项目来源:河北大学计算机视觉课程-杨老师.
一共有四个标题,本篇博客只完成前两问。
目录
实验目的:
实验内容:
实验步骤:
1.水果图像的分割
>掩膜图像Mask 是什么?
>改进:去除反光部分的影响
2.目标的特征提取
>Canny算子?
>图像矩 Hu矩阵 是什么?
实验目的:
1.掌握物体分类模型中的决策树模型和SVM模型;
3.掌握利用Matlab/Python进行物体分类的方法;
3.设计Matlab/Python程序,实现一个水果分级系统。
在本项目中,我选择Python。
实验内容:
1.对输入的水果图片进行分割,得到水果的目标图像。
2.设计特征提取方法,实现对水果目标的特征提取,产生特征向量;
3.利用得到的特征向量,设计决策树实现水果分级;
4.用带标签的特征集训练SVM,设计基于SVM的水果分级系统。
实验步骤:
1.水果图像的分割
设计合理的分割算法,实现对单个水果的分割;分割之前需要进行图像增强。
2.目标的特征提取
设计合理的特征提取方法,实现对水果目标的特征提取(如:颜色特征、形状特征、纹理特征等),产生特征向量;
注:是否需要进行特征选择,需根据实际情况做出选择。
根据当前水果目标的实际情况,给特征向量添加标签,以便产生训练样本集。
1.水果图像的分割
代码:
import cv2
import numpy as np#图像增强,调整alpha(对比度因子)和beta(亮度加成)来增强图像
def enhance_image(image, alpha, beta):"""alpha :对比度beta :亮度"""#np.clip确保像素值在0到255的范围内new_image = np.clip(alpha * image + beta, 0, 255)#将结果转换为8位无符号整数类型return new_image.astype(np.uint8)#图像分割函数,使用HSV颜色空间和颜色阈值来分割图像中的水果。
def segment_fruit(image):# BGR图像转换为HSV色彩空间# HSV色彩空间包含三个通道 Hue色调、饱和度Saturation、明度Valuehsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)# 设置苹果颜色的HSV阈值范围来检测苹果的颜色,范围可调整# 第一组为检测较浅的红色或橙色lower_red = np.array([0, 50, 50])upper_red = np.array([10, 255, 255])# 第二组为检测较深的红色lower_red2 = np.array([170, 50, 50])upper_red2 = np.array([180, 255, 255])# 创建颜色掩模,两个掩模分别表示图像中属于指定颜色范围的区域# mask是二值图像,保留白色像素,丢弃黑色像素mask1 = cv2.inRange(hsv_image, lower_red, upper_red)mask2 = cv2.inRange(hsv_image, lower_red2, upper_red2)# 合并红色区域的两个不同范围的掩模mask = mask1 + mask2# 二值掩模中,相加操作等同逻辑“或”操作# 只要任一掩模为白色(即值为255),合并后的掩模在该位置也为白色# 应用掩模获取最终结果result = cv2.bitwise_and(image, image, mask=mask)# bitwise_and():将原始BGR图像与其自身进行按位与操作,使用合并后的掩模作为条件# 这样,只有掩模中为白色的区域(即检测到的颜色区域)会保留在结果图像中,其余区域将变为黑色。# 返回应用掩模后得到的图像,只包含检测到的颜色区域return result# 加载图像
image_path = 'apple.jpg' #图片路径
image = cv2.imread(image_path)
image = cv2.resize(image, (350, 350)) # 调整图像大小# 图像增强
alpha = 1.5 #对比度
beta = 50 #亮度
enhanced_image = enhance_image(image,alpha,beta)# 图像分割
segmented_image = segment_fruit(enhanced_image)# 显示结果
cv2.imshow('Original Image', image)
cv2.imshow('Enhanced Image', enhanced_image)
cv2.imshow('Segmented Image', segmented_image)cv2.waitKey(0) #等待用户按键
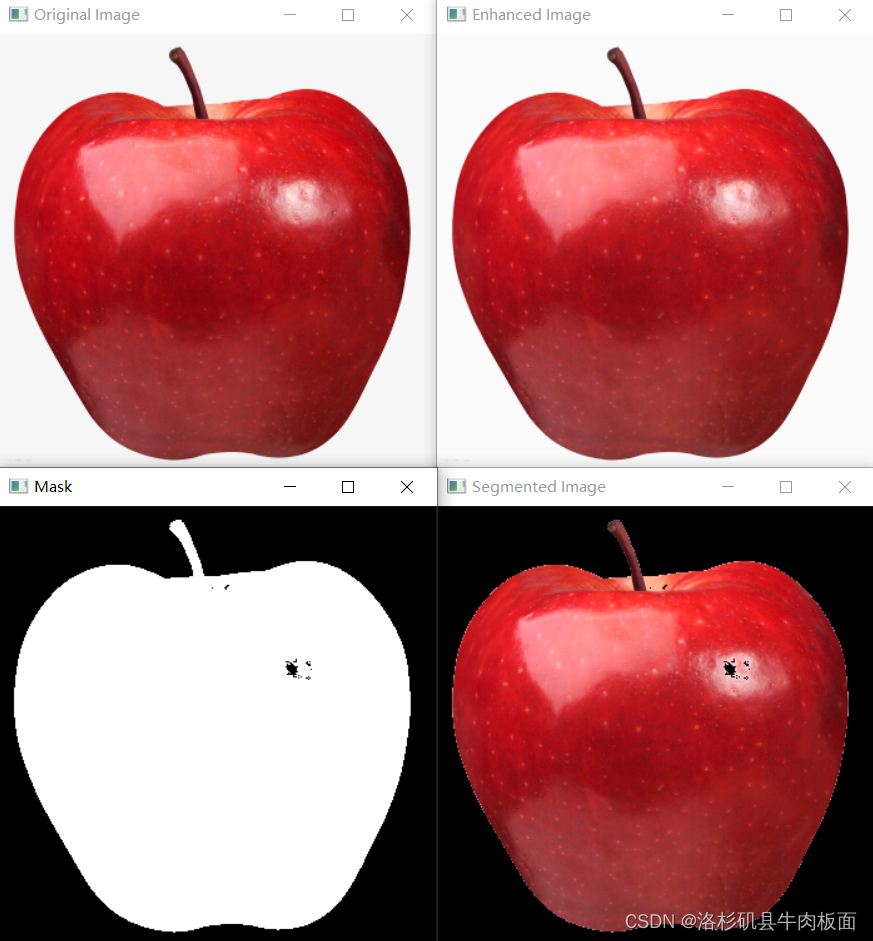
cv2.destroyAllWindows() #关闭所有OpenCV窗口运行结果:
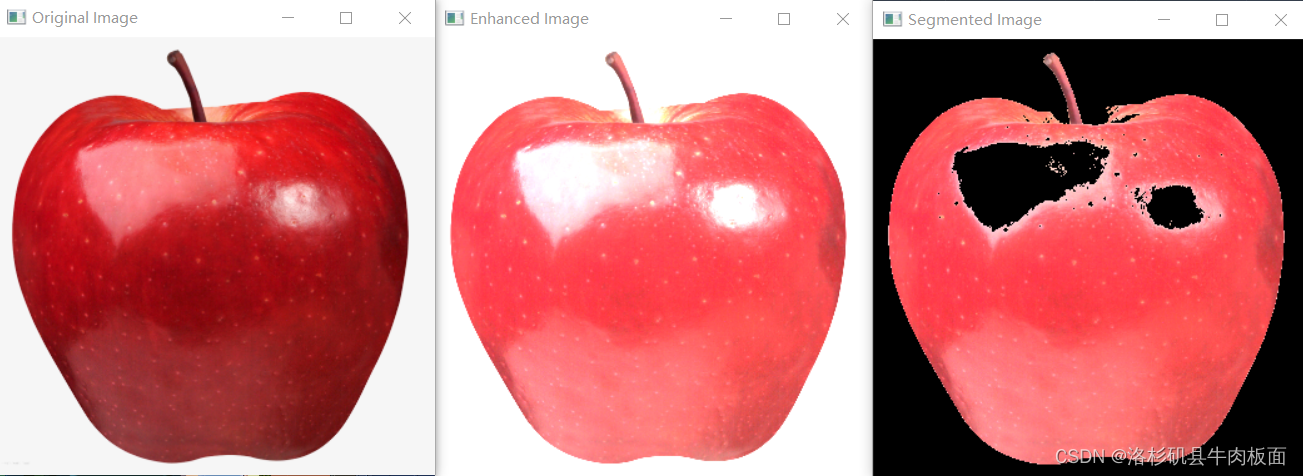
观察结果,发现苹果图像被增强后,原本是红色的部分被反光成白面,反光面的颜色阈值超出了我们所设定的范围,这就导致在进行图像分割时,原本属于苹果的部分被掩膜图像覆盖掉,被丢弃了。
>掩膜图像Mask 是什么?
什么是图像中的掩膜(Mask),如何使用掩码_图像掩膜-CSDN博客
推荐一篇很好的博客。
掩膜定义:掩膜通常是一个与原始图像大小相同的二值或布尔图像,选定的区域被标记为1(或True),其余区域被标记为0(或False)。
用途:当对图像应用一个操作时,掩膜可以用来限制这个操作只在图像的特定区域内发生,提取感兴趣区,感兴趣区内图像值保持不变,而区外图像值都为0。
实现方式:编程时,掩膜通常是一个数组或矩阵,其大小与原图像相同。使用掩膜时,只处理掩膜数组中值为1(或True)的对应像素,而忽略值为0(或False)的像素。
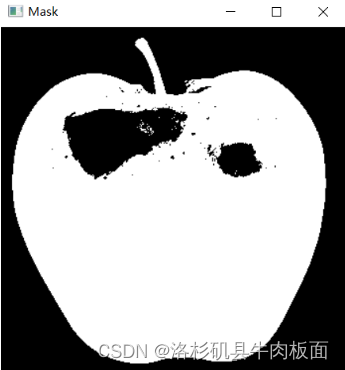
简单来说,掩膜实现了只关注感兴趣区域内的图像部分,需要的留下来(像素值非0);不需要的就“丢弃”掉,像素值为0。 所以掩膜图像一般呈现黑白色。
在代码中输出Mask图像:
>改进:去除反光部分的影响
以下是去除反光部分的一些方法:
- 图像预处理:
- 平滑处理:使用高斯模糊或其他平滑滤波器来减少图像中的噪声和细节,有助于减少反光造成的边缘效应。
- 直方图均衡化:增强图像的对比度,使得反光区域和水果其他部分的对比度更加明显。
- 色彩空间转换:将图像从RGB色彩空间转换到HSV、Lab或其他色彩空间,以便更好地分离颜色和亮度信息。在HSV色彩空间中,可调整V(亮度)通道以减少反光的影响。
- 反光区域检测:
- 阈值处理:根据亮度或色彩差异,通过设定阈值来检测并标记反光区域。
- 形态学操作:使用膨胀、腐蚀等形态学操作来增强或消除反光区域的特征。
- 边缘检测:利用反光区域通常具有较明显的边缘特征,通过边缘检测算法来识别反光区域。
- 反光区域修复:
- 插值:在检测到反光区域后,可以使用周围像素的插值来替换或修复这些区域。
- 区域填充:如果反光区域是连续的,可以使用区域填充算法来填充这些区域,并用周围像素的平均值或其他方法来替代。
- 图像修复技术:使用更高级的图像修复技术,如基于样本的图像修复或深度学习方法,来修复反光区域。
- 特征提取和分割:
- 使用颜色、纹理和形状特征:提取用于分割的特征时,考虑使用颜色、纹理和形状等多种特征,以更好地描述水果和反光区域的差异。
- 深度学习:使用深度学习技术训练模型,该模型能够识别并分割水果图像中的反光区域,需大量的标记数据来训练模型。
- 后处理:
- 优化分割结果:使用形态学操作、阈值处理或其他技术来优化分割结果,以减少反光区域对分割结果的影响。
- 人工检查:对于重要的应用或需要高精度分割的场景,可以引入人工检查步骤来验证和校正分割结果。
我的方法:尝试调整HSV色彩空间中的参数,降低对比度alpha和亮度beta参数的值:
运行一遍,效果好很多,反光部位大部分被检测到了:
2.目标的特征提取
选取一张苹果图片,对它进行颜色特征和形状特征的提取,并且生成特征向量,并添加标签。
代码:
import cv2# 提取图像的颜色特征,使用颜色直方图。
def extract_color_features(image):# 计算三个颜色通道的直方图并将其展平color_features = []#遍历图像的BGR三个颜色通道(蓝、绿、红)for i in range(3): # BGR三个通道# cv2.calcHist函数计算颜色直方图# 直方图的bin数量为256(像素值范围0-255),且范围是[0, 256]hist = cv2.calcHist([image], [i], None, [256], [0, 256])#将计算得到的每个通道的直方图展平 二维 -> 一维 ,添加到color_features中color_features.extend(hist.flatten())#查看hist的类型,为一维列表#print('hist type:',type(hist))# 返回包含颜色通道直方图的color_features列表return color_features# 提取图像的形状特征,使用Canny边缘检测和Hu矩。
def extract_shape_features(image):# 使用Canny算法检测边缘,100和200是Canny算法中的双阈值,用于确定哪些边缘应被保留edges = cv2.Canny(image, 100, 200)# cv2.moments计算边缘图像的空间矩,述了边缘图像的形状特性moments = cv2.moments(edges) # 使用Hu矩提取形状特征# cv2.HuMoments从空间矩中计算Hu矩# Hu矩是一组七个数值,它们对于图像的缩放、旋转和平移是不变的,常用于形状识别hu_moments = cv2.HuMoments(moments).flatten()return hu_moments.tolist() #计算得到的Hu矩展平并转换为列表 并返回# 生成特征向量并添加标签。
def create_feature_vector(image, label):color_features = extract_color_features(image) # 颜色特征shape_features = extract_shape_features(image) # 形状特征#查看一下颜色特征和形状特征的长度print("color_features size:", len(color_features))print("shape_features size:", len(shape_features))feature_vector = color_features + shape_featuresfeature_vector.append(label) # 添加标签return feature_vector# 加载图像
image_path = 'apple.jpg'
image = cv2.imread(image_path)
image = cv2.resize(image, (350, 350)) # 调整图像大小# 生成特征向量
label = 1 # 添加标签
feature_vector = create_feature_vector(image, label)# 输出特征向量
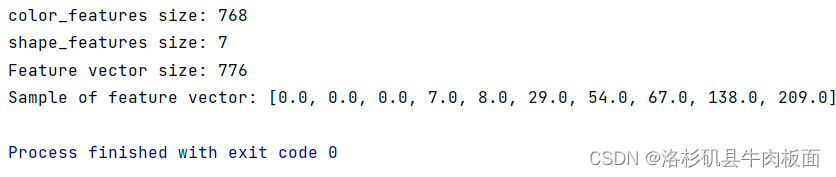
print("Feature vector size:", len(feature_vector))
print("Sample of feature vector:", feature_vector[:10]) # 展示部分特征向量运行结果,结果展示了所提取出的颜色特征和形状特征向量的长度(一维),以及部分特征总向量,同时对所读取的图片添加了标签lable:
>Canny算子?
数字图像处理(20): 边缘检测算子(Canny算子)_canny算子公式-CSDN博客
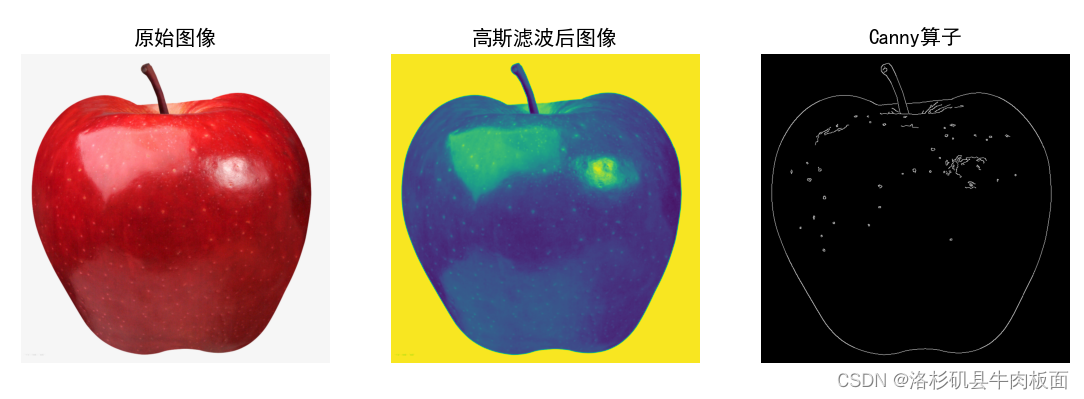
在网上偶然看到了以为大牛的代码,展现了Canny算子对于图像处理的效果,同时也对图像进行了高斯去噪:
import cv2
import matplotlib.pyplot as plt# 用来正常显示中文标签
plt.rcParams['font.sans-serif'] = ['SimHei']# 读取图像
img = cv2.imread('apple.jpg')
img_RGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 转成RGB 方便后面显示grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 灰度处理
gaussianBlur = cv2.GaussianBlur(grayImage, (3, 3), 0) # 高斯滤波# 阈值处理
ret, binary = cv2.threshold(gaussianBlur, 127, 255, cv2.THRESH_BINARY)# Canny算子
Canny = cv2.Canny(gaussianBlur, 50, 150)'''
# Roberts算子
kernelx = np.array([[-1, 0], [0, 1]], dtype=int)
kernely = np.array([[0, -1], [1, 0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)# Prewitt算子
kernelx = np.array([[1, 1, 1], [0, 0, 0], [-1, -1, -1]], dtype=int)
kernely = np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)# Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)# Laplacian算子
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize=3)
Laplacian = cv2.convertScaleAbs(dst)
'''#显示图形
plt.subplot(131), plt.imshow(img_RGB), plt.title('原始图像'), plt.axis('off') # 坐标轴关闭
plt.subplot(132), plt.imshow(gaussianBlur),plt.title('高斯滤波后图像'),plt.axis('off')
plt.subplot(133), plt.imshow(Canny, cmap=plt.cm.gray), plt.title('Canny算子'), plt.axis('off')
plt.show()运行结果,可以看到图像在进行高斯滤波后和Canny边缘检测后的效果:
>图像矩 Hu矩阵 是什么?
图像矩(Hu矩)简介-CSDN博客
图像或轮廓的Hu矩的定义、优缺点、适用范围,并利用OpenCV的函数HuMoments()和matchShapes()实现Hu矩的计算和轮廓匹配-CSDN博客
图像的hu矩是一种具有平移、旋转和尺度不变性的图像特征。因此在图像具有旋转和放缩的情况下Hu矩具有更广泛的应用领域。
各阶矩的物理意义:
普通矩:
0阶矩(m00):目标区域的质量
1阶矩(m01,m10):目标区域的质心
2阶矩(m02,m11,m20):目标区域的旋转半径
3阶矩(m03,m12,m21,m30):目标区域的方位和斜度,反应目标的扭曲但是目标区域往往伴随着空间变换(平移,尺度,旋转),所以需要在普通矩的基础上构造出具备不变性的矩组—hu矩。
接下来的实验步骤,需要对水果图像数据集进行分级,如根据水果的大小分为4级,可以使用决策树、SVM、神经网络等机器学习分类算法。下一章博客再更新。