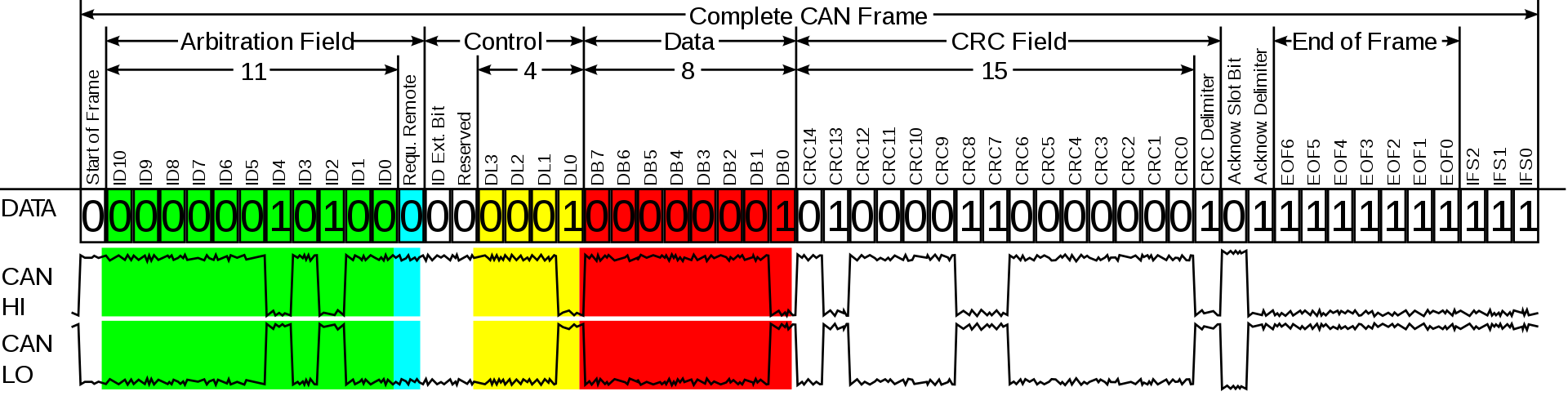
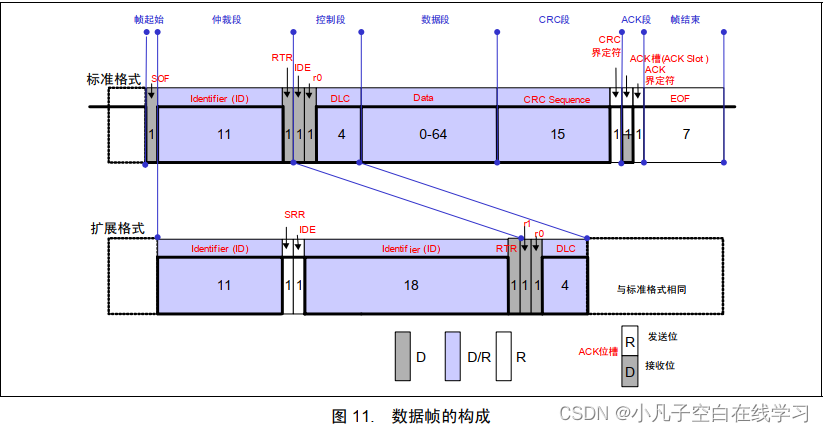
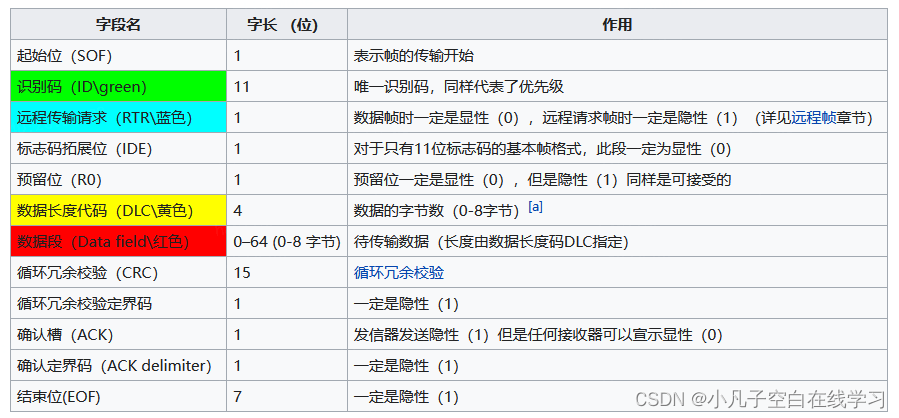
帧格式
CAN总线的数据帧有标准帧和扩展帧两种格式,区别在于标准帧具有 11-bit 的帧ID,扩展帧具有 29-bit 的帧ID;
位填充
无论何时,发送器只要检测到位流中有5个连续相同逻辑的位,便会自动在位流中插入一个补码位。所以当有五个连续的相同逻辑位那么第六位的数据要舍弃
作用:
1.CAN网络同步需要足够多的上升沿,这是CAN协议规定位填充的目的之一。
2.确保数据帧不会被当作错误帧(由6个连续的显性或隐性位组成)、确保正确识别帧结束标志(7个连续隐性位)。
15765-2
根据ISO-TP中的描述,Can帧主要分四类:单帧(Singal frame, SF),首帧(First frame, FF), 连续帧(Consecutive frame, CF), 流控帧(Flow control frame, FC);
单帧:值为0,其长度可为8个字节(value值占1个字节 + 7个表示正常地址字节,一般我们遇到主要就是类型的)或7个字节(value值占1个字节 + 6个扩展地址字节);
首帧:其值为1, 用于长的、已被分割的多帧消息包中。首帧包括整个包的数据长度,以及数据初始值;
连续帧:其值为2,包含多帧消息包后续子序列的数据帧;
流控帧:其值为3, 是由接收方在确认收到首帧(FF)后发起的响应。其约定了后续连接帧(CF)的传输参数;BS 块大小 ST时间
K-line
ISO 9141
ISO 14230
这两个好像差不多 好像是关键字不同
KWP2000只有三个子层有定义说明,即:应用层、数据链路层、物理层。并且这三个层分别由ISO-14230-1、ISO-14230-2、ISO-14230-3定义标准,所以一直都这么说,ISO-14230就是基于K线的KWP2000。 K线KWP2000协议是异步半双工进行通讯的,通常采用10416BPS的波特率;空闲电平通常为12V。
|(1) 应用层 ISO-14230-1
KWP2000 |(2) 数据链路层 ISO-14230-2
|(3) 物理层 ISO-14230-3
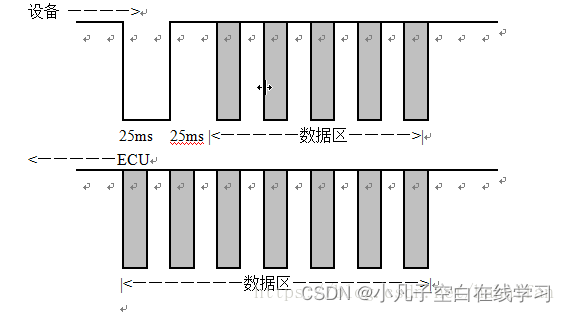
1、系统进入初始化
有两种初始化方式,主要是用第一种初始化。由设备先发送25ms的拉低电平,然后是25ms的高电平(空闲电平),然后再发送系统进入数据,系统进入数据通常为5个字节,ECU响应7个字节,完成系统初始化交互。请参见下图:
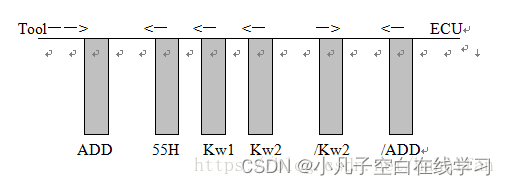
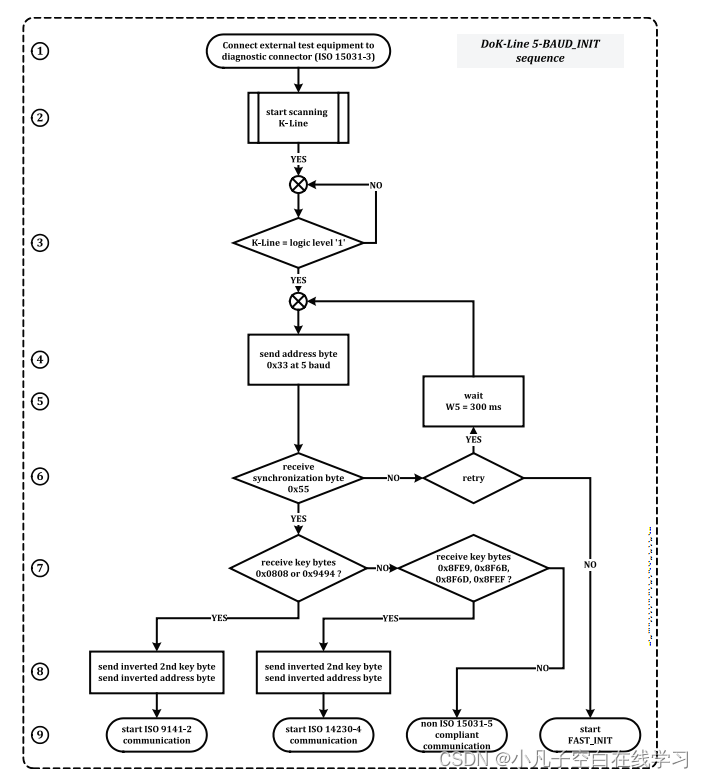
第二种初始化方式为设备发送5BPS或者200BPS的地址码,ECU响应55H,KW1,KW2,设备对KW2取反发回给ECU,ECU对地址码取反发回给设备,完成系统初始化交互。其中55H这个字节用来规定后面的通信波特率。参见下图
2、帧结构
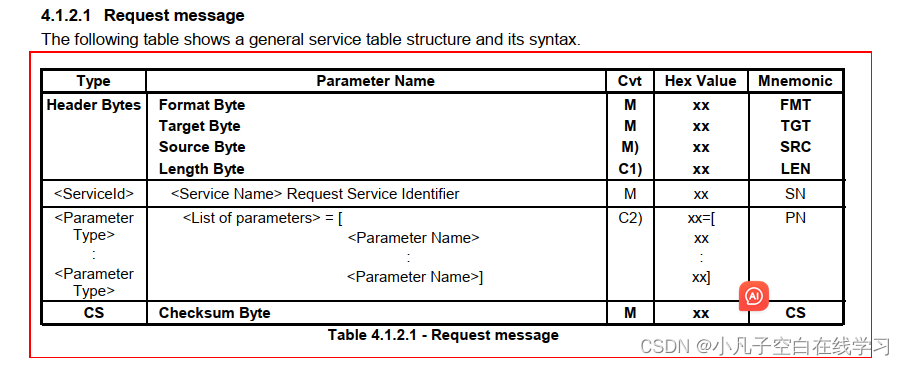
命令头(1个或多个字节)+命令体(1个或多个字节)+校验(通常为和校验)
在命令头中,包括以下几个部分的内容:格式+目标地址+源地址+长度字节。长度信息有时候在格式字节中体现,则不需要另外的长度字节,长度信息用以表示命令体的内容;目标地址和源地址有时候也会没有。
命令体的内容中:命令字+命令内容。命令内容可以没有。
举例如下:
81H 11H F1H 81H 04H
第一个字节81H为格式+长度信息(80+1)
第二个字节11H为目标地址
第三个字节F1H为源地址
第四个字节81H为命令字,表示系统进入
最后一个字节04H为前面4个字节的校验和
同样,也可能表现如下:(命令字)
80H 11H F1H 01H 3EH C1H
这种情况下,长度字节放在源地址之后
还可能表现为:
02H 1AH 9AH B6H
这种情况下,格式字节和目标地址源地址都已经没有了
还有一种特殊的情况,在上一种情况的基础上,在帧数据之前,加一个00,例如:
00H 02H 1AH 9AH B6H
但这种帧结构的情况极少
3、命令交互
命令交互通常情况下为1对1,但也存在1对多或者多对1的情况。下面是一组命令交互举例:
Tools: 81H 31H F1H 81H 24H
ECU: 83H F1H 31H C1H E9H 8FH DEH
在交互中,因为发送命令的对象不一样,所以目标地址和源地址是进行了互换;
同时,ECU响应设备的命令字在设备命令字的基础上 + 0x40(肯定回答)
还有否定回答,即回复 7F
Tools: 0x81, 0x11, 0xF1, 0x81, 0x04,
ECU: 0x83, 0xF1, 0x11, 0x7F, 0x81, 0x21, 0xA6,
4、交互时间参数
设备发送命令字节间的时间间隔P1,通常为5ms
ECU返回命令字节间的时间间隔P2,通常为0ms
设备发送完一帧命令后等待ECU响应的时间P3,通常为75ms~90ms
设备接收到ECU响应后到发送下一帧命令的时间P4,通常为20ms~26ms
5、常用命令字
系统进入:81H
系统退出:82H
链路保持:3EH
读故障码:18H
清除故障码:14H
读版本信息:1AH
读数据流:21H
6、数据格式
发送一字节的数据格式为(重点):
起始位 + 数据 + 停止位
1 + 8 + 1
如下:

————————————————
原文链接:https://blog.csdn.net/haha1fan/article/details/78007839
报文格式
UART???
这个不知道和14230与9141有什么关系
J1850
PWM
VPW
这好像用的很少 等遇到了再看

![[LeetCode][LCR149]彩灯装饰记录 I——二叉树的层序遍历](https://img-blog.csdnimg.cn/direct/51c8641a0c534cb59148b76f378e15d0.png)