运行环境
- Linux:Ubuntu18.04
- ros:Melodic
- Ceres Solver 2.0.0(Ubuntu18.04安装Ceres)
- PCL 1.8.1(Ubuntu系统的PCL、Eigen卸载和安装)
- gtsam-4.0.0-alpha2 或者 4.0.2
1 背景介绍
在自动驾驶的感知方案中,激光雷达是一个公认的精度高、探测距离远的传感器,适用于对周围环境的精确感知。激光雷达在工作时,采用激光扫描周围环境,返回点云数据。得到了周围环境的点云数据之后,需要对它进行处理。那么激光SLAM便是进行这个操作。激光SLAM是根据点云匹配来进行定位和建图。
现阶段,比较有名的三维激光SLAM算法有LOAM系和谷歌的cartographer。LOAM系包含了LOAM、LeGO-LOAM、LIO-SAM等一系列算法。先简要的介绍一下各个算法(主要是参考文章1)。
1.1 Cartographer
Cartographer是由谷歌于2016年开源的一个支持ROS的室内SLAM库,并在截至目前为止,仍然处于不断的更新维护之中。
特点:代码极为工程,多态、继承、层层封装的十分完善。提供了方便的接口,便于接入IMU、(单/多线)雷达、里程计、甚至为二维码辅助等视觉识别方式也预留了接口(Landmark)。
1.2 LOAM
LOAM为清华自动化本科毕业的Zhang Ji博士在CMU读博期间,于2014年在RSS期刊发表的关于三维激光传感器的SLAM算法。
特点:Cartographer主要解决室内问题,LOAM室内外都可以,但是没有回环检测,在具有旋转场景会有建图不准确的情况。LOAM的代码量相比Cartographer要小很多,文件结构相对简单。
1.3 LeGO-LOAM
LeGO-LOAM是TiXiao Shan发表在IROS2018的文章,文章叫:可变地形下的轻量级和地面优化的雷达里程计与建图。其是以LOAM为框架衍生出的新算法,主要在于两点提升:轻量级 和 地面优化
特点:LeGO-LOAM具有回环检测能力,缺点是依赖地面。
1.3 LIO-SAM
LIO-SAM是TixiaoShan在2020年IROS发表的Lego-LOAM续作。 它是Lego-LOAM的扩展版本,添加了IMU预积分因子和GPS因子。LOAM和LeGO-LOAM是纯依靠激光雷达点云SLAM,而LIO-SAM结合了Lidar、IMU和GPS。
1.4 LVI-SAM
LVI-SAM为Lego-LOAM和LIO-SAM作者Tixiao Shan的最新工作,发表在ICRA 2021上。其提出了一个基于图优化的多传感器融合框架,具有多个子系统: 视觉惯性子系统(VIS) 和 雷达惯性子系统 (LIS); 单目+雷达+imu融合
具有鲁棒性:任一子系统失效,不会导致整个系统挂掉。
LVI所采用的回环检测,与大多数视觉SLAM所采取的回环检测方法相同,为词袋模型。与LeGO-LOAM,LIO-LOAM等工作相比,这种方式可以在地图数据库中找到回环,而无需知道当前运动的历史轨迹。
一、安装依赖
1.安装ROS的依赖
sudo apt-get install -y ros-melodic-navigation
sudo apt-get install -y ros-melodic-robot-localization
sudo apt-get install -y ros-melodic-robot-state-publisher
2.安装因子图优化库gtsam(注意以下二选一即可,只是版本稍有不同)
wget -O ~/Downloads/gtsam.zip https://ghproxy.com/https://github.com/borglab/gtsam/archive/4.0.2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.2/
mkdir build && cd build
cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF ..
sudo make install -j8
作者给出的代码中,直接wget github地址来下载gtsam会很慢,这里我在gtsam的github地址前面加了代理网址https://ghproxy.com/,能够显著加速下载 当然,也可以不用 ghproxy.com 像下文一样。
或者
wget wget -O ~/software/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/software && unzip gtsam.zip -d ~/software/
cd ~/software/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install二、安装LIO-SAM和下载数据集
1.创建一个catkin_ws_liosam工作空间
makdir -p ~/catkin_ws_liosam/src2.下载源码并编译
cd ~/catkin_ws_liosam/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd ..
catkin_make
3.下载数据集
LIO-SAM的作者提供了几个数据集进行测试,这里下载其中的walk数据集。作者提供地址是https://drive.google.com/drive/folders/1gJHwfdHCRdjP7vuT556pv8atqrCJPbUq,其下载速度感人,我这里只有十几kb/s,而这个数据集有3.7G。可以到我这里分享的百度网盘链接下载:百度网盘 请输入提取码
提取码:gz7i
下载好数据集后,保存到自己指定的地址。这里,我保存到~/catkin_ws_liosam/src/data。
三、运行LIO-SLAM
进入 catkin_ws_liosam 工作空间
roslaunch lio-sam run.launch
问题一、运行报错:
RLException: [run.launch] is neither a launch file in package [LIO-SAM] nor is [LIO-SAM] a launch file name
The traceback for the exception was written to the log file
按照网上现有对这个问题的解决方法:方法1,在工作空间下source。方法2:对其进行路径添加。
这个问题的来源还有一种来源,你得确定你在终端运行的这个launch文件名是否写对,打开自己的launch文件检查,如<arg name="project" default="lio_sam"/>中的lio_sam(不要在终端中写成lio-sam),在按照网上跑历程时,网上的代码可能会有细节上的出错,细心点

问题二:如果出现以下错误
这里我碰到一个问题,输入上述命令后出现报错。错误显示找不到文件libmetis.so。网上搜索后大致了解到,这个libmetis.so应该是LIO-SAM需要动态链接的一个文件。在ubuntu系统文件夹下搜索到libmetis.so存放在usr/local/lib文件夹下。猜想可能系统默认的动态链接地址为usr/lib文件夹,导致运行LIO-SAM时在usr/lib文件夹中找不到libmetis.so。
解决方法:采用如下命令将libmetis.so复制到usr/lib文件夹中:
sudo cp usr/local/lib/libmetis.so usr/lib/libmetis.so
再次启动run.launch,程序不再报错
1.正确命令如下:
roslaunch lio_sam run.launch运行完上述命令后,rviz弹出
2.播放数据包
新开一个终端,直接输入如下命令
rosbag play ~/catkin_ws_liosam/src/data/casual_walk.bag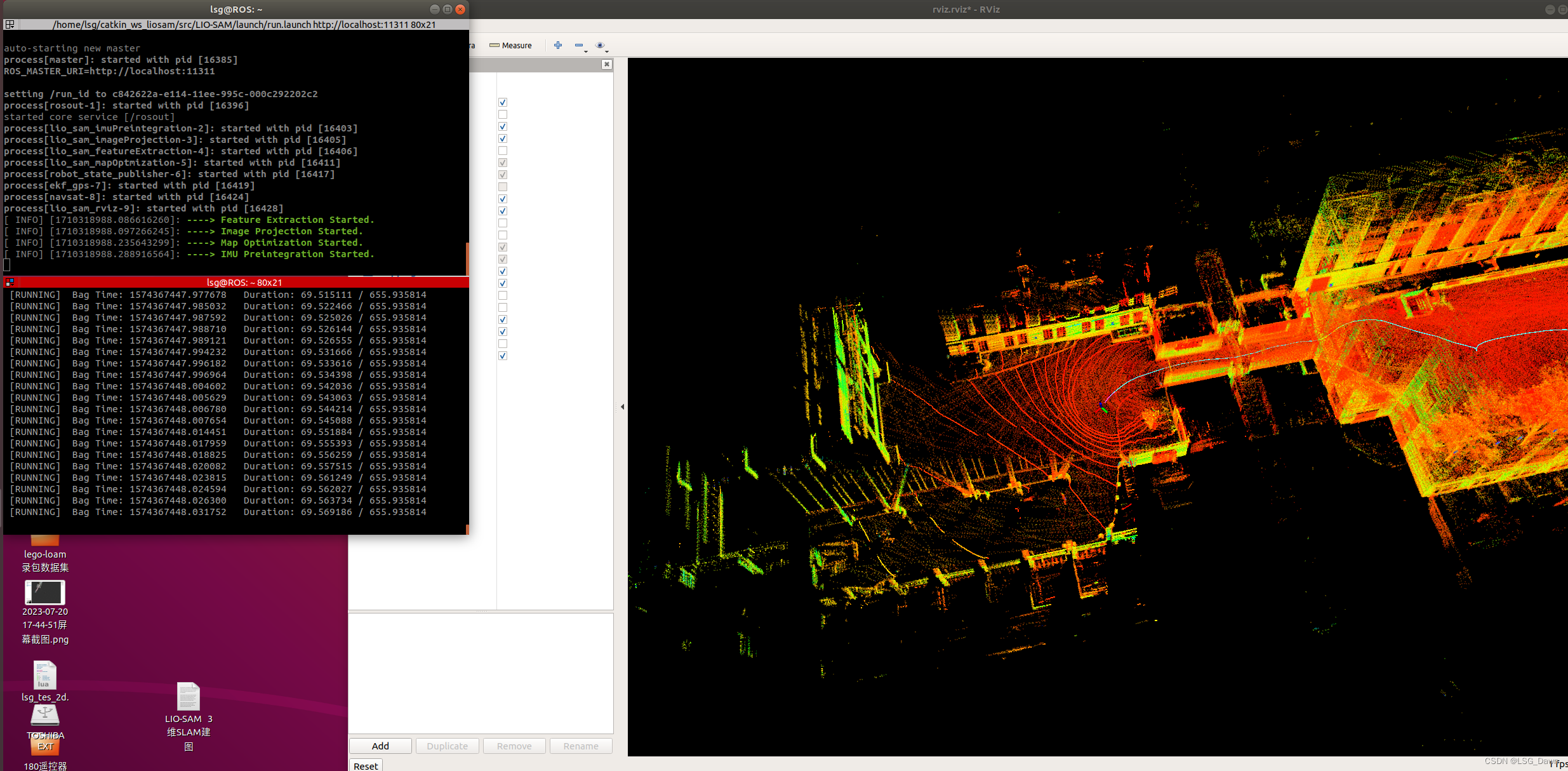
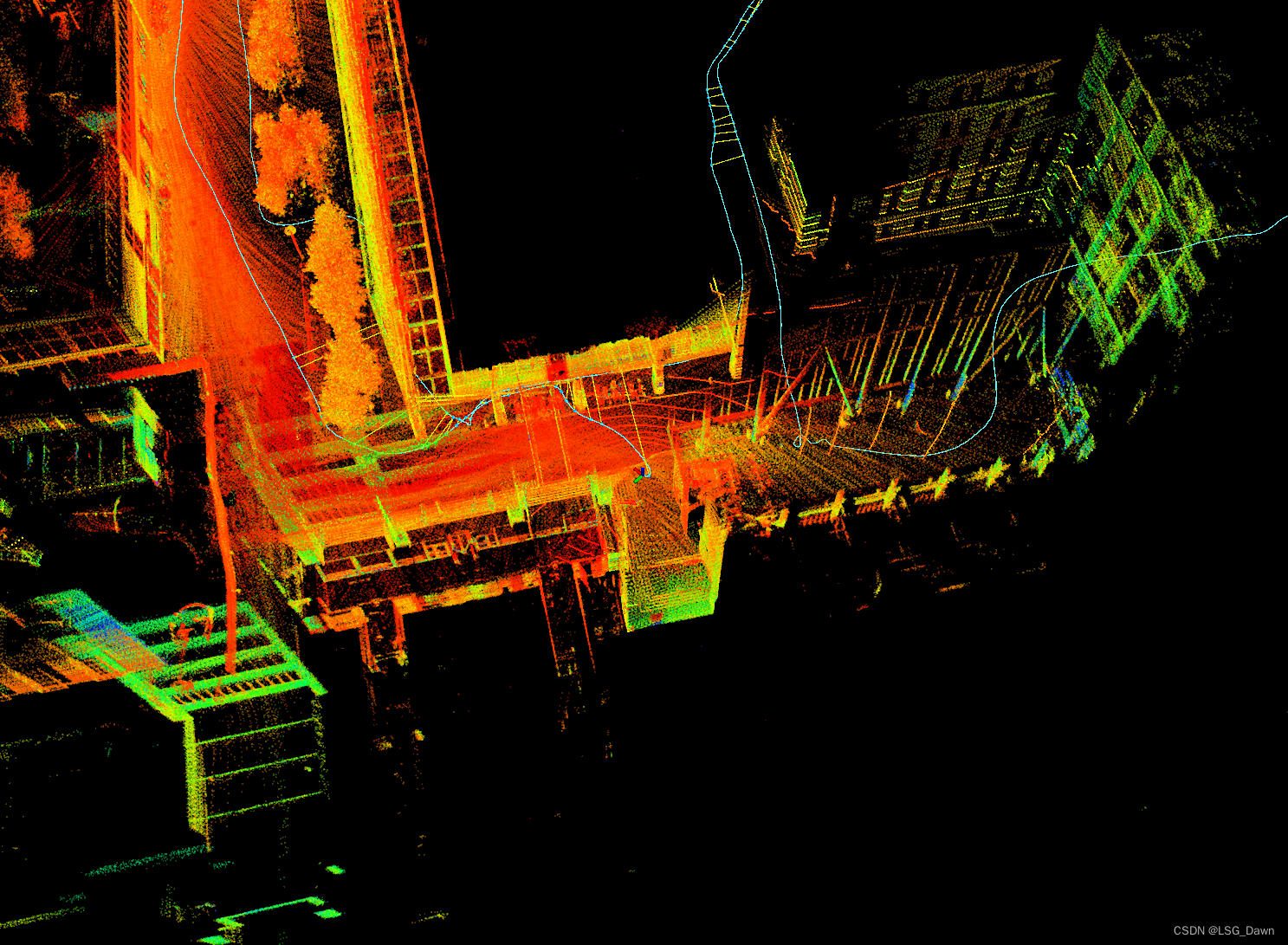
lio-sam三维SLAM建图
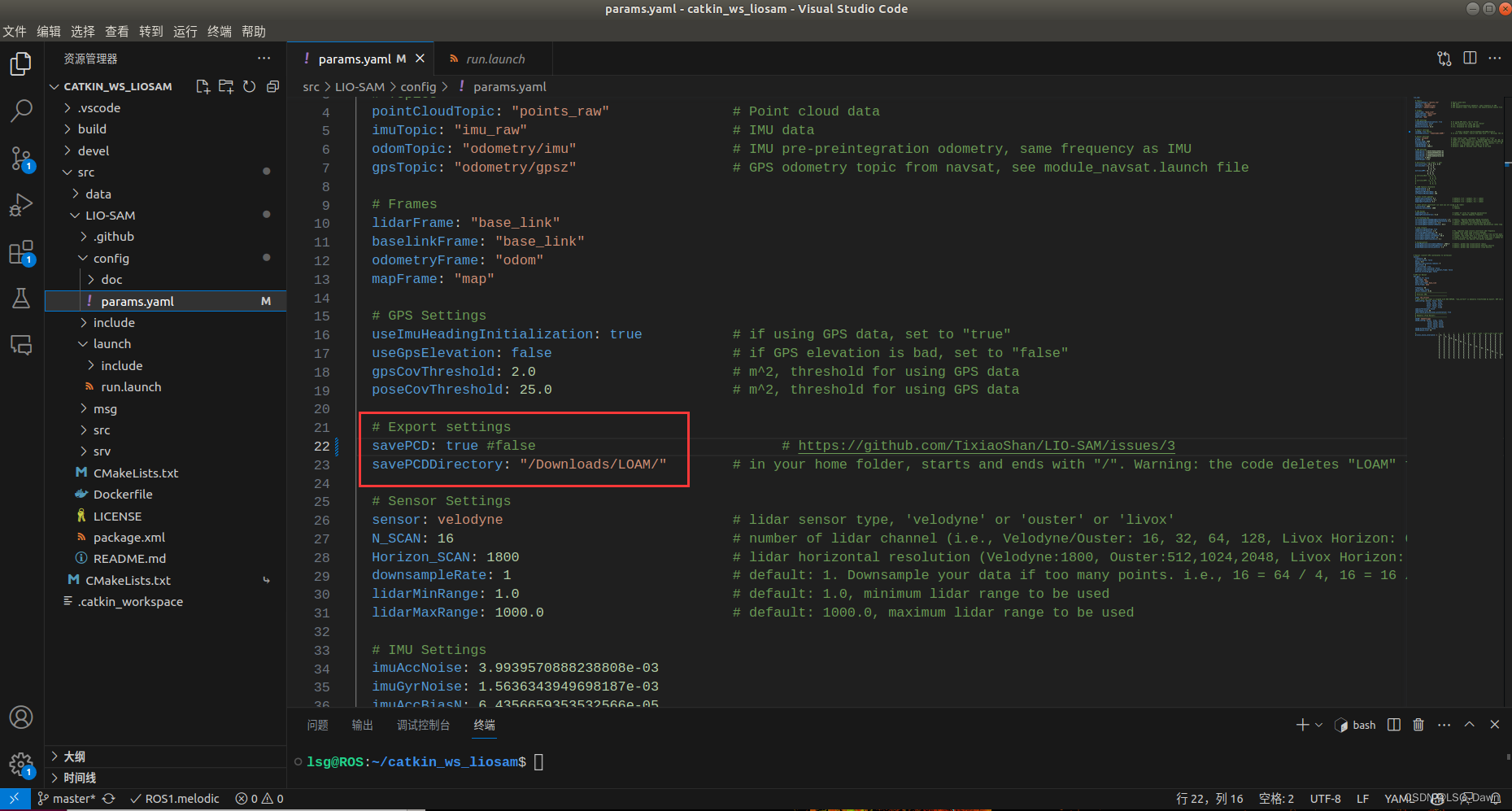
3.保存pcd建图结果
(1)需要修改params.yaml中的参数。params.yaml在~/catkin_ws/src/LIO-SAM/config文件夹下。修改该文件中SavePCD:true 和保存地址
(2)为了避免保存还没完成,ros就已经关闭了节点,需要设置_TIMEOUT_SIGINT的值。按如下命令打开文件:
sudo gedit /opt/ros/melodic/lib/python2.7/dist-packages/roslaunch/nodeprocess.py
在文件中找到_TIMEOUT_SIGINT,并设置为100秒。
这样,在命令窗口中按下Ctrl+C来结束run.launch的运行时,便会自动将pcd文件保存到指定地址。
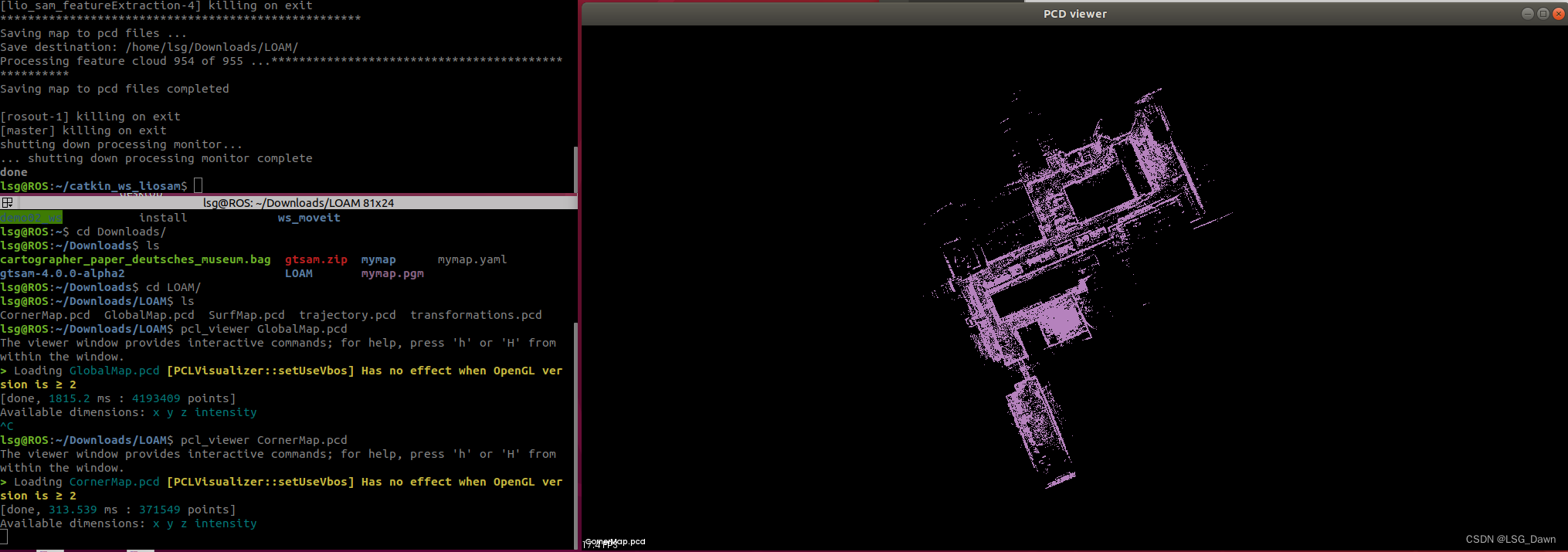
(3)新开一个终端,进入到 ~/Downloads/LOAM$
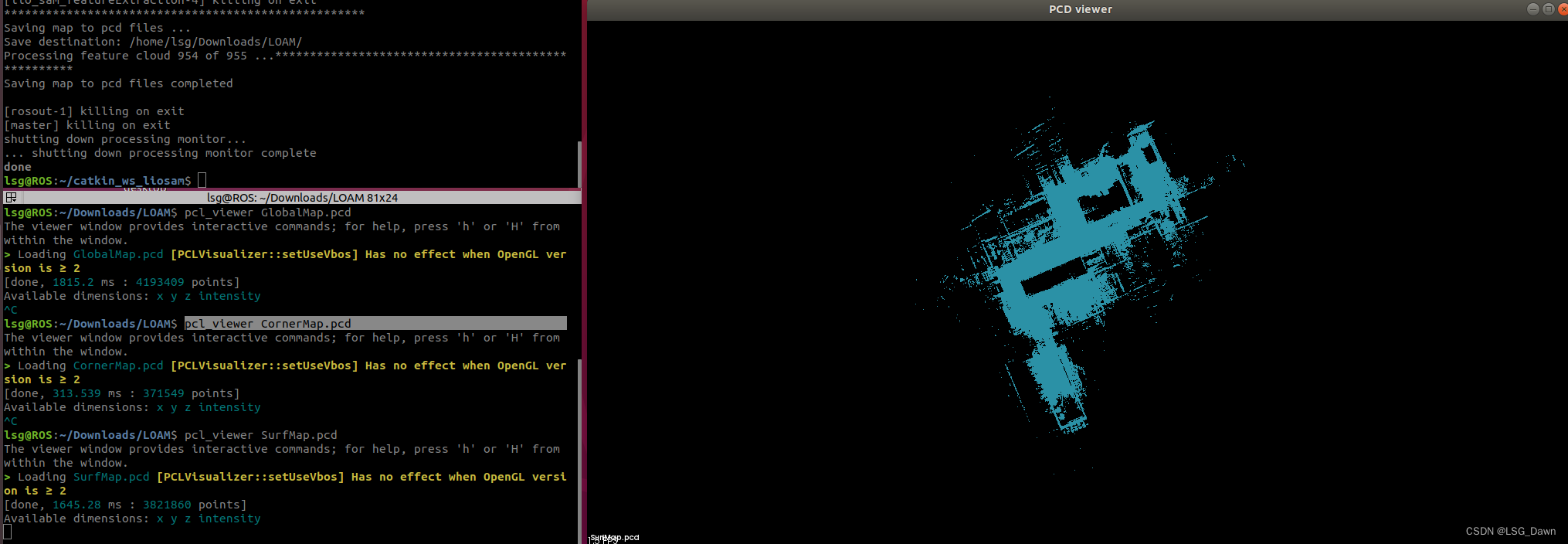
pcl_viewer GlobalMap.pcd 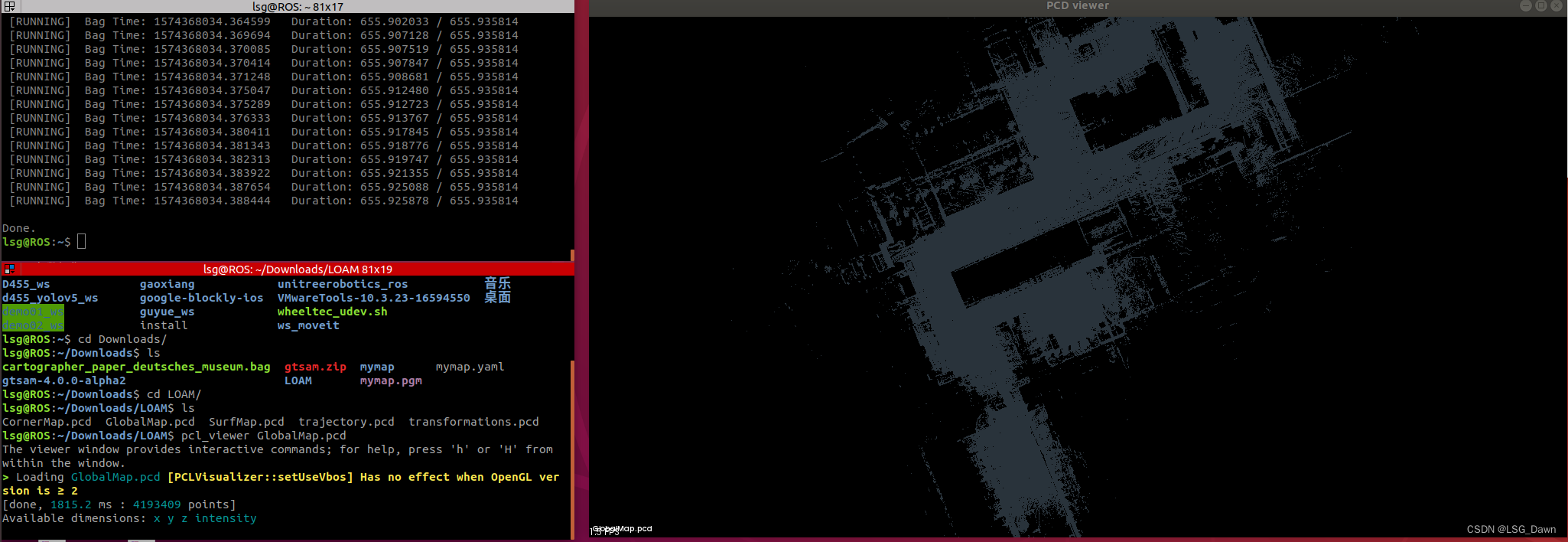
pcl_viewer CornerMap.pcd
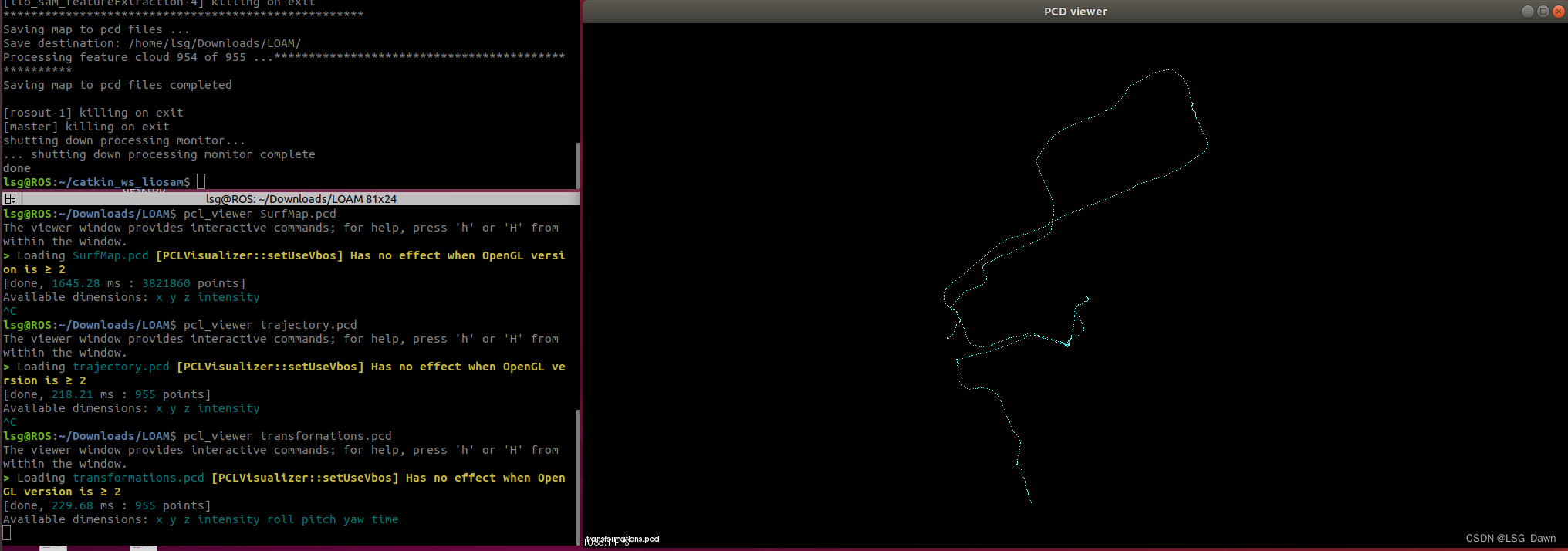
pcl_viewer SurfMap.pcd
pcl_viewer trajectory.pcd

pcl_viewer transformations.pcd

参考文献:
3维SLAM入门 LIO-SAM的安装与运行 ubuntu18.04+ros melodic_lio_sam编译提示找不到gtsam-CSDN博客
SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别_cartographer需要imu吗-CSDN博客