(Windows)Colmap 具体使用教程可参考我的这篇博文
windows+colmap实现SFM三维重建位姿估计-CSDN博客
下面只是matching参数解释
Matching这个阶段很重要,匹配方式不同会对最终结果影响很大,要根据实际情况选择合适的匹配方式。下面是各个参数的详细解释。
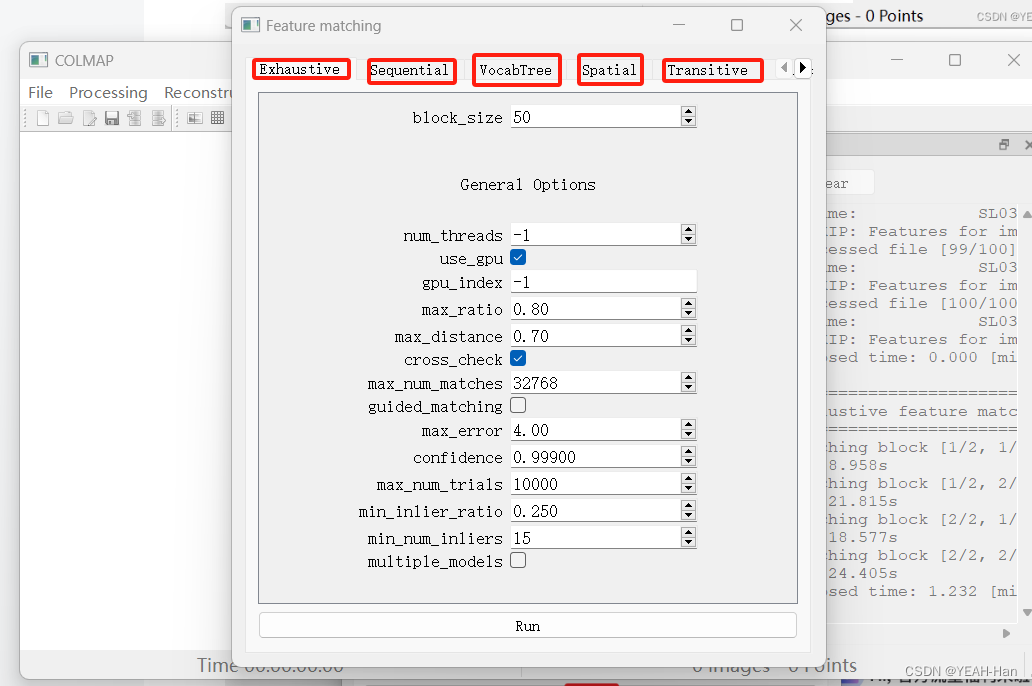
1.Exhaustive——官方文档中说明Exhaustive耗时最长,因为所有图像都会两两匹配,但理论上效果最好。但在实际操作过程中发现很多时候这种方式耗时长而且效果也不好,尤其是当场景很相似时会集中在一团,例如建筑的四个面都很像,这时匹配后会认为只拍到了一个面,其他三面都重建不出来。
2.Sequential——这种方式我使用了挺长时间,因为一般去采集图像时,都是按时序去采集,甚至直接从视频提取帧(ffmpeg很好用!),因此使用这种匹配方式,选择相邻x张图像匹配,往往效果会比较好,像上面的问题就不会遇到。但是它也会有其他的问题,比如在拍摄开始和拍摄结束,都拍摄的同一个物体,但由于误差累计,可能会重建出两个一模一样的(只是会有些偏差)。
3.Spatial——这种方式是利用了地理位置信息,也就是每张图像必须自带位置信息,例如gps。这种方式需要设置在多大范围内进行匹配,因此需要事先知道大概重建场景大小,以便选择合适参数。
4.Custom——这种就是自定义。一开始我觉得这种方式很傻,不智能,所以从没用过。但是在试了前面几种方法,效果还是不理想,怀疑人生的时候,我发现可以自己去定义哪几张图像匹配哪几张不匹配,最后简直有奇效!!!所以这种方式适合很清楚自己的数据是怎么来的,有一定先验后去制定匹配方式。总之这几种方式都各有优劣,按照实际情况选择就行。
5.Hierachical——这好像是只有命令行才有的匹配方式,图形界面还没有加上去。这是针对大场景,图像数量很多时,会自动分成几个部分并行计算,最后拼在一起。然而试了下貌似效果并不是很理想,github上也说会在后续改进,目前只是一个初步的功能。

![[Python人工智能] 四十五.命名实体识别 (6)利用keras构建CNN-BiLSTM-ATT-CRF实体识别模型(注意力问题探讨)](https://img-blog.csdnimg.cn/bf1659094a5b4541a19a93c14fafa5d1.png#pic_center)