目录
- Ubuntu20.04 + QT5.14.2 + VTK8.2.0 + PCL 1.10 环境配置
- 一、VTK 编译和安装
- 1、库依赖:
- 2、下载资源:[下载VTK8.2.0](https://www.vtk.org/files/release/8.2/VTK-8.2.0.tar.gz)
- 3、编译:
- 4、安装
- 5、qtcreator 配置编译的`libQVTKWidgetPlugin.so`
- 二、PCL安装
- 1、一键安装
- 2、测试
- 三、qt 中使用 vtk 显示点云图
- 1、pro 中引入依赖
Ubuntu20.04 + QT5.14.2 + VTK8.2.0 + PCL 1.10 环境配置
一、VTK 编译和安装
1、库依赖:
# X11
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
# OpenGL
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev
# cmake && cmake-gui
sudo apt-get install cmake cmake-gui
sudo apt install -y libxt-dev
sudo apt install -y cmake-qt-gui
sudo apt install build-essential cmake
2、下载资源:下载VTK8.2.0
3、编译:
- 创建build文件夹
cd VTK-8.2.0
mkdir build
cd build
- 使用
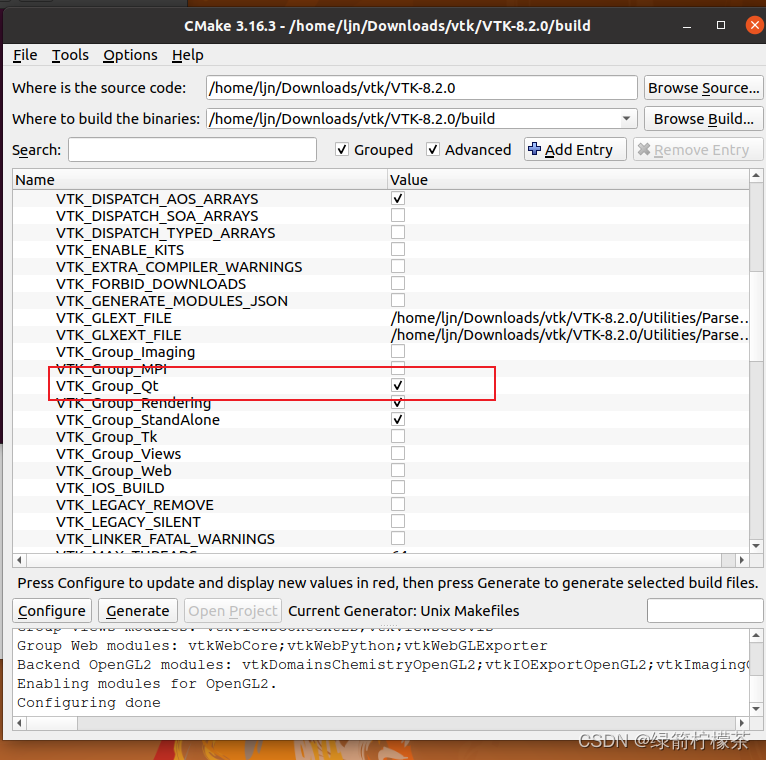
cmake-gui编译:设置源码目录和输出目录,勾选Group和Adavanced,点击configure,按下图设置
cmake-gui

- 第一次点击configure后,勾选“VTK-Group-Qt”,点击“Configure”;完成后,显示“Configuring done”;
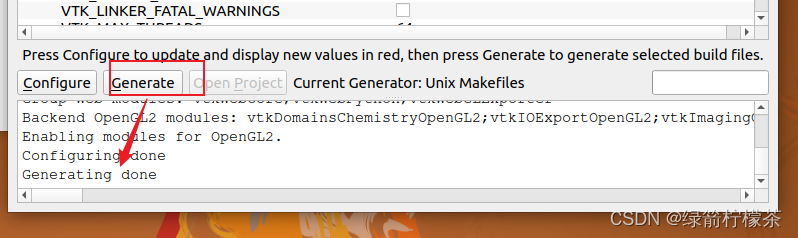
- 最后点击“Generate”;显示“Generating done”,完成。
4、安装
make -j4
sudo make install
5、qtcreator 配置编译的libQVTKWidgetPlugin.so
-
libQVTKWidgetPlugin.so路径/build/libcd ./lib -
添加到qtcreator中,
libQVTKWidgetPlugin.so复制到qt路径下,sudo cp libQVTKWidgetPlugin.so /home/ljn/Qt5.14.2/Tools/QtCreator/lib/Qt/plugins/designer

二、PCL安装
1、一键安装
sudo apt install libpcl-dev
会默认安装 vtk 和 eigne,后面我使用的是自己安装的vtk-8.2,默认安装目录在 /usr/local/include
2、测试
-
文件结构

-
CMakeLists.txt
cmake_minimum_required(VERSION 2.6) project(pcl_test)find_package(PCL 1.10 REQUIRED)include_directories(${PCL_INCLUDE_DIRS}) link_directories(${PCL_LIBRARY_DIRS}) add_definitions(${PCL_DEFINITIONS})add_executable(pcl_test pcl_test.cpp)target_link_libraries (pcl_test ${PCL_LIBRARIES})install(TARGETS pcl_test RUNTIME DESTINATION bin) -
pcl_test.cpp
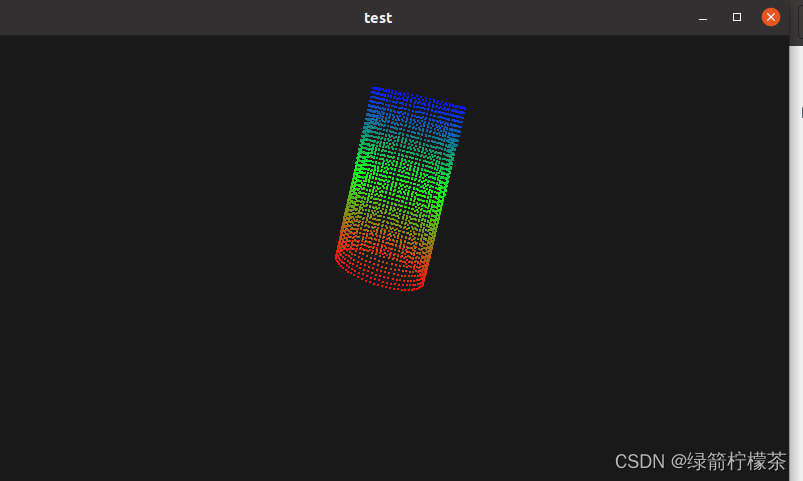
#include <iostream> #include <pcl/common/common_headers.h> #include <pcl/io/pcd_io.h> #include <pcl/visualization/pcl_visualizer.h> #include <pcl/visualization/cloud_viewer.h> #include <pcl/console/parse.h>int main(int argc, char **argv) {std::cout << "Test PCL !!!" << std::endl;pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);uint8_t r(255), g(15), b(15);for (float z(-1.0); z <= 1.0; z += 0.05){for (float angle(0.0); angle <= 360.0; angle += 5.0){pcl::PointXYZRGB point;point.x = 0.5 * cosf (pcl::deg2rad(angle));point.y = sinf (pcl::deg2rad(angle));point.z = z;uint32_t rgb = (static_cast<uint32_t>(r) << 16 |static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));point.rgb = *reinterpret_cast<float*>(&rgb);point_cloud_ptr->points.push_back (point);}if (z < 0.0){r -= 12;g += 12;}else{g -= 12;b += 12;}}point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();point_cloud_ptr->height = 1;pcl::visualization::CloudViewer viewer ("test");viewer.showCloud(point_cloud_ptr);while (!viewer.wasStopped()){ };return 0; } -
编译测试
mkdir build cd build cmake .. make ./pcl_text -
运行结果
三、qt 中使用 vtk 显示点云图
1、pro 中引入依赖
根据自身安装的版本引入相关依赖
INCLUDEPATH += /usr/include/boost
LIBS += /usr/lib/x86_64-linux-gnu/libboost_*.soINCLUDEPATH += /usr/include/pcl-1.10/
LIBS += /usr/lib/x86_64-linux-gnu/libpcl_*.soINCLUDEPATH += /usr/include/vtk-7.1
LIBS += /usr/lib/x86_64-linux-gnu/libvtk*.soINCLUDEPATH += /usr/include/eigen3