
文章目录
- 引入
- 一、百度Apollo视觉感知模块概述
- 二、启动感知模块
- 步骤一:进入 Docker 环境并启动 Dreamview
- 步骤二:选择车型和地图
- 步骤三:启动所需模块
- 步骤四:启动视觉感知模块
- 三、在 Dreamview 上可视化检测结果
- 步骤一:下载并解压数据包
- 步骤二:将数据包复制指定目录
- 步骤三:进入 Docker 环境并启动 Dreamview
- 步骤四:选择车型和地图
- 步骤五:启动所需模块
- 步骤六:修改输出的 channel 名称
- 步骤七:启动视觉障碍物检测模块
- 步骤八:播放数据包
引入
随着自动驾驶技术的不断发展,视觉感知作为自动驾驶系统中的关键模块之一,在实现车辆环境感知和决策中发挥着重要作用。百度Apollo自动驾驶平台的视觉感知模块为自动驾驶车辆提供了强大的感知和理解能力,本文将探讨百度Apollo视觉感知模块的实践应用及其在自动驾驶领域的意义。
一、百度Apollo视觉感知模块概述
百度Apollo视觉感知模块是基于深度学习技术构建的模块,能够从车载摄像头等传感器获取的图像数据中提取关键信息,包括道路、车辆、行人等目标的检测与识别,路况的理解与预测等。它能够实时高效地感知车辆周围的环境,为自动驾驶系统的决策和控制提供重要支持。

二、启动感知模块
步骤一:进入 Docker 环境并启动 Dreamview
-
进入 Apollo Docker 环境。
./apollo.sh -
在 Docker 环境里,启动 Dreamview。
./scripts/bootstrap.sh如果需要关闭 Dreamview,请您执行以下命令:
./scripts/bootstrap.sh stop
步骤二:选择车型和地图
-
在浏览器输入网址
http://localhost:8888/,打开 Dreamview。 -
选择车型和地图。
- 在 Dreamview 右上角的 –vehicle– 中,选择 mkz_example,
- 在 Dreamview 右上角的 –map– 中,选择 Sunnyvale Big Loop。
车辆选择后,程序会把会把
calibration/data目录下对应的车型参数和传感器内外参文件拷贝到作用目录下。地图选择后在 Dreamview 下便可以正常显示当前地图。
步骤三:启动所需模块
-
在 Dreamview 上打开 Transform 按钮。
您也可以在终端执行如下命令:
cyber_launch start /apollo/modules/transform/launch/static_transform.launchTransform 模块为了发布传感器各坐标系变换供各模块调用。
-
启动 image decompression 模块。
cyber_launch start modules/drivers/tools/image_decompress/launch/image_decompress.launch视觉模块依赖的输入是相机传感器采集到的图像数据,image decompression 模块可以将压缩的图像数据解压缩。
步骤四:启动视觉感知模块
启动红绿灯检测模块
cyber_launch start /apollo/modules/perception/production/launch/perception_trafficlight.launch
启动视觉障碍物检测模块
mainboard -d modules/perception/production/dag/dag_streaming_perception_camera.dag
这个命令会同时开启视觉障碍物检测和车道线检测,在启动时终端可能出现一些红色的警告提示,只要进程不退出都是正常现象,模型可以正常启动。
视觉感知模块启动需要一些时间,您可以通过下面两种方法判断是否启动完毕:
-
在终端执行如下命令,查看 GPU 的占用情况:
watch -n 0.1 nvidia-smi当 mainboard 进程显存占用不再变化,证明模型已经完成启动。
-
在 Docker 环境下,执行如下命令:
tail -f /apollo/data/log/mainboard.INFO该命令表示实时显示 cyber 日志的尾部。当屏幕中该日志显示如下信息时,则可以确定感知模块已启动完毕。

(可选)单独启动车道线检测模块
mainboard -d ./modules/perception/production/dag/dag_streaming_perception_lane.dag
三、在 Dreamview 上可视化检测结果
视觉障碍物主要检测远处(>50m)的障碍物。视觉障碍物感知结果不单独输出,而是跟激光雷达的检测结果融合后输出。为了让您直观地感受 Apollo 视觉感知模块的输出,本文档把视觉感知的结果单独输出。完成视觉感知实践操作后,要将 channel 的修改复原,以免影响雷达感知的输出。
在 Dreamview 上查看视觉感知的检测结果,请您按照以下步骤对配置文件进行修改:
步骤一:下载并解压数据包
数据包里存放了我们路测时采集的数据,包括定位、感知、预测规划等模块的信息。我们提供了测试数据包 demo_sensor_data_for_vision.tar.xz 供开发者进行测试。
wget https://apollo-system.cdn.bcebos.com/dataset/6.0_edu/demo_sensor_data_for_vision.tar.xz
tar -xvf demo_sensor_data_for_vision.tar.xz
步骤二:将数据包复制指定目录
为了在 Docker 中可以访问 record,将下载的数据包复制到 /apollo/data/bag 目录下。
步骤三:进入 Docker 环境并启动 Dreamview
-
进入 Apollo Docker 环境。
./apollo.sh -
在 Docker 环境里,启动 Dreamview。
./scripts/bootstrap.sh注意:再次启动 Dreamview 前,请您先关闭 Dreamview。
步骤四:选择车型和地图
-
在浏览器输入网址
http://localhost:8888/,打开 Dreamview。 -
选择车型和地图。
- 在 Dreamview 右上角的 –vehicle– 中,选择 mkz_example,
- 在 Dreamview 右上角的 –map– 中,选择 Sunnyvale Big Loop。
车辆选择后,程序会把会把
calibration/data目录下对应的车型参数和传感器内外参文件拷贝到作用目录下。地图选择后在 Dreamview 下便可以正常显示当前地图。
步骤五:启动所需模块
-
在 Dreamview 上打开 Transform 按钮。
您也可以在终端执行如下命令:
cyber_launch start /apollo/modules/transform/launch/static_transform.launchTransform 模块为了发布传感器各坐标系变换供各模块调用。
-
启动 image decompression 模块。
cyber_launch start modules/drivers/tools/image_decompress/launch/image_decompress.launch视觉模块依赖的输入是相机传感器采集到的图像数据,image decompression 模块可以将压缩的图像数据解压缩。
步骤六:修改输出的 channel 名称
视觉障碍物检测默认的输出 channel 为 /perception/obstacles,不会在 Dreamview 上显示检测结果。如果想要在 Dreamview 上可视化结果,需要修改下面文件的一部分关键字。
- 打开文件。
vim modules/perception/production/conf/perception/camera/fusion_camera_detection_component.pb.txt
-
定位到第 10 行,修改为:
output_final_obstacles : true -
定位到第 11 行,修改为:
output_obstacles_channel_name : "/apollo/perception/obstacles"注意:请您修改完 channel 信息之后,再启动障碍物检测模块。否则会检测不到障碍物。
步骤七:启动视觉障碍物检测模块
mainboard -d modules/perception/production/dag/dag_streaming_perception_camera.dag
注意:成功启动的判定标准是观察处理器的显存不再发生变化或者 cyber 日志尾部输出结束信息。
步骤八:播放数据包
等到感知模块成功启动后,执行如下命令:
cyber_recorder play -f /apollo/data/bag/demo_sensor_data_for_vision.record -k /apollo/perception/obstacles /apollo/prediction
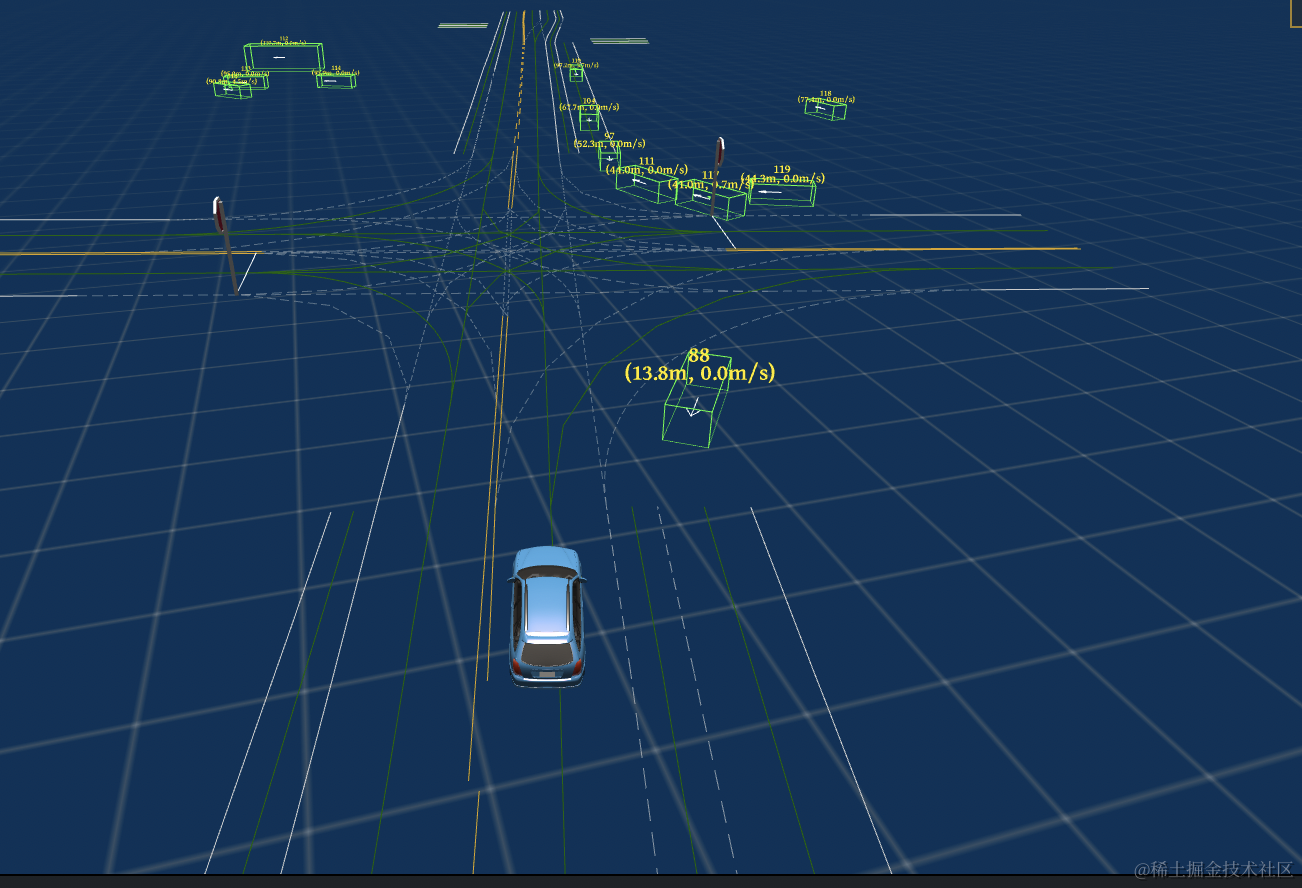
如果在 Dreamview 可以看到障碍物,说明模块启动成功,如下图所示。图中的绿色框便是我们的视觉感知算法检测出的障碍物。
完成视觉感知实践操作后,要将 channel 的修改复原,以免影响雷达感知的输出。

![[游戏陪玩系统] 陪玩软件APP小程序H5游戏陪玩成品软件源码-线上线下可爆改家政,整理师等功能](https://img-blog.csdnimg.cn/direct/e756cae400a140589a61e53490c5d280.png)

