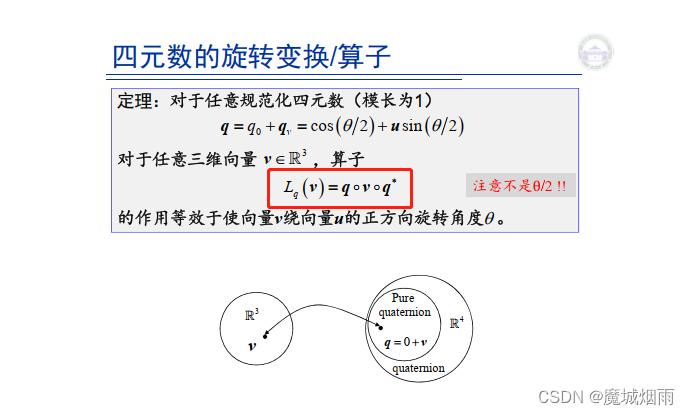
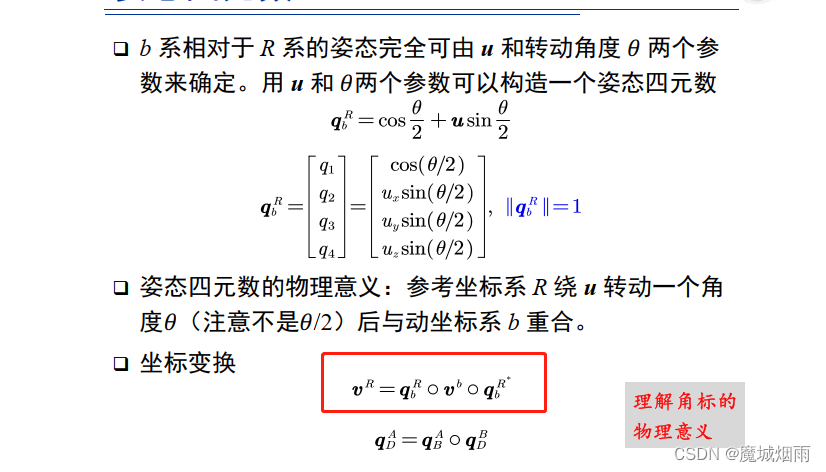
ardupilot 三维向量如何进行旋转

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/60766.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
HECI-Securtiy 防火墙路由技术
目录
一、防火墙路由基本原理
1.路由分类
2.路由优先级
3.路由查询先后顺序
4.静态路由基本原理
(1)指定出接口场景
(2)指定下一跳地址场景
5.静态路由与多出口
(1)主备备份
(2&#…
快速入门:【c# 之 Winform开发】
C#基础
面向对象(OOP) c语言是面向过程。 c是面向过程面向对象。 c#是纯粹的面向对象: 核心思想是以人的思维习惯来分析和解决问题。万物皆对象。 面向对象开发步骤: 分析对象 特征行为关系(对象关系/类关系) 写代码: 特征–>成员变量 方法–>成员方法 实例化–具体对…
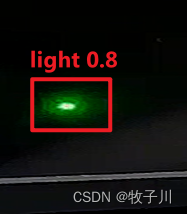
2023 电赛 E 题 激光笔识别有误--使用K210/Openmv/树莓派/Jetson nano实现激光笔在黑色区域的目标检测
1. 引言
1.1 激光笔在黑色区域目标检测的背景介绍
在许多应用领域,如机器人导航、智能家居和自动驾驶等,目标检测技术的需求日益增加。本博客将聚焦于使用K210芯片实现激光笔在黑色区域的目标检测。
激光笔在黑色区域目标检测是一个有趣且具有挑战性的…

同步代码块使用错误示范 | 用了synchronized还是出现“超取”问题
记录一下错误,吸取经验🤔😋
出问题的代码
public class Test {public static void main(String[] args) {new Thread(new Account()).start(); //!!new Thread(new Account()).start(); //!!}…
在工作中使用ChatGPT需要担心泄密问题吗?
OpenAI的ChatGPT可以通过自动简化繁琐的任务,针对挑战性问题的提供创造性的解决方案来提高员工的生产力。但随着这项技术被整合到人力资源平台和其他工作场所中,它给各个企业带来了巨大的挑战。苹果、Spotify、Verizon和三星等大公司已禁止或限制员工在…
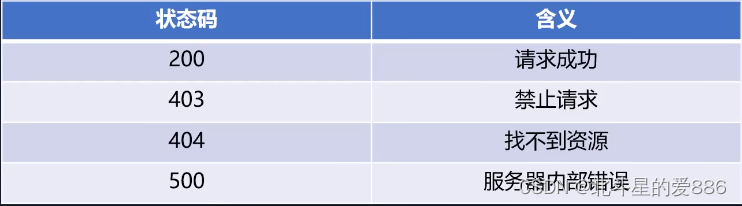
Node.js-http模块服务端请求与响应操作,请求报文与响应报文
简单案例创建HTTP服务端:
// 导入 http 模块
const http require("http");
// 创建服务对象
const server http.createServer((request, response) > {// 设置编码格式,解决中文乱码问题response.setHeader("content-type", &…
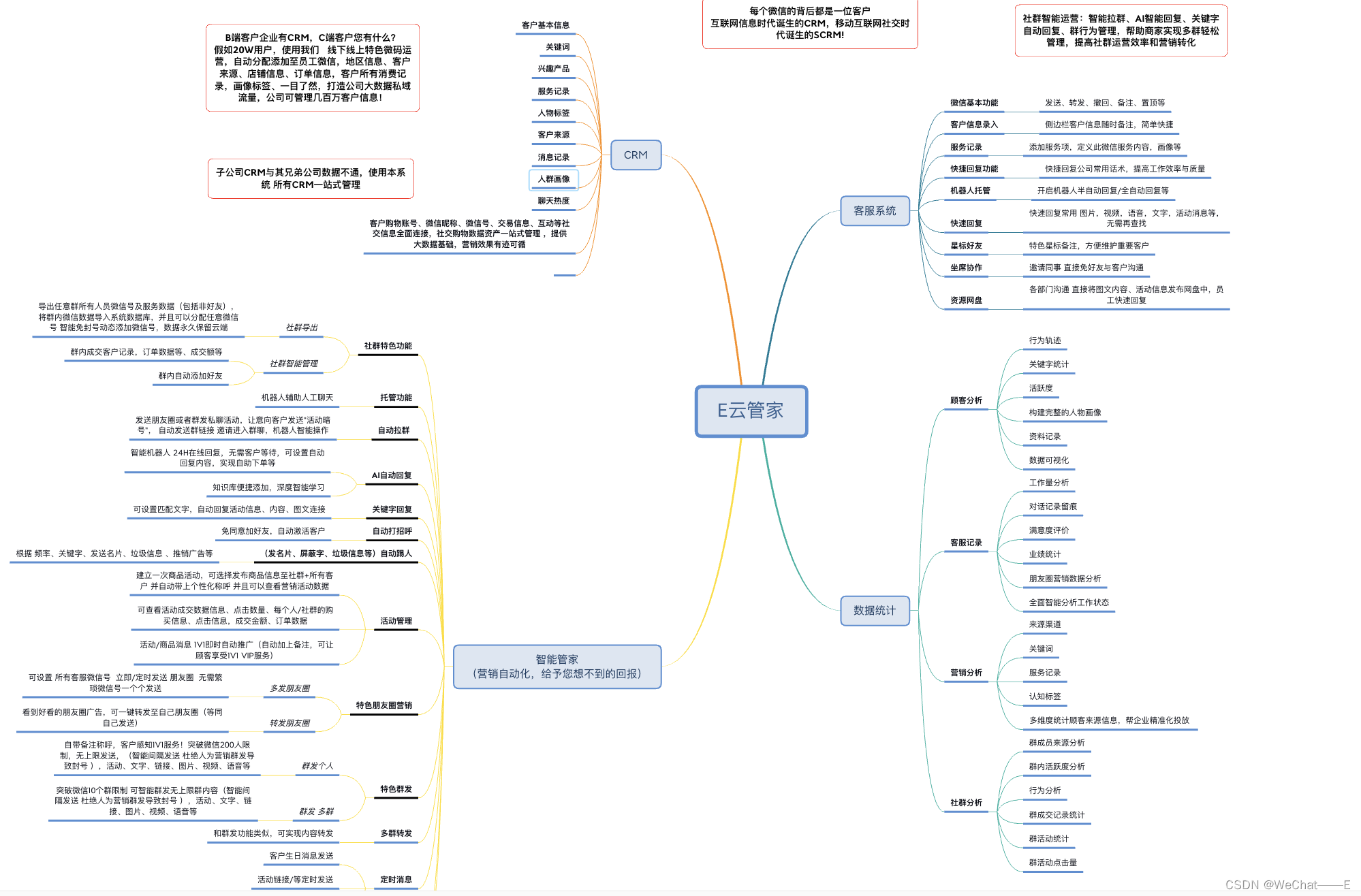
微信开发之一键修改好友标签的技术实现
移除标签下的好友: 把需移除的好友所有标签查出来(通讯录详情接口返回标签id,数据库需缓存),去掉想移出的标签id,labelIdList参数放进其他所有标签id。
增加标签新好友: 把需添加的好友所有标签…

C#实现三菱FX-3U SerialOverTcp
设备信息 测试结果
D值测试 Y值写入后读取测试 协议解析
三菱FX 3U系列PLC的通信协议
1. 每次给PLC发送指令后,必须等待PLC的应答完成才能发送下一条指令; 2. 报文都是十六进制ASCII码的形式 3. 相关指令
指令 命令码(ASCII码) 操作原件 …
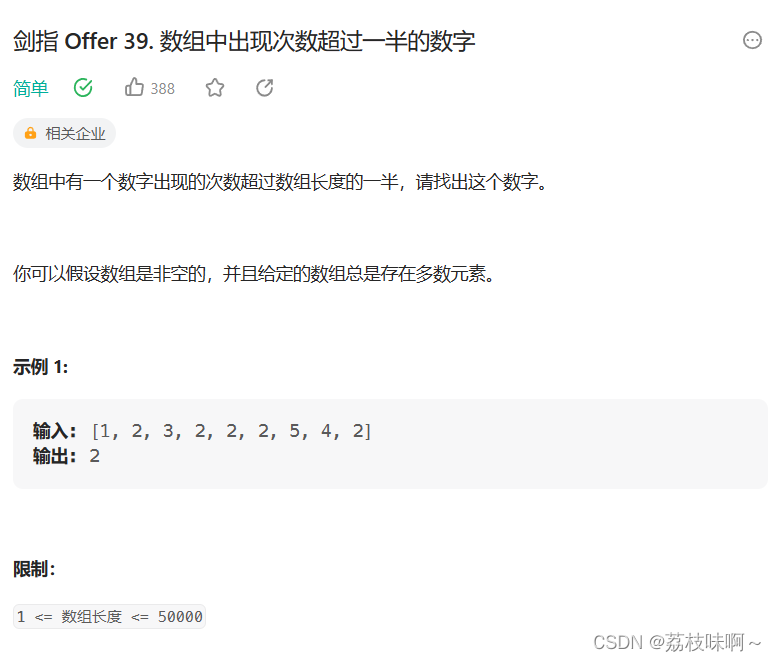
剑指offer39.数组中出现次数超过一半的数字
这个题非常简单,解法有很多种,我用的是HashMap记录每个元素出现的次数,只要次数大于数组长度的一半就返回。下面是我的代码:
class Solution {public int majorityElement(int[] nums) {int len nums.length/2;HashMap<Integ…
【Github】Uptime Kuma:自托管监控工具的完美选择
简介:
Uptime Kuma 是一款强大的自托管监控工具,通过简单的部署和配置,可以帮助你监控服务器、VPS 和其他网络服务的在线状态。相比于其他类似工具,Uptime Kuma 提供更多的灵活性和自由度。本文将介绍 Uptime Kuma 的功能、如何使…
图解java.util.concurrent并发包源码系列——深入理解AQS,看完可以吊打面试官
图解java.util.concurrent并发包源码系列——深入理解AQS,看完可以吊打面试官 AQS是什么?有什么作用?AQS的原理自定义资源资源的获取与释放线程阻塞等待唤醒 AQS源码核心成员变量Node 的内部结构waitStatusprev、next、threadnextWaiterprede…