全景拼接
1. 将读取进行灰度转化,并且输出图像,关键点和计算描述
import cv2
import numpy as np# 将读取进行灰度转化,并且输出图像,关键点和计算描述
image_left = cv2.imread("C:\\Users\\HONOR\\Desktop\\image\\pinjie_1.png")
image_right = cv2.imread("C:\\Users\\HONOR\\Desktop\\image\\pinjie_2.png")
imge_letf = cv2.resize(image_left, (image_right.shape[1], image_left.shape[0]))
print(imge_letf.shape)
# 图像灰度化
image_left_gray = cv2.cvtColor(image_left, cv2.COLOR_RGB2GRAY)
image_right_gray = cv2.cvtColor(image_right, cv2.COLOR_RGB2GRAY)
# 创建sift对象
sift = cv2.SIFT_create()
# 计算关键点
kp_left, des_left = sift.detectAndCompute(image_left_gray, None)
kp_right, des_right = sift.detectAndCompute(image_right_gray, None)
# 绘制关键点
draw_left = cv2.drawKeypoints(image_left_gray, kp_left, None, flags=cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS
)
draw_right = cv2.drawKeypoints(image_right_gray, kp_right, None, flags=cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS
)
# 显示图片
cv2.imshow('draw_left', np.hstack((image_left, draw_left)))
cv2.imshow('draw_right', np.hstack((image_right, draw_right)))
cv2.waitKey(0)
# 保存图片
cv2.imwrite('draw_left.png', np.hstack((image_left, draw_left)))
cv2.imwrite('draw_right.png', np.hstack((image_right, draw_right)))
运行后保存图片:


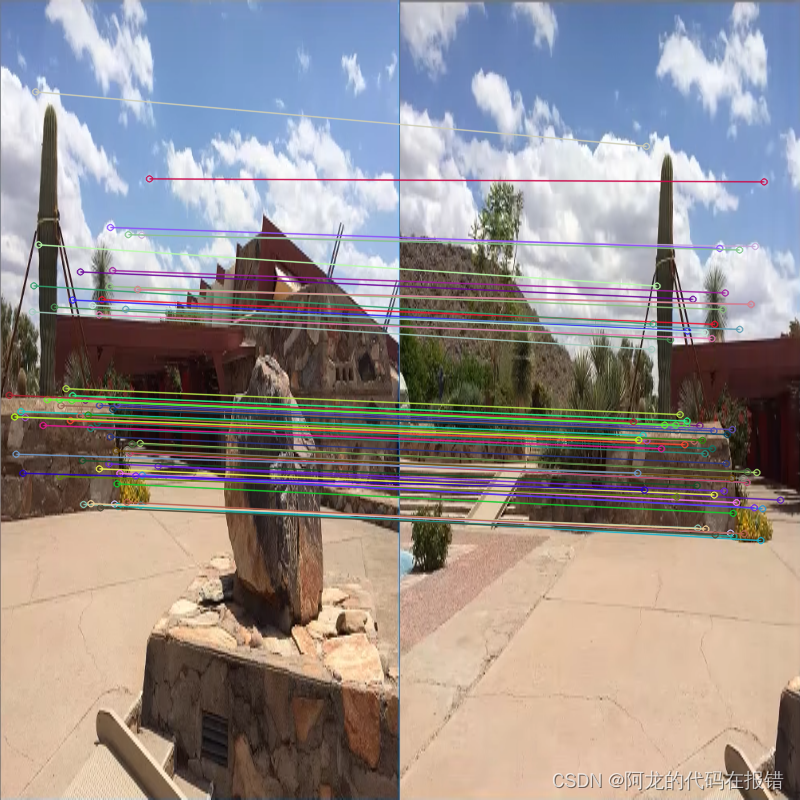
2.利用匹配器 匹配两个描述符的相近程度,并将特征点进行连线
# 使用**cv.BFMatcher**()创建BFMatcher对象
bf = cv2.BFMatcher()
# 利用匹配器 匹配两个描述符的相近程度
# (knn 匹配可以返回k个最佳的匹配项 bf返回所有的匹配项)
matches = bf.knnMatch(des_right, des_left, k=2)
# 按照相近程度,进行排序
matches = sorted(matches, key=lambda x: x[0].distance / x[1].distance)good = []for m, n in matches:# 对欧式距离进行筛选dif m.distance < 0.6 * n.distance:good.append(m)
all_good_image = cv.drawMatches(img_right, key_right, img_left, key_left, good_match, None, None, None, None, flags=2)bfs.img_show("关键点之间进行连线", all_goog_image)
3.对图像进行拼接
if len(good) > 4:ptsR = np.float32([kp_right[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)ptsL = np.float32([kp_left[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)ransacReprojThreshold = 4Homography, status = cv2.findHomography(ptsR, ptsL, cv2.RANSAC, ransacReprojThreshold)Panorama = cv2.warpPerspective(image_right, Homography, (image_right.shape[1] + image_left.shape[1], image_right.shape[0]))cv2.imshow("扭曲变换后的右图", Panorama)cv2.imwrite('扭曲变换后的右图.png', Panorama)cv2.waitKey(0)cv2.destroyAllWindows()Panorama[0:image_left.shape[0], 0:image_left.shape[1]] = image_leftcv2.namedWindow("全景图", cv2.WINDOW_AUTOSIZE)cv2.imshow("全景图", Panorama)cv2.imwrite("END.png", Panorama)cv2.waitKey(0)cv2.destroyAllWindows()


Panorama[0:image_left.shape[0], 0:image_left.shape[1]] = image_left
ValueError: could not broadcast input array from shape (376,498,3) into shape (374,498,3)
以上保存的原因是:出现这个问题的主要原因是因为list中array的shape不一致造成的,所以发生这个问题的时候。
解决方法:这个 时候检测一下面这两段代码有没有起作用
image_right = cv2.resize(image_right, (400, 800))
image_left = cv2.resize(image_left, (400, 800))
bug解决:

如果我们的扭曲变换后的图和最后的图出现这样的情况的话我们需要关注一下以下代码
因为这个段代码是将左图`des_left`作为模板图,右图作为`des_right`最为去匹配的图
matches = bf.knnMatch(des_left, des_right, k=2)但是这两段代码所反映的情况是将右图作为模板图进行拼接(也就是计算机蒙了)Panorama = cv2.warpPerspective(image_right, Homography, (image_right.shape[1] + image_left.shape[1], image_right.shape[0]))Panorama[0:image_left.shape[0], 0:image_left.shape[1]] = image_left
源码:
# -*- coding: UTF-8 -*-
# @Project :opencv
# @File :全景拼接笔记.py
# @Author :阿龙的代码在报错
# @IDE :PyCharm
# @Date :2024/4/13 16:23
import cv2
import numpy as np# 将读取进行灰度转化,并且输出图像,关键点和计算描述
image_left = cv2.imread("C:\\Users\\HONOR\\Desktop\\image\\pinjie_1.png")
image_right = cv2.imread("C:\\Users\\HONOR\\Desktop\\image\\pinjie_2.png")
# 将图片设置为同样的大小
image_right = cv2.resize(image_right, (400, 800))
image_left = cv2.resize(image_left, (400, 800))
# 图像灰度化
gray_left = cv2.cvtColor(image_left, cv2.COLOR_BGR2GRAY)
gray_right = cv2.cvtColor(image_right, cv2.COLOR_BGR2GRAY)sift = cv2.SIFT_create()kp_left, des_left = sift.detectAndCompute(image_left, None)
kp_right, des_right = sift.detectAndCompute(image_right, None)draw_left = cv2.drawKeypoints(gray_left, kp_left, None, flags=cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS)draw_right = cv2.drawKeypoints(gray_right, kp_right, None, flags=cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS)# 显示图片
cv2.imshow('draw_left', np.hstack((image_left, draw_left)))
cv2.imshow('draw_right', np.hstack((image_right, draw_right)))
cv2.waitKey(0)
# 保存图片
cv2.imwrite('draw_left.png', np.hstack((image_left, draw_left)))
cv2.imwrite('draw_right.png', np.hstack((image_right, draw_right)))# 使用**cv.BFMatcher**()创建BFMatcher对象
bf = cv2.BFMatcher()
# 利用匹配器 匹配两个描述符的相近成都
# (knn 匹配可以返回k个最佳的匹配项 bf返回所有的匹配项)
matches = bf.knnMatch(des_right, des_left, k=2)# queryDescriptors:查询图像的特征描述子集 (第一个参数)
# trainDescriptors:训练图像的特征描述子集 (第二个参数)
# 按照相近程度,进行排序
matches = sorted(matches, key=lambda x: x[0].distance / x[1].distance)good = []for m, n in matches:# 对欧式距离进行筛选if m.distance < 0.6 * n.distance:good.append(m)
all_goog_image = cv2.drawMatches(image_right, kp_right, image_left, kp_left, good, None, None, None, None, flags=2
)
cv2.imshow("关键点之间进行连线", all_goog_image)
cv2.imwrite('all_good.png', all_goog_image)if len(good) > 4:ptsR = np.float32([kp_right[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)ptsL = np.float32([kp_left[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)ransacReprojThreshold = 4Homography, status = cv2.findHomography(ptsR, ptsL, cv2.RANSAC, ransacReprojThreshold)Panorama = cv2.warpPerspective(image_right, Homography, (image_right.shape[1] + image_left.shape[1], image_right.shape[0]))cv2.imshow("扭曲变换后的右图", Panorama)cv2.imwrite('扭曲变换后的右图.png', Panorama)cv2.waitKey(0)cv2.destroyAllWindows()Panorama[0:image_left.shape[0], 0:image_left.shape[1]] = image_leftcv2.namedWindow("全景图", cv2.WINDOW_AUTOSIZE)cv2.imshow("全景图", Panorama)cv2.imwrite("END.png", Panorama)cv2.waitKey(0)cv2.destroyAllWindows()