一、坐标系
1、二维笛卡尔坐标系
屏幕坐标系是二维笛卡尔坐标系,OpenGL的屏幕坐标系原点在左下角,DirectX的屏幕坐标系原点在左上角。
2、三维笛卡尔坐标系
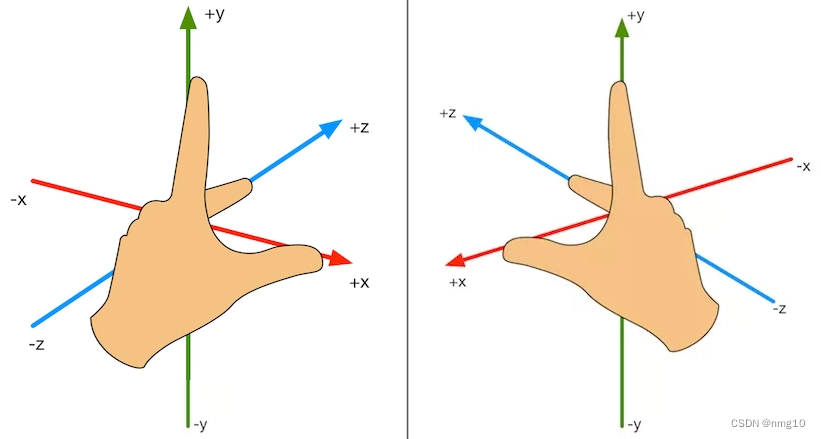
三维笛卡尔坐标系要区分是左手坐标系还是右手坐标系。
左手坐标系:举起你的左手,用食指和大拇指摆出一个“L”的手势,并且让你的食指指向上,大拇指指向右,现在伸出你的中指指向前方。大拇指指向就是x的正向,食指指向就是y的正向,中指指向就是z的正向。
右手坐标系:同上,改为右手操作。
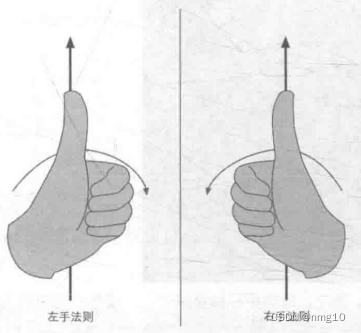
左手坐标系和右手坐标系对于正向旋转的定义也不同。
左手法则和右手法则
左手法则:伸出左手,大拇指指向旋转轴的正向,四指弯曲的方向就是旋转的正向。
右手法则:伸出右手,大拇指指向旋转轴的正向,四指弯曲的方向就是旋转的正向。
Unity的模型空间和世界空间使用的是左手坐标系。
Unity的观察空间(摄像机的坐标系)使用的是右手坐标系。
二、点和矢量
1、概念
点是n维空间中是一个位置,它没有大小概念。
矢量是包含大小和方向的有向线段。
标量用小写字母表示。
矢量用小写的粗体字母表示。
2、矢量运算
2.1 矢量和标量的乘除法
2.2 矢量的加减法
2.3 矢量的模
2.4 单位矢量
是非零矢量
2.5 矢量的点积
公式一:
公式二:
几何意义:是a向量在b向量上的投影的乘积,也可表示两个向量之间的夹角。
2.6 矢量的叉积
结果还是一个矢量,方向是使用对应坐标系的法则来确定。
结果是向量a、b构建的一个平行四边形的面积。
3、练习题
3.1 假设,场景中有一个NPC,它位于点A处,它的前方可以用矢量来表示。
问题1:如果现在玩家运动到了点B处,那么如何判断玩家是在NPC的前方还是后方。
答:用点积来判断,结果大于0就在前方。
问题2:现在NPC只能观察到有限的视角范围且视距为s,也就是说NPC最多只能看到它前方左侧或右侧
角度内且相距在s范围内的物体。那么,我们如何通过点积来判断NPC是否可以看到点B呢?
答:首先求出AB的长度,如果大于s,则必定在视野外。如果小于等于s,则求
,根据
求得,然后判断
的大小关系,如果小于则在视野外,否则就在视野内。
3.2 在渲染中我们常会需要判断一个三角形片是正面还是背面,这可以通过判断三角形的3个顶点在当前空间中是顺时针还是逆时针排列来得到。
问题:已知三个点A、B、C,如何利用叉乘来判断。A、B、C都位于xy平面,人眼位于z轴的负方向上,向z轴正方向观察。
答:

a如果大于0,则是逆时针,看到的是三角形的反面。
a如果小于0,则是顺时针,看到的是三角形的正面。
三、矩阵
1、定义
它是由个标量组成的长方形数组。形如:
表明了这个元素在矩阵M的第i行、第j列。
2、矩阵运算
2.1 矩阵和标量的乘法
2.2 矩阵和矩阵的乘法
一个的矩阵A和一个
的矩阵B相乘,它们的结果AB将会是一个
大小的矩阵。
第一个矩阵的列数必须和第二行矩阵的行数相同,相乘得到的矩阵的行数是第一个矩阵的行数,而列数是第二个矩阵的列数。
相乘得到的矩阵C中的每个元素 等于A的第i行所对应的矢量和B的第j列所对应的矢量进行矢量点乘的结果。即
性质:矩阵乘法不满足交换律,满足结合律
3、特殊矩阵
3.1 方块矩阵
方块矩阵简称方阵,是指那些行和列数目相等的矩阵。
对角元素:指的是行号和列号相等的元素,如、
、
等。
对角矩阵:指的是一个方阵除了对角元素外的所有元素都为0的矩阵。
3.2 单位矩阵
一个特殊的对角矩阵,它的对角元素全为1,用来表示。如下:
任何矩阵和它相乘的结果还是原来的矩阵。MI=IM=M
这就跟标量中的数字1一样。
3.3 转置矩阵
转置矩阵实际是对原矩阵的一种运算。给定一个的矩阵M,它的转置可以表示成
,这是一个
的矩阵。
转置矩阵的计算就是将原矩阵翻转一下即可。原矩阵的第i行变成了第i列,而第j列变成了第j行。公式如下:
性质一:矩阵转置的转置等于原矩阵。
性质二:矩阵串接的转置,等于反向串接各个矩阵的转置。
3.4 逆矩阵
不是所有的矩阵都有逆矩阵,第一个前提就是,该矩阵必须是一个方阵。
给定一个方阵M,它的逆矩阵用来表示。逆矩阵的重要性质就是,原矩阵与逆矩阵相乘结果是一个单位矩阵。
性质一:逆矩阵的逆矩阵是原矩阵。
性质二:单位矩阵的逆矩阵是它本身。
性质三:转置矩阵的逆矩阵是逆矩阵的转置。
性质四:矩阵串接相乘后的逆矩阵等于反向串接各个矩阵的逆矩阵。
逆矩阵的几何意义:当我们使用变换矩阵对矢量
进行了一次变换,然后再使用它的逆矩阵
进行另一次变换,那么会得到原来的矢量。
逆矩阵的计算:
方法一:伴随矩阵法
- 求伴随矩阵:对于n阶矩阵A,其伴随矩阵
的元素
是
,其中
是去掉A中第j行第i列后得到的n-1阶子矩阵。
- 求行列式:计算矩阵A的行列式∣A∣。
- 计算逆矩阵:
。
方法二:初等变换法
- 构造增广矩阵:将原矩阵A与单位矩阵I放在一起,形成增广矩阵[A∣I]。
- 进行初等行变换:对增广矩阵[A∣I]进行初等行变换,目标是使左边的矩阵变为单位矩阵E。
- 提取逆矩阵:经过初等行变换后,增广矩阵变为[E∣B],此时B即为A的逆矩阵
。
下面是一个简单的例子来说明如何使用初等变换法求逆矩阵:
假设矩阵
,我们需要求其逆矩阵。
- 构造增广矩阵:
。
- 进行初等行变换:
- 第一行乘以-3加到第二行:
。
- 第二行除以-2:
。
- 第二行乘以-2加到第一行:
。
- 提取逆矩阵:经过初等行变换后,增广矩阵变为[E∣B],其中B=
即为A的逆矩阵
所以,矩阵A的逆矩阵为
。
3.5 正交矩阵
如果一个方阵和它的转置矩阵的乘积是单位矩阵的话,我们就说这个矩阵是正交的。反过来说也是成立的。
如果一个矩阵是正交的,那么它的转置矩阵和逆矩阵是一样的。
正交矩阵的特点:
我们可以得出以下结论:
1、矩阵的每一行,即、
和
是单位矢量,只有这样它们和自己的点积才能是1
2、矩阵的每一行,即、
和
之间相互垂直,只有这样它们之间的点积才能是0
3、上述结论对矩阵的每一列同样适用
因此,如果这些基矢量是一组标准正交基的话,那么我们就可以直接使用转置矩阵来求得该变换的逆变换。
4、行矩阵还是列矩阵
一个矢量可以转换成一个行矩阵或列矩阵。它本身没什么区别,但是,当我们把它和另一个矩阵相乘时,就会出现一些差异。
假设有一个矢量,我们将它的行、列矩阵分别和矩阵
相乘:
和行矩阵相乘要放在矩阵的左边:
和列矩阵相乘要放在矩阵的右边:
认真比较会发现,结果矩阵除了行列矩阵的区别外,里面的元素也是不一样的。这就意味着,在和矩阵相乘时选择行矩阵还是列矩阵来表示矢量是非常重要的,因为这决定了矩阵相乘法的书写次序和结果值。
在Unity中,常规做法是把矢量放在矩阵的右侧,即把矢量转换成列矩阵来进行运算。
5、矩阵的几何意义:变换
5.1 线性变换
指的是那些可以保留矢量加和标量乘的变换。用数学公式来表示这两个条件就是:
缩放就是一种线性变换。例如,可以表示一个大小为2的统一缩放。可以发现,
是满足上述两个条件的。
线性变换包括:旋转、缩放、错切、镜像、正交投影等。
仅有线性变换时不够的,平移变换就不是一个线性变换,例如,它满足标量乘法,但不满足矢量加法。
如果令,那么:
可见,两个运算得到的结果是不一样的。因此,不能用一个3x3的矩阵来表示一个平移变换。这样就有了仿射变换。
5.2 仿射变换
是合并线性变换和平移变换的变换类型。仿射变换可以使用一个4x4的矩阵来表示,为此,我们需要把矢量扩展到四维空间下,这就是齐次坐标空间。
下表给出了图形学中常见变换矩阵的名称和它们的特性。

5.3 齐次坐标
由于3x3的矩阵不能表示平移操作,那么就将其扩展到了4x4的矩阵。为此,我们还需要把原来的三维矢量转换成四维矢量,也就是我们所说的齐次坐标(齐次坐标的维度可以超过四维,本文所说的齐次坐标泛指四维齐次坐标)。
对于一个点,从三维坐标转换成齐次坐标是把其w分量设为1,而对于方向矢量来说,需要把其分量设为0。这样设置会导致,当用一个4x4矩阵对一个点进行变换时,平移、旋转、缩放都会施加于该点,但是如果是用于一个方向矢量,平移效果就会被忽略。
5.3.1 分解基础变换矩阵
把表示纯平移、纯旋转和纯缩放的变换矩阵叫做基础变换矩阵。这些矩阵具有一些共同点,我们可以把一个基础变换矩阵分解成4个组成部分:
其中,左上角的矩阵用于表示旋转和缩放,
用于表示平移,
是零矩阵,右下角的元素就是标量1。
5.3.2 平移矩阵
对点做平移变换:
对矢量做平移变换:
显而易见,平移变换不会对矢量产生任何影响。这点很容易理解,前面已经说过矢量是没有位置属性的。
平移矩阵的逆矩阵就是反向平移得到的矩阵:
平移矩阵并不是一个正交矩阵。
5.3.3 缩放变换
对一个模型沿空间的x轴、y轴、z轴进行缩放变换:
对矢量进行缩放变换:
如果缩放系数,这样的缩放称为统一缩放,否则称为非统一缩放。
缩放矩阵的逆矩阵是使用原缩放系数的倒数进行缩放变换:
缩放矩阵一般不是正交矩阵。上面的矩阵只适用于沿坐标轴方向进行缩放。如果沿任意方向进行缩放,就需要使用一个复合变换。其中一种方法的主要思想就是:先将缩放轴变换成标准坐标轴,然后进行沿坐标轴的缩放,再进行逆变换得到原来的缩放轴朝向。
5.3.4 旋转矩阵
旋转矩阵是三种常见的变换矩阵中最复杂的一种。旋转操作需要指定一个旋转轴,这个旋转轴不一定是空间的坐标轴,下面列举的是围绕空间的x轴、y轴、z轴进行旋转。
将点绕着x轴旋转度:
将点绕着y轴旋转度:
将点绕着z轴旋转度:
旋转矩阵的逆矩阵是旋转相反角度得到的变换矩阵。旋转矩阵是正交矩阵,而且多个旋转矩阵之间的串联同样是正交的。
5.3.5 复合变换
复合变换就是把平移、旋转和缩放组合起来,形成一个复杂的变换过程。
复合变换可以通过矩阵的串联来实现。例如先缩放、再旋转、最后平移,可以表示如下:
由于我们使用的是列矩阵,因此阅读顺序是从右到左的。
为了从数学公式上理解变换顺序的本质,我们可以对比不同变换顺序产生的变换矩阵的表达式。
如果我们只考虑对y轴的旋转的话,按先缩放、再旋转、最后平移这样的顺序组合3种变换得到的变换矩阵是:
而如果我们使用其他变换顺序,例如先平移,再缩放,最后旋转,那么得到的变换矩阵是:
从两个结果可以看出,得到的变换矩阵是不一样的。
除了需要注意不同类型的变换顺序外,还要小心旋转的变换顺序。当我们给出了分别绕x轴、y轴和z轴旋转的变换矩阵。一个问题是,它们的顺序如何定义呢?
在Unity中,这个旋转顺序是zxy,这在旋转相关的API文档中都有说明。
旋转角度
:
绕坐标系E下的z轴旋转
,绕坐标系E下的y轴旋转
,绕坐标系E下的x轴旋转
,即进行一次旋转时不一起旋转当前坐标系。
5.3.6 法线变换
法线也被称为法矢量。法线变换是一种特殊的变换。
使用原变换矩阵的逆转置矩阵来变换法线就可以得到正确的结果。值得注意的事,如果变换矩阵是正交矩阵,那么
,因此
,也就是说我们可以使用用于变换顶点的变换矩阵来直接变换法线。
1、如果变换只包括旋转变换,那么这个变换矩阵就是正交矩阵,可以用于法线变换。
2、如果变换只包含旋转和统一缩放,而不包含非统一缩放,可以将变换矩阵乘以用于法线变换。
3、如果变换包含了非统一变换,那么我们就必须要求解逆矩阵来得到变换法线的矩阵
四、坐标空间
坐标空间必须指明原点位置和3个坐标轴的方向。每个坐标空间都是另一个坐标空间的子空间。
现在,我们已知子空间的3个坐标轴在父空间
下的表示
、
、
,以及原点位置
。当给定一个子坐标空间中的一点
,我们可以确定其在父坐标空间下的位置
:
1、从坐标空间的原点开始
2、向x轴方向移动a个单位
3、向y轴方向移动b个单位
4、向z轴方向移动c个单位
现在,我们已经求出了:
子坐标空间到父坐标空间的变换矩阵,记为
对矢量的坐标空间变换可以使用3x3的矩阵表示:
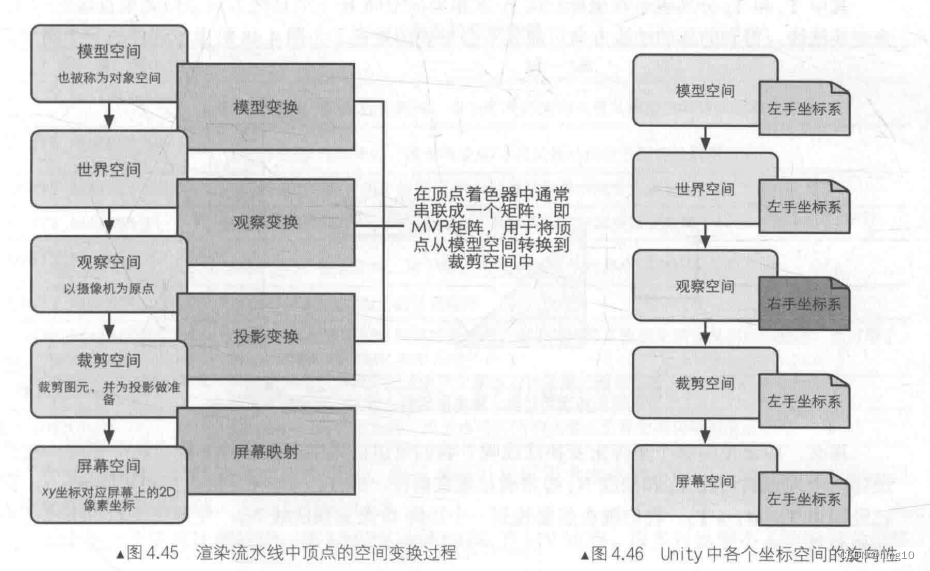
1、模型空间
也被称为对象空间或局部空间。每个模型都有自己独立的坐标空间,当它移动或旋转的时候,模型空间也会跟着它移动和旋转。
在Unity在中,模型空间中使用的是左手坐标系。
模型空间的原点和坐标轴通常是由美术人员在建模软件里确定好的。
2、世界空间
它是一个特殊的坐标系,因为它建立了我们所关心的最大的空间。
在Unity在中,世界空间中使用的是左手坐标系。
顶点变换的第一步,就是将顶点坐标从模型空间变换到世界空间中。这个变换通常叫做模型变换。
3、观察空间
观察空间也被称为摄像机空间。
在Unity在中,观察空间中使用的是右手坐标系。
顶点变换的第二步,就是将顶点坐标从世界空间变换到观察空间中。这个变换通常叫做观察变换。
4、裁剪空间
顶点接下来要从观察空间转换到裁剪空间(也被称为齐次裁剪空间)中,这个用于变换的矩阵叫做裁剪矩阵,也被称为投影矩阵。
视椎体:决定裁剪空间的范围。视椎体由六个平面包围而成,这些平面也被称为裁剪平面。
视椎体有两种类型,这涉及两种投影类型:一种是正交投影,一种是透视投影。使用的矩阵叫投影矩阵。
5、屏幕空间
经过投影矩阵的变换后,就可以进行裁剪操作。当完成了所有的裁剪工作后,就需要进行真正的投影了,也就是将视椎体投影到屏幕空间中。
屏幕空间是一个二维空间。
首先,我们需要进行标准齐次除法,也被称为透视除法。就是用齐次坐标系的w分量去除以x、y、z分量。进过这一步后会将裁剪空间变到一个立方体内。
6、总结
五、Unity Shader的内置变量
内置着色器变量 - Unity 手册
1、变换
所有这些矩阵都是float4x4类型,并且是列主序的。
| 名称 | 值 |
| UNITY_MATRIX_MVP | 当前模型 * 视图 * 投影矩阵。用于将顶点/方向矢量从模型空间变换到裁剪空间 |
| UNITY_MATRIX_MV | 当前模型 * 视图矩阵。用于将顶点/方向矢量从模型空间变换到观察空间 |
| UNITY_MATRIX_V | 当前视图矩阵。用于将顶点/方向矢量从世界空间变换到观察空间 |
| UNITY_MATRIX_P | 当前投影矩阵。用于将顶点/方向矢量从观察空间变换到裁剪空间 |
| UNITY_MATRIX_VP | 当前视图 * 投影矩阵。用于将顶点/方向矢量从世界空间变换到裁剪空间 |
| UNITY_MATRIX_T_MV | 模型转置 * 视图矩阵。UNITY_MATRIX_MV的转置矩阵 |
| UNITY_MATRIX_IT_MV | 模型逆转置 * 视图矩阵。UNITY_MATRIX_MV的逆转置矩阵,用于将法线从模型空间变换到观察空间,也可用于得到UNITY_MATRIX_MV的逆矩阵 |
| unity_ObjectToWorld | 当前模型矩阵。用于将顶点/方向矢量从模型空间变换到世界空间 |
| unity_WorldToObject | 当前世界矩阵的逆矩阵。用于将顶点/方向矢量从世界空间变换到模型空间 |
2、摄像机和屏幕
这些变量将对应于正在渲染的摄像机。例如,在阴影贴图渲染中,它们仍将引用摄像机组件值,而不是用于阴影贴图投影的“虚拟摄像机”。
| 名称 | 类型 | 值 |
| _WorldSpaceCameraPos | float3 | 摄像机的世界空间位置。 |
| _ProjectionParams | float4 | x 是 1.0(如果当前使用翻转投影矩阵进行渲染,则为 –1.0),y 是摄像机的近平面,z 是摄像机的远平面,w 是远平面的倒数。 |
| _ScreenParams | float4 | x 是摄像机目标纹理的宽度(以像素为单位),y 是摄像机目标纹理的高度(以像素为单位),z 是 1.0 + 1.0/宽度,w 为 1.0 + 1.0/高度。 |
| _ZBufferParams | float4 | 用于线性化 Z 缓冲区值。x 是 (1-远/近),y 是 (远/近),z 是 (x/远),w 是 (y/远)。 |
| unity_OrthoParams | float4 | x 是正交摄像机的宽度,y 是正交摄像机的高度,z 未使用,w 在摄像机为正交模式时是 1.0,而在摄像机为透视模式时是 0.0。 |
| unity_CameraProjection | float4x4 | 摄像机的投影矩阵。 |
| unity_CameraInvProjection | float4x4 | 摄像机投影矩阵的逆矩阵。 |
| unity_CameraWorldClipPlanes[6] | float4 | 摄像机视锥体平面世界空间方程,按以下顺序:左、右、底、顶、近、远。 |
3、时间
时间以秒为单位,并由项目 Time 设置中的时间乘数 (Time multiplier) 进行缩放。没有内置变量可用于访问未缩放的时间。
| 名称 | 类型 | 值 |
| _Time | float4 | 自关卡加载以来的时间 (t/20, t, t*2, t*3),用于将着色器中的内容动画化。 |
| _SinTime | float4 | 时间正弦:(t/8, t/4, t/2, t)。 |
| _CosTime | float4 | 时间余弦:(t/8, t/4, t/2, t)。 |
| unity_DeltaTime | float4 | 增量时间:(dt, 1/dt, smoothDt, 1/smoothDt)。 |
4、光照
光源参数以不同的方式传递给着色器,具体取决于使用哪个渲染路径, 以及着色器中使用哪种光源模式通道标签。
前向渲染(ForwardBase 和 ForwardAdd 通道类型):
| 名称 | 类型 | 值 |
| _LightColor0(在 UnityLightingCommon.cginc 中声明) | fixed4 | 光源颜色。 |
| _WorldSpaceLightPos0 | float4 | 方向光:(世界空间方向,0)。其他光源:(世界空间位置,1)。 |
| unity_WorldToLight(在 AutoLight.cginc 中声明) | float4x4 | 世界/光源矩阵。用于对剪影和衰减纹理进行采样。 |
| unity_4LightPosX0、unity_4LightPosY0、unity_4LightPosZ0 | float4 | (仅限 ForwardBase 通道)前四个非重要点光源的世界空间位置。 |
| unity_4LightAtten0 | float4 | (仅限 ForwardBase 通道)前四个非重要点光源的衰减因子。 |
| unity_LightColor | half4[4] | (仅限 ForwardBase 通道)前四个非重要点光源的颜色。 |
| unity_WorldToShadow | float4x4[4] | 世界/阴影矩阵。聚光灯的一个矩阵,方向光级联最多有四个矩阵。 |
延迟着色和延迟光照,在光照通道着色器中使用(全部在 UnityDeferredLibrary.cginc 中声明):
| 名称 | 类型 | 值 |
| _LightColor | float4 | 光源颜色。 |
| unity_WorldToLight | float4x4 | 世界/光源矩阵。用于对剪影和衰减纹理进行采样。 |
| unity_WorldToShadow | float4x4[4] | 世界/阴影矩阵。聚光灯的一个矩阵,方向光级联最多有四个矩阵。 |
为 ForwardBase、PrePassFinal 和 Deferred 通道类型设置了球谐函数系数 (由环境光和光照探针使用)。这些系数包含由世界空间法线求值的三阶 SH 函数(请参阅 UnityCG.cginc 中的 ShadeSH9)。 这些变量都是 half4 类型、unity_SHAr 和类似名称。
顶点光照渲染(Vertex 通道类型):
最多可为 Vertex 通道类型设置 8 个光源;始终从最亮的光源开始排序。因此,如果您希望 一次渲染受两个光源影响的对象,可直接采用数组中前两个条目。如果影响对象 的光源数量少于 8,则其余光源的颜色将设置为黑色。
| 名称 | 类型 | 值 |
| unity_LightColor | half4[8] | 光源颜色。 |
| unity_LightPosition | float4[8] | 视图空间光源位置。方向光为 (-direction,0);点光源/聚光灯为 (position,1)。 |
| unity_LightAtten | half4[8] | 光源衰减因子。x 是 cos(spotAngle/2) 或 –1(非聚光灯);_y_ 是1/cos(spotAngle/4) 或 1(非聚光灯);_z_ 是二次衰减;_w_ 是平方光源范围。 |
| unity_SpotDirection | float4[8] | 视图空间聚光灯位置;非聚光灯为 (0,0,1,0)。 |
5、光照贴图
| 名称 | 类型 | 值 |
| unity_Lightmap | Texture2D | 包含光照贴图信息。 |
| unity_LightmapST | float4[8] | 缩放 UV 信息并转换到正确的范围以对光照贴图纹理进行采样。 |
6、雾效和环境光
| 名称 | 类型 | 值 |
| unity_AmbientSky | fixed4 | 梯度环境光照情况下的天空环境光照颜色。 |
| unity_AmbientEquator | fixed4 | 梯度环境光照情况下的赤道环境光照颜色。 |
| unity_AmbientGround | fixed4 | 梯度环境光照情况下的地面环境光照颜色。 |
| UNITY_LIGHTMODEL_AMBIENT | fixed4 | 环境光照颜色(梯度环境情况下的天空颜色)。旧版变量。 |
| unity_FogColor | fixed4 | 雾效颜色。 |
| unity_FogParams | float4 | 用于雾效计算的参数:(density / sqrt(ln(2))、density / ln(2)、–1/(end-start) 和 end/(end-start))。x 对于 Exp2 雾模式很有用;_y_ 对于 Exp 模式很有用,_z_ 和 w 对于 Linear 模式很有用。 |
7、其他
| 名称 | 类型 | 值 |
| unity_LODFade | float4 | 使用 LODGroup 时的细节级别淡入淡出。x 为淡入淡出(0 到 1),_y_ 为量化为 16 级的淡入淡出,_z_ 和 w 未使用。 |
| _TextureSampleAdd | float4 | 根据所使用的纹理是 Alpha8 格式(值设置为 (1,1,1,0))还是不是该格式(值设置为 (0,0,0,0))由 Unity 仅针对 UI 自动设置。 |
六、答疑解惑
1、使用3x3还是4x4的变换矩阵
对于线性变换(例如旋转和缩放)来说,仅使用3×3的矩阵就足够表示所有的变换了。但如果存在平移变换,我们就需要使用4x4的矩阵。因此,在对顶点的变换中,我们通常使用4x4的变换矩阵。当然,在变换前我们需要把点坐标转换成齐次坐标的表示,即把顶点的W分量设为1。而在对方向失量的变换中,我们通常使用3×3的矩阵就足够了,这是因为平移变换对方向失量是没有影响的。
2、CG中的矢量和矩阵类型
我们通常在Unity Shader中使用CG作为着色器编程语言。在CG中变量类型有很多种,但在本节我们是想解释如何使用这些类型进行数学运算。因此,我们只以float家族的变量来做说明。
在CG中,矩阵类型是由float3x3、float4x4等关键词进行声明和定义的。而对于float3、float4
等类型的变量,我们既可以把它当成一个矢量,也可以把它当成是一个1xn的行矩阵或者一个n
x1的列矩阵。这取决于运算的种类和它们在运算中的位置。例如,当我们进行点积操作时,两个
操作数就被当成失量类型,如下:
float4 a = float4(1.0, 2.0, 3.0, 4.0);
float4 b = float4(1.0, 2.0, 3.0, 4.0);
//对两个失量进行点积操作
float result = dot(a, b);
但在进行矩阵乘法时,参数的位置将决定是按列矩阵还是行矩阵进行乘法。在CG中,矩阵乘法是通过mul函数实现的。例如:
float4 v = float4(1.0, 2.0, 3.0, 4.0);
float4x4 M = float4x4(1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0);
//把v当成列矩阵和矩阵M进行右乘
float4 column_mul_result = mul(M, v);
//把v当成行矩阵和矩阵M进行左乘
float4 row_mul_result = mul(v, M);
//注意:column_mul_result不等于row_mul_result,而是
// mul (M, v) == mul (v, tranpose(M))
// mul (v, M) == mul (tranpose(M), v)
因此,参数的位置会直接影响结果值。通常在变换顶点时,我们都是使用右乘的方式来按列矩阵进行乘法。这是因为,Unity提供的内置矩阵(如UNITY_MATRIX_MVP等)都是按列存储的。但有时,我们也会使用左乘的方式,这是因为可以省去对矩阵转置的操作。
需要注意的一点是,CG对矩阵类型中元素的初始化和访间顺序。在CG中,对float4x4等类型的变量是按行优先的方式进行填充的。什么意思呢?我们知道,想要填充一个矩阵需要给定一串数学,例如,如果需要声明一个3×4的矩阵,我们需要提供12个数字。那么,这串数字是一行一行地填充矩阵还是一列一列地填充矩阵呢?这两种方式得到的矩阵是不同的。例如,我们使用(1, 2, 3, 4, 5, 6, 7,8, 9)去填充一个3×3的矩阵,如果是按照行优先的方式,得到的矩阵是:
如果是按照列优先的方式,得到的矩阵是:
CG使用的是行优先的方法,即是一行一行地填充矩阵的。因此,如果读者需要自已定义一个矩阵时(例如,自已构建用于空间变换的矩阵),就要注意这里的初始化方式。
类似地,当我们在CG中访问一个矩阵中的元素时,也是按行来索引的。例如
//按行优先的方式初始化矩阵M
float3x3 M = float3x3(1.0, 2.0, 3.0,
4.0, 5.0, 6.0,
7.0, 8.0, 9.0);
//得到M的第一行,即(1.0, 2.0, 3.0)
float3 row = M[0];
//得到M的第2行第1列的元素,即4.0
float ele = M[1][0];
之所以Unity Shader中的矩阵类型满足上述规则,是因为使用的是CG语言。换句话说,上
面的特性都是CG的规定。
如果读者熟悉Unity的API,可能知道Unity在脚本中提供了一种矩阵类型Matrix4x4。脚本中的这个矩阵类型则是采用列优先的方式。这与Unity Shader中的规定不一样,希望读者在遇到时不会感到困惑。
3、Unity中的屏幕坐标:ComputeScreenPos/VPOS/WPOS
在写 Shader 的过程中,我们有时候希望能够获得片元在屏幕上的像素位置。在顶点/片元看色器中,有两种方式来获得片元的屏幕坐标。
一种是在片元着色器的输入中声明VPOS或WPOS语义(关于什么是语义,可参见5.4节)VPOS是HLSL中对屏幕坐标的语义,而WPOS 是CG 中对屏幕坐标的语义。两者在Unity Shader
中是等价的。我们可以在HLSL/CG 中通过语义的方式来定义顶点/片元着色器的默认输入,而不
需要目已定义输人输出的数据结构。这里的内容有一些超前,因为我们还没有具体讲解顶点/片元
看色器的写法,读者在这里可以只关注VPOS和 WPOS的语义。使用这种方法,可以在片元着色器中这样写:
fixed4 frag(float4 sp : VPOS) : SV_Target {
//用屏幕坐标除以屏幕分辨率 ScreenParams.xy,得到视口空间中的坐标
return fixed4 (sp.xy/_ScreenParams.xy, 0.0, 1.0);
}
另一种方式是通过Unity提供的ComputeScreenPos函数。
Pass{CGPROGRAM#pragma vertex vert#pragma fragment frag#include "UnityCG.cginc"struct appdata{float4 vertex : POSITION;float2 uv : TEXCOORD0;};struct v2f{float2 uv : TEXCOORD0;float4 vertex : SV_POSITION;};struct vertOut{float4 pos :SV_POSITION;float4 scrPos : TEXCOORDO;};vertOut vert(appdata_base v) {vertOut o;o.pos = UnityObjectToClipPos (v.vertex);//第一步:把ComputeScreenPos 的结果保存到scrPos中o.scrPos = ComputeScreenPos (o.pos);return o;}fixed4 frag(vertOut i): SV_Target {//第二步:用scrPos.xy除以scrPos.w得到视口空间中的坐标float2 wcoord = (i.scrPos.xy/i.scrPos.w);return fixed4(wcoord,0.0,1.0);}ENDCG}效果如下:

将上面的frag改成这样,会得到一个动态效果:
Pass{CGPROGRAM#pragma vertex vert#pragma fragment frag#include "UnityCG.cginc"struct appdata{float4 vertex : POSITION;float2 uv : TEXCOORD0;};struct v2f{float2 uv : TEXCOORD0;float4 vertex : SV_POSITION;};v2f vert (appdata v){v2f o;o.vertex = UnityObjectToClipPos(v.vertex);o.uv = v.uv;return o;}fixed4 frag(v2f i): SV_Target {fixed3 col = 0.5 + 0.5*cos(_Time.y + i.uv.xyx + fixed3(0,2,4));return fixed4(col, 1.0);}ENDCG}