FreeRTOS中断管理以及实验
继续记录学习FreeRTOS的博客,参照正点原子FreeRTOS的视频。
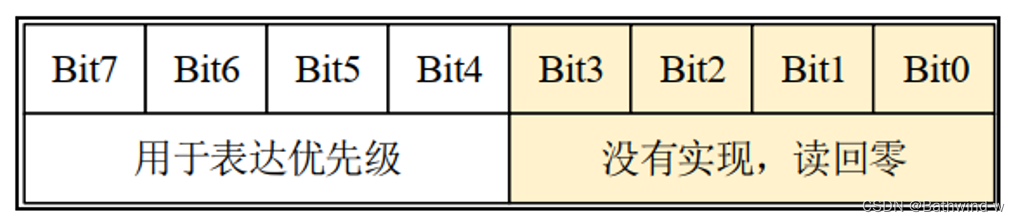
ARM Cortex-M 使用了 8 位宽的寄存器来配置中断的优先等级,这个寄存器就是中断优先级配置寄存器 ,
STM32寄存器中并且这个寄存器只使用[7:4],所以具体表达优先级的位数如下图所示:
STM32的中断优先级可以分为抢占优先级和子优先级。
1:抢占优先级:抢占优先级高的中断可以打断正在执行但抢先优先级低的中断。
2:子优先级:当同时发生具有相同抢占优先级的两个中断时候,子优先级小的优先执行,但是抢占优先级相同的时候,子优先级之间不能发生打断。只能一个执行完继续执行下一个。

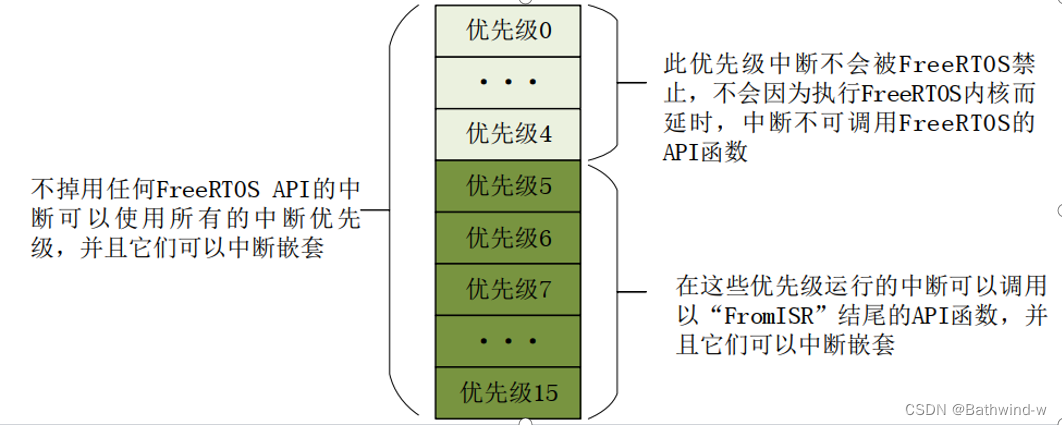
STM32中中断分组分为5个优先级分组,而FreeRTOS中了为了方便管理,采用中断分组4,也就是全部4bit用于抢占优先级,而抢占优先级的范围也就是0-15。然后FreeRTOS管理的中断级别从5-15。
接下来要了解中断相关的寄存器以及在FreeRTOS如何配置寄存器。中断相关的寄存器为SHPR1、SHPR2、SHPR3。
并且这三个寄存器的地址分别为:0xE000ED18、0xE000ED1C、0xE000ED20。具体每个地址对应的中断设置优先级可以从手册区看到:

接下来要讲PendSV和SysTick设置为最低的优先级15如何设置。
/* Make PendSV and SysTick the lowest priority interrupts. */portNVIC_SHPR3_REG |= portNVIC_PENDSV_PRI;portNVIC_SHPR3_REG |= portNVIC_SYSTICK_PRI;/* Constants required to manipulate the core. Registers first... */#define portNVIC_SYSTICK_CTRL_REG ( *( ( volatile uint32_t * ) 0xe000e010 ) )#define portNVIC_SYSTICK_LOAD_REG ( *( ( volatile uint32_t * ) 0xe000e014 ) )#define portNVIC_SYSTICK_CURRENT_VALUE_REG ( *( ( volatile uint32_t * ) 0xe000e018 ) )#define portNVIC_SHPR3_REG ( *( ( volatile uint32_t * ) 0xe000ed20 ) )#define portNVIC_PENDSV_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 16UL )#define portNVIC_SYSTICK_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 24UL )#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 //中断最低优先级#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 //系统可管理的最高中断优先级#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )#ifdef __NVIC_PRIO_BITS#define configPRIO_BITS __NVIC_PRIO_BITS
#else#define configPRIO_BITS 4
#endif接下来让我们来理解上面的这部分代码。通用的步骤为:
1:计算新值:首先,你计算一个值,该值在你想要修改的位上有所改变,在其他位上为0。这通常通过将一个数值左移到正确的位置来完成。
2:应用新值:然后,你使用“或等于”(|=)操作符,将这个值“或”到寄存器的当前值上。在我们的例子中,这意味着如果portNVIC_PENDSV_PRI中设定的位在portNVIC_SHPR3_REG中已经是1,它们会保持为1;如果是0,则根据portNVIC_PENDSV_PRI中的相应位被设置为1或保持为0。
这里假如我们要设置PendSV的优先级为15,我们首先要计算在想改变的位置的值是多少。这里要把优先级设置为15,并且中断分组为4,且只用高四位。所以将15左移4位。这里定义了PendSV和SysTick中断的优先级。这些优先级是通过将configKERNEL_INTERRUPT_PRIORITY左移16位或24位来设置的。这样做是因为在portNVIC_SHPR3_REG寄存器中,PendSV和SysTick的优先级字段位于不同的位置。
所以关于PendSV和SysTick中断优先级的配置完成。
三个中断屏蔽寄存器,分别为 PRIMASK、 FAULTMASK 和BASEPRI 。
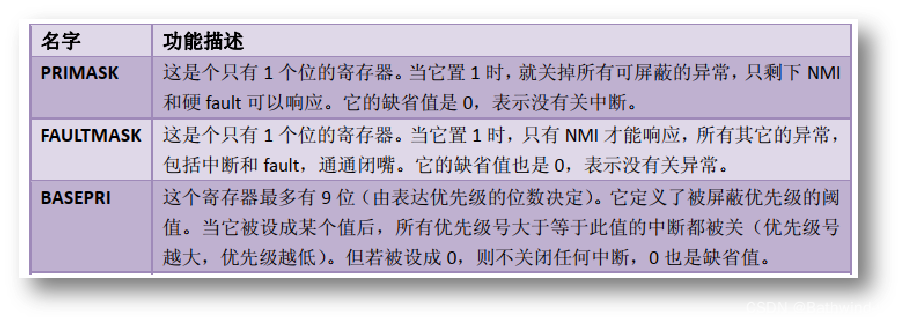
FreeRTOS使用的中断屏蔽寄存器为:BASEPRI
关闭程序具体如下:
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
static portFORCE_INLINE void vPortRaiseBASEPRI( void )
{ uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY; __asm {msr basepri, ulNewBASEPRI dsb isb}
}
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 /* FreeRTOS可管理的最高中断优先级 */
当BASEPRI设置为0x50时:
在中断服务函数中调度FreeRTOS的API函数需注意:
1、中断服务函数的优先级需在FreeRTOS所管理的范围内
2、在中断服务函数里边需调用FreeRTOS的API函数,必须使用带“FromISR”后缀的函数
开中断程序为:
#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )
static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
{ __asm{msr basepri, ulBASEPRI}
}
下面通过编写程序来使用FreeRTOS中断管理:
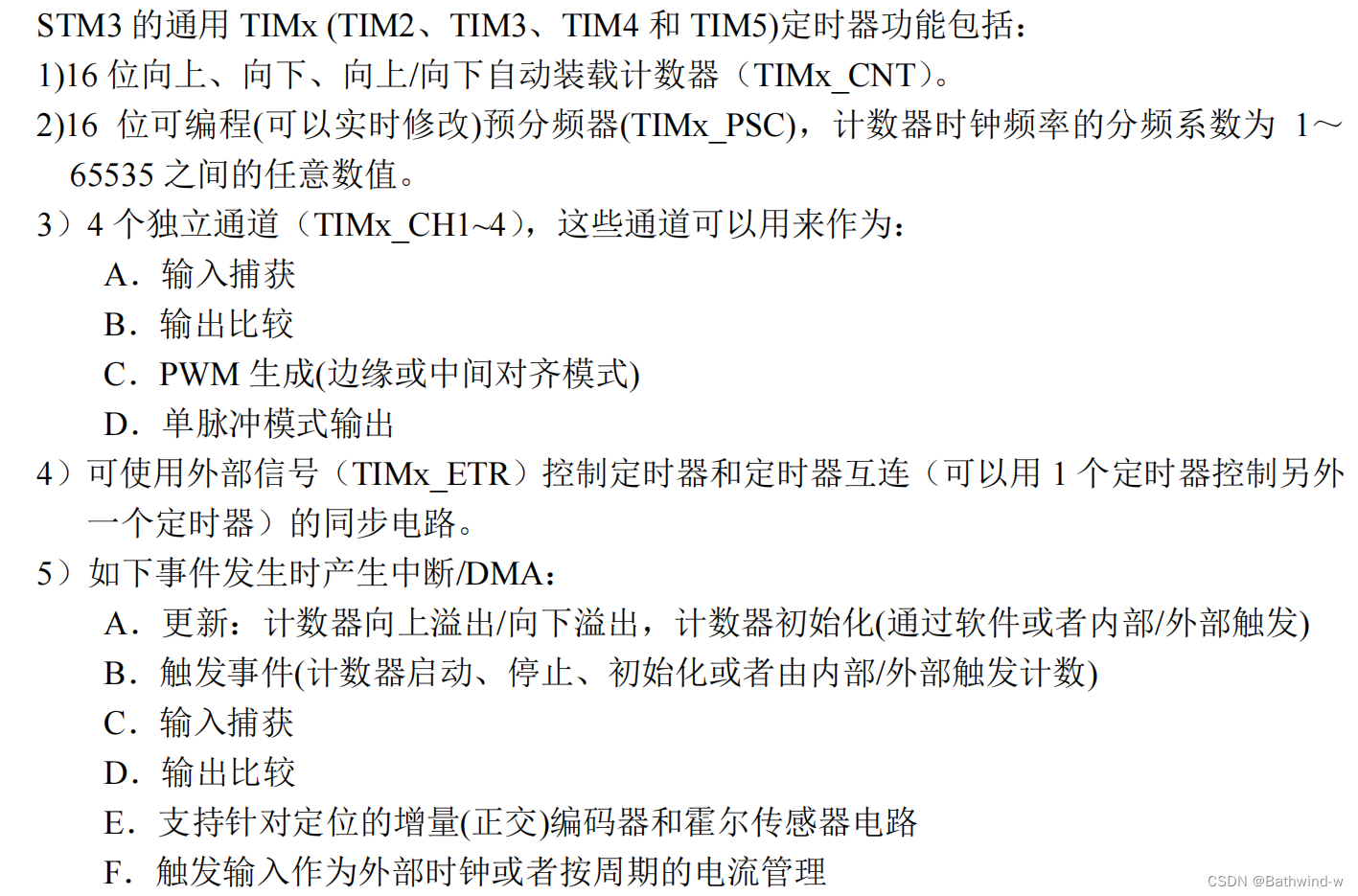
接下来我们添加定时器中断相关的.c文件。这里顺便复习下STM32的定时器中断。参照正点原子HAL库开发手册。
STM32 的通用定时器是一个通过可编程预分频器(PSC)驱动的 16 位自动装载计数器(CNT)构成。STM32 的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和 PWM)等。 使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。STM32 的每个通用定时器都是完全独立的,没有互相共享的任何资源。
控制寄存器 1(TIMx_CR1):
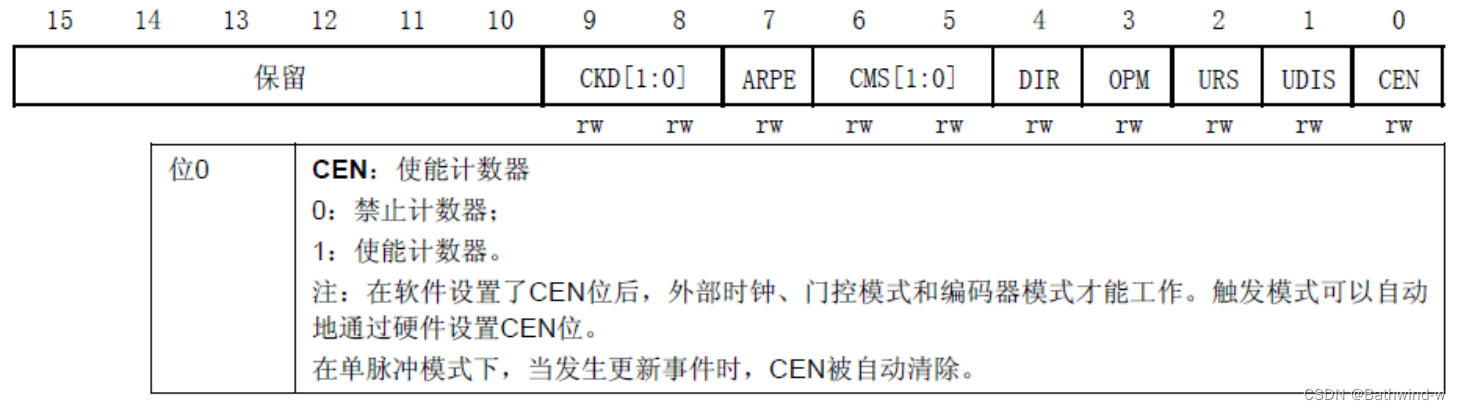
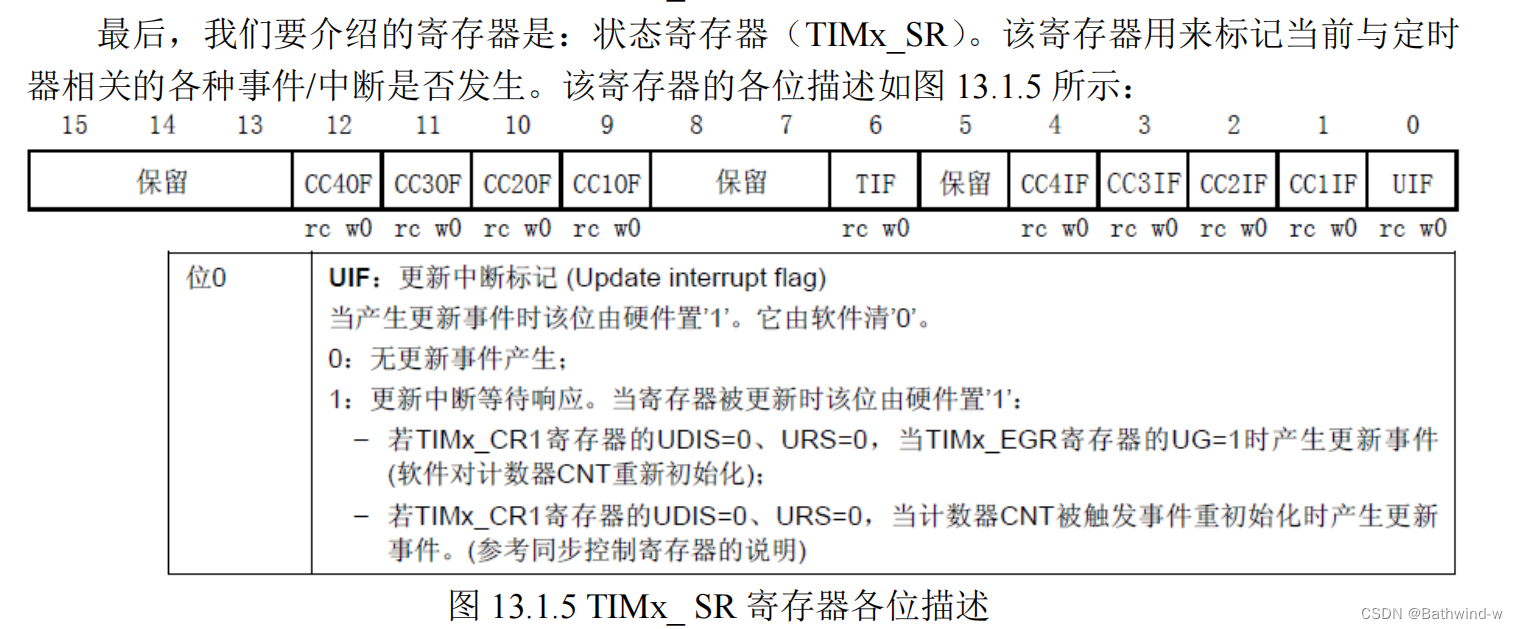
这里只用到了最低位。接下来介绍第二个与我们这章密切相关的寄存器:DMA/中断使能寄存器(TIMx_DIER)。该寄存器是一个 16 位的寄存器。

同时这个寄存器的第0位我们要设置为允许更新中断。也就是设置为1.
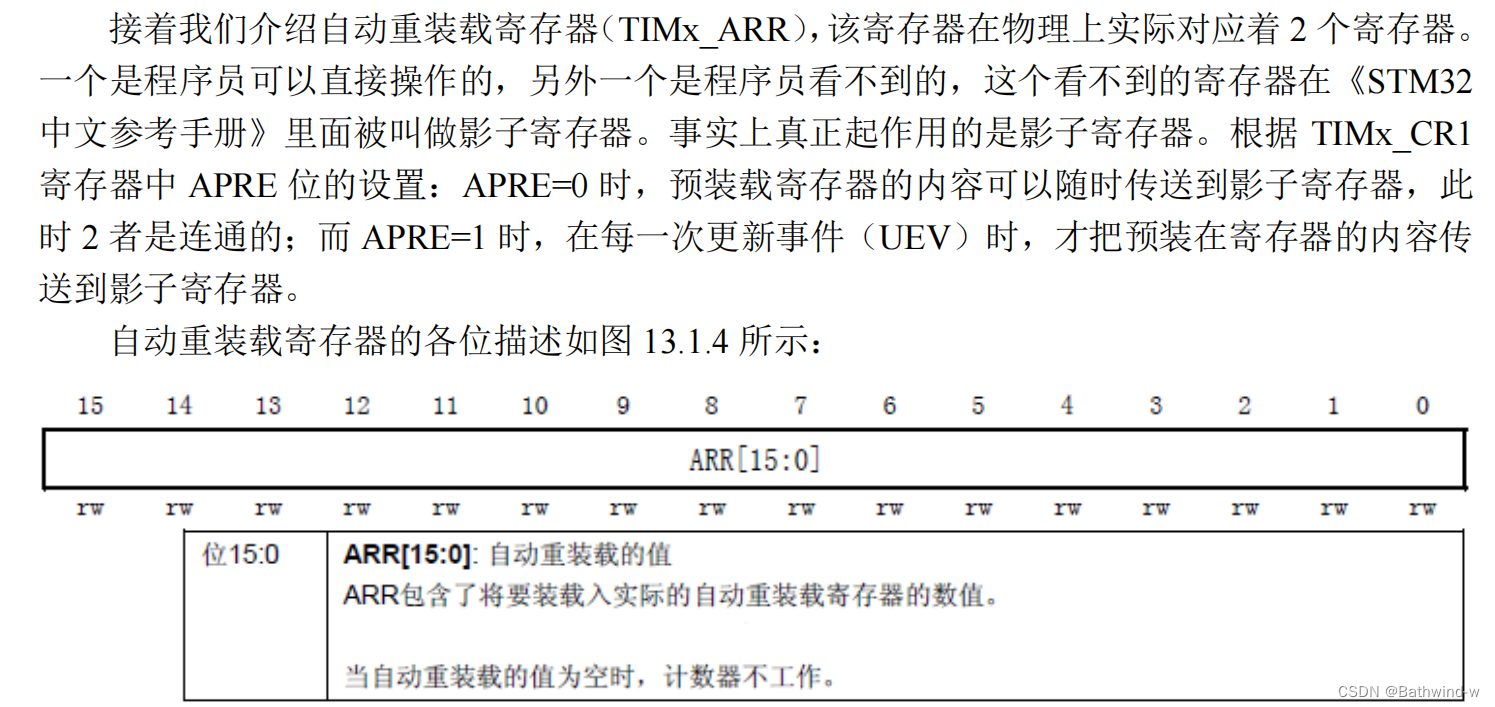
预分频寄存器(TIMx_PSC)。该寄存器用设置对时钟进行分频,然后提供给计数器,作为计数器的时钟。该寄存器的各位描述如图所示:

然后定时器的来源有以下四种:

接下来我们来编写程序。由于题目要求俩个定时器,所以我们要再初始化一个定时器。这里初始化定时器4.
TIM_HandleTypeDef TIM3_Handler; //定时器句柄
TIM_HandleTypeDef TIM4_Handler; //定时器句柄
//通用定时器3中断初始化
//arr:自动重装值。
//psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//这里使用的是定时器3!
void TIM3_Init(u16 arr,u16 psc)
{ TIM3_Handler.Instance=TIM3; //通用定时器3TIM3_Handler.Init.Prescaler=psc; //分频系数TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP; //向上计数器TIM3_Handler.Init.Period=arr; //自动装载值TIM3_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//时钟分频因子HAL_TIM_Base_Init(&TIM3_Handler);HAL_TIM_Base_Start_IT(&TIM3_Handler); //使能定时器3和定时器3更新中断:TIM_IT_UPDATE
}void TIM4_Init(u16 arr,u16 psc)
{ TIM3_Handler.Instance=TIM4; //通用定时器4TIM3_Handler.Init.Prescaler=psc; //分频系数TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP; //向上计数器TIM3_Handler.Init.Period=arr; //自动装载值TIM3_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//时钟分频因子HAL_TIM_Base_Init(&TIM4_Handler);HAL_TIM_Base_Start_IT(&TIM4_Handler); //使能定时器4和定时器4更新中断:TIM_IT_UPDATE
}//定时器底册驱动,开启时钟,设置中断优先级
//此函数会被HAL_TIM_Base_Init()函数调用
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM3){__HAL_RCC_TIM3_CLK_ENABLE(); //使能TIM3时钟HAL_NVIC_SetPriority(TIM3_IRQn,4,0); //设置中断优先级,抢占优先级1,子优先级0HAL_NVIC_EnableIRQ(TIM3_IRQn); //开启TIM3中断 }if(htim->Instance==TIM4){__HAL_RCC_TIM4_CLK_ENABLE(); //使能TIM4时钟HAL_NVIC_SetPriority(TIM4_IRQn,6,0); //设置中断优先级,抢占优先级1,子优先级0HAL_NVIC_EnableIRQ(TIM4_IRQn); //开启TIM4中断 }
}
//定时器3中断服务函数
void TIM3_IRQHandler(void)
{HAL_TIM_IRQHandler(&TIM3_Handler);
}
//定时器4中断服务函数
void TIM4_IRQHandler(void)
{HAL_TIM_IRQHandler(&TIM4_Handler);
}//回调函数,定时器中断服务函数调用
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim==(&TIM3_Handler)){printf("TIM3优先级为4的正在运行!!!\r\n");}else if (htim==(&TIM4_Handler)){printf("TIM4优先级为6的正在运行!!!\r\n");}
}
主程序创建两个任务即可。