在双电极气体保护金属弧焊 (DE-GMAW) 中,对焊枪和旁路电极位置的精确控制是至关重要的。为了这一过程,科研团队提出了安装微型惯性测量单元(IMU)传感器和摄像头,来记录焊工控制焊枪的移动和微调。
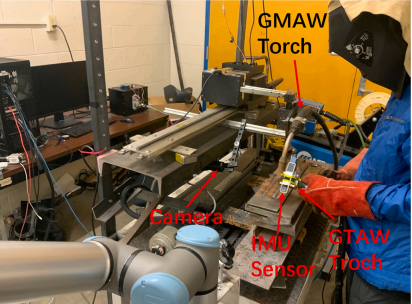
在学习人类焊工操作的实验系统中,IMU传感器安装在焊枪上。深度学习模型通过焊缝图像和IMU传感器数据进行训练。这种设置使得科研团队能够轻易获得大量用于模型训练的数据。通过这种方法,机器人可以学习焊工通过关注焊缝图像中的弧光,来对焊枪位置和姿态进行精确调整。采用这一革新技术,可以进行更精确的焊接操作。