1.定时器功能介绍:
在控制领域里面,我们可以用信号输出定时器,进行PWM的控制,从而达到控制电机的目的,通过输入捕获功能可以用来接收外部的数字信号,用于测量脉冲宽度、频率或周期等。在这里给大家介绍下,具体用定时器做计数,输出和捕获的功能实现。
STM32F4一共有三种14个定时器。(12个16位的,2个32位的),STM32F1系列只有8个16位的。
高级定时器:TIM1、TIM8。通常用于特定领域和专业需求用户使用的精密计时工具,通常适用于需要精度更高的领域。通常可以精确到毫秒或更小的时间单位,并具有更复杂的逻辑和算法。
通用定时器:TIM2、TIM5、TIM3、TIM4,TIM9~TIM14。
基本定时器:TIM6、TIM7,没有捕获等通道,用作简单定时。
STM32通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)等。

2.计数定时器配置
在STM32F429上实现TIM6的计时,可以通过以下步骤进行:
-
使能TIM6时钟。
-
初始化TIM6时基单元,设置时钟分频系数和计数周期。
-
使能更新中断(如果需要)。
-
使能TIM6。
-
等待中断处理(如果使能了中断)。
以下是一个简单的示例代码,展示如何使用HAL库函数来配置TIM6作为一个简单的计时器:
/* 注意:1. 中断相关名称。注意基本定时器TIM6 的中断名为 TIM6_DAC_IRQn,< TIM6 global and DAC1&2 underrun error interrupts>,其他一些定时器为 TIMx_IRQn(x=2,3,4,7 etc) */
/* 中断函数名为 TIM6_DAC_IRQHandler(),而不是 TIM6_IRQHandler() */
/* 3. 基本定时器(TIM6, TIM7),通用定时器,高级定时器(TIM1, TIM8),功能越来越多,此处只做个简单计时,基本定时器足够了 */#include "timer.h"uint32_t tim = 0; // 全局变量,每0.1ms加1
TIM_HandleTypeDef TIM6_Handler; //定时器句柄 /* 基本定时器6初始化 */
/* 实现 0.1ms 计时中断 */
/* 90M/90=1M,1M/100 = 10kHz = 0.1ms */
void TIM6_Init(void)
{ TIM_MasterConfigTypeDef sMasterConfig = {0};TIM6_Handler.Instance = TIM6; // 基本定时器TIM6_Handler.Init.Prescaler = 180-1; // 分频系数 180MHz,得到 180M/180=1M 时钟TIM6_Handler.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数器TIM6_Handler.Init.Period = 100-1; // 自动装载值 100,每 100/1M = 100us=0.1ms中断一次htim7.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;HAL_TIM_Base_Init(&TIM6_Handler);sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK){Error_Handler();}HAL_TIM_Base_Start_IT(&TIM6_Handler); //使能定时器3和定时器3更新中断:TIM_IT_UPDATE
}
/* 定时器底册驱动,开启时钟,设置中断优先级 */
/* 此函数会被HAL_TIM_Base_Init()函数调用 */
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM6){__HAL_RCC_TIM6_CLK_DISABLE(); // 使能TIM6时钟,HAL_NVIC_SetPriority(TIM6_IRQn,1,3); // 中断优先级:抢占优先级1,子优先级3。HAL_NVIC_EnableIRQ(TIM6_IRQn); // 开启ITM6中断 }
}/*** @brief 定时器比较中断* @param htim:定时器句柄指针* @note 无* @retval 无*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(__HAL_TIM_GET_IT_SOURCE(&TIM6_Handler, TIM_IT_UPDATE) !=RESET){__HAL_TIM_CLEAR_IT(&TIM6_Handler, TIM_IT_UPDATE); // 清除中断标志位}tim ++; // 又是0.1ms,全局时间计数加1
}
3.TIM3输出4路PWM波
与定时不同,配置输出PWM波需要配置I/O口,相应地需要配置相应通道;输出PWM波时可不配置中断。步骤如下:
初始化配置。选择时钟、配置分频系数、计数模式、自动重装值、分频因子。
通道配置。配置PWM模式、默认占空比、输出比较极性并且开启对应的通道。
底层配置。开启时钟、配置相关引脚。
此处,航模电机驱动频率选择常用的 400Hz,定时器重装值选择 5000-1。为了方便实际中调节各个电机的占空比,编写设置于获取占空比的函数,占空比调节精度为 1/1000。
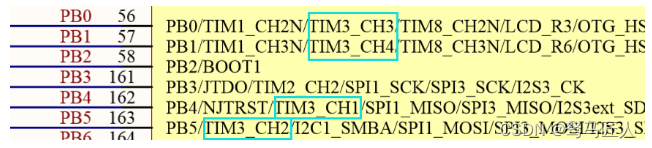
对于I/O选择,使用了TIM3 CH1~CH3,对应引脚参考核心板原理图:
#define PWM_PIN GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_0 | GPIO_PIN_1
#define PWM_GPIO GPIOB
#define PWM_ENCLK() __HAL_RCC_TIM3_CLK_ENABLE(); \__HAL_RCC_GPIOB_CLK_ENABLE(); // 使能定时器3,开启GPIOB时钟 /* 四个电机枚举 */
typedef enum
{MOTOR1 = 0,MOTOR2 = 1,MOTOR3 = 2,MOTOR4 = 3
};/* TIM3 4路 PWM波输出初始化 */
void TIM3_PWM_Init(void)
{ TIM3_Handler.Instance = TIM3; //定时器3TIM3_Handler.Init.Prescaler = 45-1; //定时器分频 45,得到 90M/45=2M 时钟TIM3_Handler.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数模式TIM3_Handler.Init.Period = 5000-1; //自动重装载值 5000,得到PWM频率 2M/5k=400HzTIM3_Handler.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;HAL_TIM_PWM_Init(&TIM3_Handler); //初始化PWMTIM3_CHxHandler.OCMode = TIM_OCMODE_PWM1; //模式选择PWM1TIM3_CHxHandler.Pulse = 0; //设置比较值,此值用来确定占空比,默认为0TIM3_CHxHandler.OCPolarity = TIM_OCPOLARITY_HIGH; //输出比较极性为高HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CHxHandler,TIM_CHANNEL_1); //配置TIM3通道1HAL_TIM_PWM_Start(&TIM3_Handler, TIM_CHANNEL_1); //开启PWM通道1HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CHxHandler,TIM_CHANNEL_2); //配置TIM3通道2HAL_TIM_PWM_Start(&TIM3_Handler, TIM_CHANNEL_2); //开启PWM通道2HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CHxHandler,TIM_CHANNEL_3); //配置TIM3通道3HAL_TIM_PWM_Start(&TIM3_Handler, TIM_CHANNEL_3); //开启PWM通道3HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CHxHandler,TIM_CHANNEL_4); //配置TIM3通道4HAL_TIM_PWM_Start(&TIM3_Handler, TIM_CHANNEL_4); //开启PWM通道4}/* 定时器底层驱动,时钟使能,引脚配置 */
/* 此函数会被HAL_TIM_PWM_Init()调用 */
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{GPIO_InitTypeDef GPIO_Initure;PWM_ENCLK();GPIO_Initure.Pin = PWM_PIN; GPIO_Initure.Mode = GPIO_MODE_AF_PP; // 复用推完输出GPIO_Initure.Pull = GPIO_PULLUP; // 上拉GPIO_Initure.Speed = GPIO_SPEED_HIGH; // 高速GPIO_Initure.Alternate = GPIO_AF2_TIM3; // 引脚复用HAL_GPIO_Init(PWM_GPIO, &GPIO_Initure);
}/* 设置电机占空比 */
/* motor: 选择电机,可填MOTOR1, MOTOR2, MOTOR3, MOTOR4 */
/* duty: 占空比为千分之 duty */
void SetMotorDuty(uint8_t motor, uint16_t duty)
{if (duty > 1000)duty = 1000;else if (duty < 0)duty = 0;if (motor == MOTOR1)TIM3->CCR1 = duty * 5 - 1; // 由于计数器重装值ARR为 5000,精度为千分之一,故此处乘以5,减一是因为从0开始计数else if (motor == MOTOR2)TIM3->CCR2 = duty * 5 - 1;else if (motor == MOTOR3)TIM3->CCR3 = duty * 5 - 1;else if (motor == MOTOR4) TIM3->CCR4 = duty * 5 - 1;
}/* 获取电机占空比 */
/* motor选择电机,可填MOTOR1, MOTOR2, MOTOR3, MOTOR4,占空比为千分之返回值 */
uint16_t GetMotorDuty(uint8_t motor)
{uint32_t cap_value;if (motor == MOTOR1)cap_value = HAL_TIM_ReadCapturedValue(&TIM3_Handler,TIM_CHANNEL_1); // 读取比较寄存器的值else if (motor == MOTOR2)cap_value = HAL_TIM_ReadCapturedValue(&TIM3_Handler,TIM_CHANNEL_1);else if (motor == MOTOR3)cap_value = HAL_TIM_ReadCapturedValue(&TIM3_Handler,TIM_CHANNEL_1);else if (motor == MOTOR4) cap_value = HAL_TIM_ReadCapturedValue(&TIM3_Handler,TIM_CHANNEL_1);return (cap_value+1) / 5;
}
4.TIM5输入捕获
输入捕获也需要配置对应的 I/O 口于通道,而且需要在中断服务函数里实现定时中断、高/低电平时间的测量。步骤如下:
1.初始化配置:选择时钟、配置分配系数、计数模式、自动重装值、时钟分频因子。
2.通道配置:配置上升/下降沿捕获、引脚对应寄存器、分频因子、滤波效果。
3.底层配置:配置引脚、使能时钟、中断优先级与是能。
4.中断服务函数:思想很简单,分别读取下降沿、上升沿、下降沿时寄存器数据,计算得到正脉宽、周期等参数。
#define CAP_PIN GPIO_PIN_0
#define CAP_GPIO GPIOA
#define CAP_ENCLK() __HAL_RCC_TIM5_CLK_ENABLE(); \__HAL_RCC_GPIOA_CLK_ENABLE(); //使能TIM5时钟,开启GPIOA时钟TIM_HandleTypeDef TIM5_Handler; //定时器5句柄uint32_t cap_value1 = 0; // 检测到上升沿时的计数
uint32_t cap_value2 = 0; // 检测到下降沿时的计数, cap_value2 - cap_value1 即为正脉冲时间
uint32_t cap_value3 = 0; // 再次检测到上升沿时的计数, cap_value3 - cap_value1 即为周期uint8_t cap_sta = 0; // 输入捕获状态, 0:没有完成捕获,去捕获边沿吧 1:捕获边沿完成,去计算周期吧
uint8_t cap_times = 0; // 捕获次数/* 定时器5通道1输入捕获配置 */
/* 频率:90M/90/1 = 1MHz */
void TIM5_CH1_Cap_Init(void)
{ TIM_IC_InitTypeDef TIM5_CH1Config; TIM5_Handler.Instance = TIM5; // 通用定时器5TIM5_Handler.Init.Prescaler = 90-1; // 分频系数TIM5_Handler.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数器TIM5_Handler.Init.Period = 0XFFFFFFFF; // 自动装载值TIM5_Handler.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 时钟分频银子HAL_TIM_IC_Init(&TIM5_Handler); // 初始化输入捕获时基参数TIM5_CH1Config.ICPolarity = TIM_ICPOLARITY_RISING; // 上升沿捕获TIM5_CH1Config.ICSelection = TIM_ICSELECTION_DIRECTTI; // 设置引脚与寄存器关系。CH1、CH2用TI1,CH3、CH4用TI2TIM5_CH1Config.ICPrescaler = TIM_ICPSC_DIV1; // 配置输入分频,不分频TIM5_CH1Config.ICFilter=0; // 配置输入滤波器,不滤波HAL_TIM_IC_ConfigChannel(&TIM5_Handler,&TIM5_CH1Config,TIM_CHANNEL_1);//配置TIM5通道1HAL_TIM_IC_Start_IT(&TIM5_Handler,TIM_CHANNEL_1); // 开启TIM5的捕获通道1,并且开启捕获中断__HAL_TIM_ENABLE_IT(&TIM5_Handler,TIM_IT_UPDATE); // 使能更新中断
}/* 定时器5底层驱动,时钟使能,引脚配置 */
/* 此函数会被HAL_TIM_IC_Init()调用 */
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim)
{GPIO_InitTypeDef GPIO_Initure;CAP_ENCLK();GPIO_Initure.Pin = CAP_PIN; // 引脚GPIO_Initure.Mode = GPIO_MODE_AF_PP; // 复用推挽输出GPIO_Initure.Pull = GPIO_PULLDOWN; // 下拉GPIO_Initure.Speed = GPIO_SPEED_HIGH; // 高速GPIO_Initure.Alternate = GPIO_AF2_TIM5; // PA0复用为TIM5通道1HAL_GPIO_Init(CAP_GPIO,&GPIO_Initure);HAL_NVIC_SetPriority(TIM5_IRQn,2,0); // 设置中断优先级,抢占优先级2,子优先级0HAL_NVIC_EnableIRQ(TIM5_IRQn); // 开启ITM5中断通道
}/* 定时器5中断服务函数 */
void TIM5_IRQHandler(void)
{HAL_TIM_IRQHandler(&TIM5_Handler); //定时器共用处理函数
}/* 定时器输入捕获中断处理回调函数,该函数在HAL_TIM_IRQHandler中会被调用 */
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) //更新中断(溢出)发生时执行
{if (cap_sta == 0){switch (cap_times){case 0: // 清空一切,准备捕获cap_value1 = 0;cap_value2 = 0;cap_value3 = 0;__HAL_TIM_DISABLE(&TIM5_Handler); //关闭定时器5__HAL_TIM_SET_COUNTER(&TIM5_Handler,0); TIM_RESET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1); //一定要先清除原来的设置!!TIM_SET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING);//定时器5通道1设置为下降沿捕获__HAL_TIM_ENABLE(&TIM5_Handler);cap_times = 1;break;case 1: // 捕获了一次cap_value1 = HAL_TIM_ReadCapturedValue(&TIM5_Handler,TIM_CHANNEL_1); // 读数一次TIM_RESET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1); //一定要先清除原来的设置!!TIM_SET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING);//定时器5通道1设置为上升沿捕获 cap_times = 2;break;case 2: // 捕获了两次cap_value2 = HAL_TIM_ReadCapturedValue(&TIM5_Handler,TIM_CHANNEL_1); // 读数一次TIM_RESET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1); //一定要先清除原来的设置!!TIM_SET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING);//定时器5通道1设置为下降沿捕获 cap_times = 3;break;case 3: // 捕获了三次cap_value3 = HAL_TIM_ReadCapturedValue(&TIM5_Handler,TIM_CHANNEL_1); // 读数一次TIM_RESET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1); //一定要先清除原来的设置!!TIM_SET_CAPTUREPOLARITY(&TIM5_Handler,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING); //定时器5通道1设置为上升沿捕获cap_times = 0; cap_sta = 1; // 所有捕获完成,可以去计算了break;}}
}
测试捕获和输出:
void TestPwmTask(void *arg)
{const uint16_t test_postime = 100; // 正常时间为 test_postime / 1000 * 2500 = test_postime * 2.5uint32_t pos_time; // 高电平时间uint32_t cycle; // 周期uint32_t freq; // 频率float pos_duty; // 正占空比SetMotorDuty(MOTOR1, test_postime); // 电机PWM 400Hz = 2500 us,占空比 100/1000,高电平时间 250us SetMotorDuty(MOTOR2, test_postime);SetMotorDuty(MOTOR3, test_postime);SetMotorDuty(MOTOR4, test_postime);while(1){if (cap_sta == 1) //成功捕获到了一次高电平{pos_time = cap_value3 - cap_value2;cycle = cap_value3 - cap_value1;freq = (uint32_t)1000000 / cycle;pos_duty = (float) pos_time / (float) cycle;printf("周期:%d us\t 正脉冲宽:%d us \r\n", cycle, pos_time);printf("频率:%d Hz\t 正占空比:%.2f %%\r\n\r\n", freq, pos_duty*100);cap_sta = 0; // 搞完事情,开启下一次捕获}delay_ms(200);}
}