队列是一种特殊类型的线性表,其只允许在一端进行插入操作,而在另一端进行删除操作。具体来说,允许插入的一端称为队尾,而允许删除的一端称为队头。这种数据结构遵循“先进先出”(FIFO)的原则,即最早进入队列的元素将是最先被删除的元素。
队列的实现方式有多种,包括但不限于:
- 链表队列:链式队列内部使用带头结点的单向链表来实现。链表的首结点表示队列的队头,链表的尾结点代表队尾。当队列为空时,队尾元素指针指向头结点。这种实现方式的好处是灵活,队列容量理论上是不受限制的。
- 循环队列:循环队列使用顺序结构(如数组)来实现。为了充分利用数组空间并避免“假满”情况,循环队列在逻辑上将数组视为一个环形结构。通过维护front(队头指针)和rear(队尾指针)两个变量,可以判断队列是否为空或已满,并进行相应的插入和删除操作。
此外,队列还有一些特殊的分类,如双端队列,它允许在两端都进行元素的删除和追加操作。
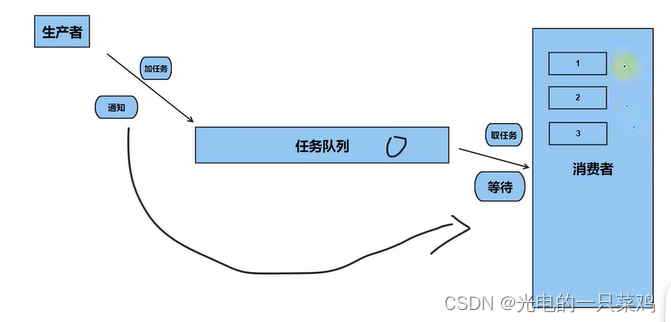
在编程中,队列的应用非常广泛,如处理打印任务、消息传递、线程池管理等场景。队列的使用可以有效地控制数据处理的顺序,提高程序的性能和稳定性。
总的来说,队列是一种非常重要的数据结构,掌握其基本概念、实现方式以及应用场景对于提高编程能力和解决实际问题具有重要意义。
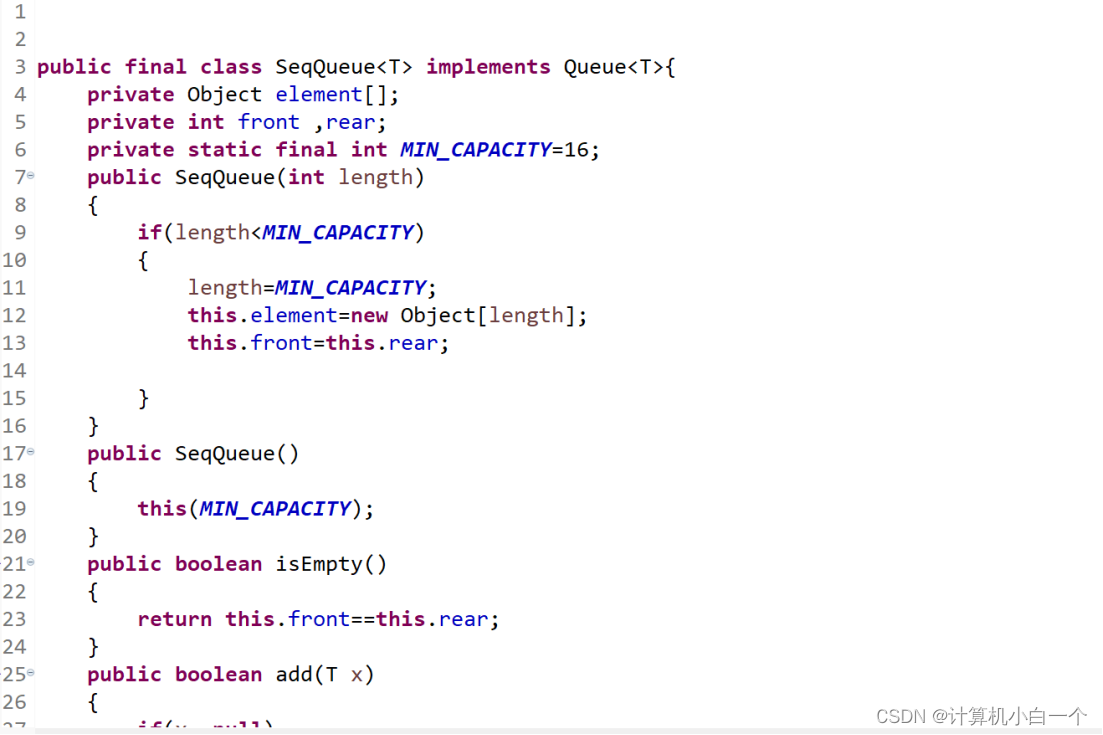
顺序循环队列是一种特殊的队列实现方式,它结合了顺序队列和循环队列的特点。下面我将详细为你讲解顺序循环队列。
首先,我们来回顾一下顺序队列和循环队列的基本概念。顺序队列是用一片连续的存储空间(如数组)来存储队列中的数据元素。而循环队列则是将这片连续的存储空间想象成一个首尾相接的圆环,从而充分利用空间并避免“假上溢”现象。
顺序循环队列则结合了这两者的优势。它使用数组来存储队列中的元素,并通过维护两个指针(通常是front和rear)来跟踪队列的头部和尾部。这两个指针在数组中的位置是循环的,即当它们到达数组的末尾时,会回到数组的开头。
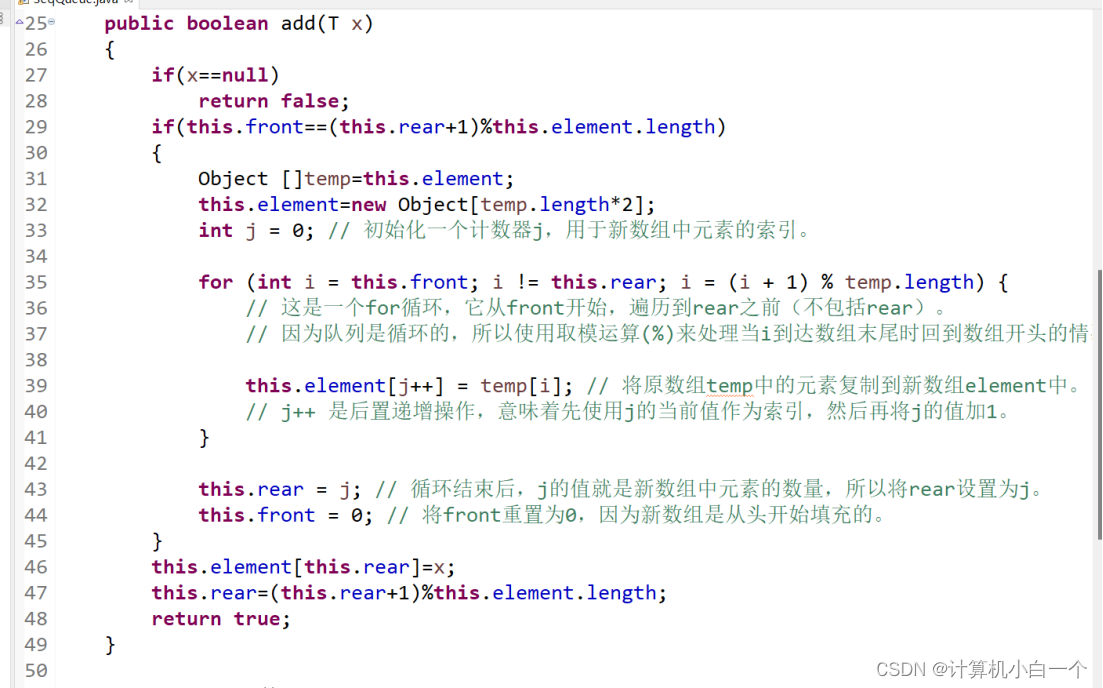
在顺序循环队列中,入队操作(即在队列尾部添加元素)和出队操作(即从队列头部移除元素)都涉及指针的移动。具体来说:
- 入队操作:将新元素插入到rear指针所指向的位置,并将rear指针向前移动一位。如果rear指针已经指向数组的最后一个位置,那么在下一次入队时,rear指针会回到数组的第一个位置。
- 出队操作:删除front指针所指向的元素,并将front指针向前移动一位。同样地,如果front指针已经指向数组的最后一个位置,那么在下一次出队时,front指针会回到数组的第一个位置。顺序循环队列的关键在于如何正确处理指针的移动和循环。通常,我们会使用取模运算(%)来实现这种循环效果。例如,假设数组的大小为QueueSize,那么当rear或front指针需要向前移动时,我们可以使用以下公式来更新它们的值:
- rear = (rear + 1) % QueueSize
- front = (front + 1) % QueueSize
这样,无论rear或front指针当前指向哪个位置,它们都会按照循环的方式在数组中移动。
顺序循环队列的优点在于它能够充分利用数组空间,避免了传统顺序队列在删除元素时可能需要的大量数据移动。同时,由于指针的循环特性,顺序循环队列在判断队列是否为空或满时也需要特殊处理。通常,我们会使用一个额外的变量(如size)来记录队列中当前元素的个数,以便准确判断队列的状态。
总的来说,顺序循环队列是一种高效且实用的队列实现方式,它结合了顺序队列和循环队列的优点,并克服了它们的一些缺点。在实际编程中,我们可以根据具体需求选择使用顺序循环队列来管理数据的顺序和访问。
没关系,我来详细解释一下这两个公式。
在顺序循环队列中,我们使用数组来存储队列的元素,并且通过两个指针 rear 和 front 来追踪队列的队尾和队头。由于我们想要实现循环的效果,即当指针到达数组的末尾时能够自动回到数组的开头,所以我们需要用到取模运算 %。
rear = (rear + 1) % QueueSize
这个公式用于更新 rear 指针,即队尾指针。当我们向队列中添加一个新元素时,rear 指针需要向前移动一位以指向新的空位置。但是,由于数组是有限的,我们不能让 rear 指针超出数组的范围。因此,我们使用取模运算来确保 rear 指针始终在数组的合法范围内。
假设 QueueSize 是数组的大小,那么 rear 的取值范围应该是从 0 到 QueueSize - 1。当 rear 等于 QueueSize - 1 时,再向前移动一位就会超出数组范围。但是,由于我们使用了取模运算,(QueueSize - 1 + 1) % QueueSize 的结果会是 0,这样 rear 指针就回到了数组的开头。
front = (front + 1) % QueueSize
这个公式与上面的类似,但是用于更新 front 指针,即队头指针。当我们从队列中移除一个元素时,front 指针需要向前移动一位以指向下一个要处理的元素。同样地,我们使用取模运算来确保 front 指针始终在数组的合法范围内。
与 rear 的情况类似,当 front 等于 QueueSize - 1 时,再向前移动一位也应该回到数组的开头。因此,(front + 1) % QueueSize 会确保 front 指针的正确循环。
示例
假设 QueueSize 为 5,即我们的数组有 5 个位置,编号从 0 到 4。
- 初始状态:rear = front = 0(队列为空)
- 入队一个元素:rear = (0 + 1) % 5 = 1(rear 指针向前移动一位)
- 再入队一个元素:rear = (1 + 1) % 5 = 2(继续向前移动)
- ... 以此类推,直到 rear = 4
- 当 rear 再次入队一个元素时:rear = (4 + 1) % 5 = 0(回到数组的开头)
同样地,对于 front 指针也是这样的循环过程。
通过这种方式,我们可以实现一个高效的循环队列,充分利用数组空间,并且避免了传统队列在数据移动上的开销。同时,我们还需要注意队列为空和队列满的条件判断,这通常涉及到比较 front 和 rear 的值以及记录队列中当前元素的个数。
队列空和队列满的条件并不一样。在循环队列中,队列空的条件通常是队头指针front和队尾指针rear相等,即front == rear。这意味着队列中没有元素。而队列满的条件则取决于循环队列的实现方式。
一种常见的实现方式是使用“留一个空间”的策略,即当(rear + 1) % QueueSize == front时,队列为满。这里的QueueSize是循环队列的最大长度。这种策略的目的是为了区分队列空和队列满的情况,因为当队列为空时,front和rear也相等。通过留一个空间不使用,当指针再次相遇时,我们可以确定是队列满而不是队列空。
另一种实现方式是通过增设表示队列元素个数的数据成员size。在这种情况下,队列空的条件是size == 0,而队列满的条件是size == QueueSize。这种方式直接通过记录元素个数来判断队列的状态,更为直观。
还有一种方法是通过增设一个tag数据成员来区分队列满和队列空。当tag为0时,若因删除操作导致front == rear,则队列为空;当tag为1时,若因插入操作导致front == rear,则队列为满。
因此,根据循环队列的不同实现方式,队列空和队列满的条件判断方法会有所不同。但总的来说,它们都是基于队头指针和队尾指针的位置关系以及队列中元素的个数来判断的。