摘要: 悬浮显示技术是一种非常具有发展前景的显示技术,它可以将图像显示在空中,给观看者带来沉浸感和临场感的体验。目前国内悬浮3D显示技术研究还处于初级阶段。文章提出基于集成成像的悬浮3D显示系统,系统由集成成像3D显示器、半透半反镜和逆反光膜组成;分析了集成成像3D显示的工作原理和逆反光膜的悬浮显示原理。将集成成像3D显示技术与基于逆反光膜的悬浮显示技术相结合,集成成像3D显示器发出的光线经过半透半反镜的反射到达逆反光膜,逆反光膜将光线以入射的角度进行反射并重建出3D图像,在实现3D图像悬浮显示的同时也解决了集成成像3D图像深度反转的问题,但是3D图像的亮度被大幅度的降低。系统为悬浮3D显示提供新的理论依据,为解决集成成像3D图像深度反转提供新的方法。
关键词:悬浮3D显示;逆反光膜;集成成像;深度反转
引言
悬浮3D显示技术是一种非常具有发展前景的显示技术,它可以将3D图像显示在空中,在一定程度上提升3D图像的立体感,给观看者带来具有沉浸感和临场感的3D体验,在医疗、教育、军事和娱乐等方面具有广阔的应用前景。悬浮3D显示技术由悬浮显示技术和裸眼3D显示技术两部分组成。
悬浮显示技术可以将图像显示在空中,可以提升图像的立体感。目前实现悬浮显示技术的方式有很多种,日本大阪大学提出采用水雾作为承接介质[1],将投影图像投射在水雾中实现悬浮显示,这种设计一般应用于大尺寸显示场景,由于水雾的密度不均匀,不稳定导致图像的分辨率很低。韩国首尔大学提出采用凸透镜将集成成像3D显示器生成的3D图像进行悬浮[2],该系统实现悬浮显示的原理简单,能够实现悬浮显示的基本效果,但是由于凸透镜的限制导致悬浮图像的观看视视场角小,凸透镜作为悬浮器件结构单一,像差抑制能力很差。日本宇都宫大学提出采用逆反射膜作为悬浮器件[3],采用二维LED阵列作为发光源,生成悬浮的平面图像。日本早稻田大学提出采用二面角反射镜阵列作为悬浮器件[4],搭建了观看视角为90°的悬浮显示系统,该系统有效的扩大了悬浮图像的观看视角。国内在悬浮显示方面也有大量的研究,如东超科技研制了负折射平板透镜,它可以将物体发出的发散光线在空中进行再次重新汇聚实现悬浮显示。像航科技研制了微通道矩阵光波导平板,开发了无接触电梯按键等悬浮显示设备。
裸眼3D显示技术可以分为光栅3D显示、集成成像3D显示、全息3D显示和体3D显示等。由于集成成像3D显示可以提供全彩色、全视差、无视疲劳、无需佩戴设备且数据量小等优势被认为是目前最具有发展前景的3D显示技术之一[5-7]。集成成像3D显示技术被Lippmann于1908年提出[8]。但是集成成像3D显示目前仍然存在观看视角小,分辨率低、景深浅、深度反转等问题亟待解决。其中,深度反转问题严重制约了集成成像3D显示技术的发展。
1931年,Ives通过实验发现了Lippmann提出的集成成像技术具有深度反转的问题,并提出了两步记录法来解决深度反转的问题[9],该方法把集成成像3D显示器重建出来的3D图像重新作为物体,再利用一个微透镜阵列进行第二步记录,这样再次重建出的3D图像就具有正确的深度关系。1978年,Y.Igarish等提出了计算机生成集成成像,利用计算机来完成无深度反转的集成成像记录[10]。1988年,L.Yang等提出使用两层传导屏来解决深度反转问题[11],其结构与两步记录法相似。1998年,J.Arai等采用具有梯度折射率的微透镜阵列进行记录[12],以及J.Seo等采用负微透镜阵列,都同样解决了深度反转问题。日本广播协会的Okano 等提出通过将每个单元图像绕其中心旋转180°来显示深度位置正确的三维场景[14],但是再现的三维图像中心深度平面只能位于透镜阵列后方,无法实现浮动显示。韩国首尔大学提出使用全息微透镜阵列光学元件的相位共轭重构技术[15],其本质上是将单元图像翻转180°,只是实现方式不同,只能用虚模式集成成像显示。西班牙瓦伦西亚大学提出一种智能深度翻转算法[16,17],能够同时实现深度翻转效应消除和集成成像采集参数到显示参数的匹配。通过总结不难发现解决集成成像3D图像深度反转的方法可以分为基于光学器件和基于计算机算法两类。除了在深度反转问题上的研究之外,国内四川大学在集成成像3D显示的多视区显示[18]和集成成像3D显示器光线高利用率[19]方面进行了研究。
2016年日本宇都宫大学将基于逆反射膜作为悬浮器件的悬浮显示技术与集成成像3D显示技术相结合[20],搭建了悬浮光场3D显示系统。该系统将集成成像3D显示器重建的3D图像悬浮在空中,有效增强了3D图像的立体感。2017年中国科学技术大学提出了基于两片逆反射膜的悬浮3D显示系统[21],该系统有效的提升了3D图像的悬浮深度和有效观看视区。2018年北京邮电大学采用自由曲面反射镜与集成成像3D显示技术结合[22],搭建了悬浮3D显示系统。该系统有效的降低了由于透镜畸变引起的图像失真问题,重建出大悬浮深度和高质量的悬浮3D图像。
本文研究基于集成成像的悬浮光场3D显示系统,该系统由集成成像3D显示器、半透半反镜和逆反光膜组成;分析了集成成像3D显示的工作原理和逆反光膜的悬浮显示原理;将集成成像3D显示技术与基于逆反光膜的悬浮显示技术相结合,解决了集成成像3D图像深度反转的问题,并实现了3D图像的悬浮显示。
1 基本原理
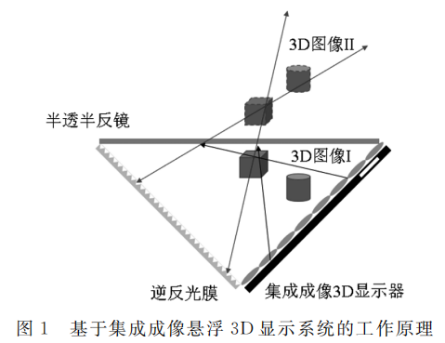
基于集成成像的悬浮3D显示系统的工作原理如图1所示,该系统由集成成像3D显示器、半透半反镜和逆反光膜组成。集成成像3D显示器由2D显示屏和微透镜阵列组成。传统集成成像3D显示存在深度反转的问题,这是由于集成成像3D图像的获取过程和3D图像的重建过程是镜像对称的,通过微透镜阵列获取得到的微图像阵列加载在2D显示屏中,通过微透镜阵列重建出3D图像I。3D图像I的深度是反转的,3D图像I中“立方体"位于“圆柱体"的左上方。集成成像3D显示器发出的光线经过半透半反镜的反射到达逆反光膜,这些光线在经过逆反光膜的反射沿原来的路径进行通过半透半反射镜在空中重建出3D图像II。集成成像3D显示器发出的光线经过逆反射膜的反射将3D图像悬浮在空气中,并且对3D图像的深度再次进行反转,3D图像II中“立方体"位于“圆柱体"的左下方。该系统使集成成像3D显示生成的图像悬浮在空中,并且对3D图像的深度进行校正。
1.1集成成像3D显示的基本原理
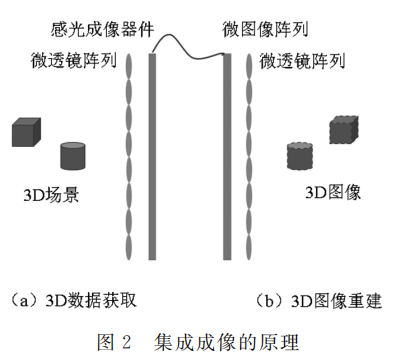
集成成像包括3D数据获取和3D图像重建两个过程。集成成像的3D数据获取过程如图2(a)所示,该过程利用一个微透镜阵列对3D场景进行成像,并把图像记录到位于微透镜阵列焦平面上的感光成像器件上。微透镜阵列上的每个透镜元从不同的位置和方向记录下3D场景的部分信息,每个透镜元下对应生成的图像被称为图像元。把微透镜阵列上所有透镜元下生成的图像元记录到一起生成微图像阵列。集成成像3D图像的重建过程如图2(b)所示,该过程利用与3D数据获取过程中的微透镜阵列具有相同参数的微透镜阵列来重建3D图像。把微图像阵列呈现在2D显示屏上,2D显示屏上微图像阵列发出的光线经过微透镜阵列的成像功能,根据光路可逆原理在空间中重建出3D图像。在早期的实验中采用针孔阵列来替代微透镜阵列,也可以实现集成成像3D数据的获取和3D图像的重建。
集成成像3D数据获取过程3D场景发出的光线被微透镜阵列获取。在集成成像3D图像重建过程中,2D显示屏上微图像阵列发出的光线经过微透镜阵列在空间中重建出3D图像,3D数据的获取和3D图像的重建过程是镜像对称的,在原3D场景中“立方体"位于“圆柱体"的左上方,在重建的3D图像中“立方体”位于“圆柱体“的右上方。因此导致重建3D图像的深度是反转的。
1.2基于逆反光膜悬浮显示的工作原理
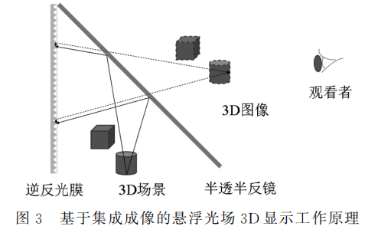
基于逆反光膜悬浮显示的工作原理图如图3所示。3D场景发出的光线经过半透半反镜的反射到达逆反光膜,光线在逆反光膜上进行两次反射之后,出射光线与入射逆反光膜时的光线是平行的,出射光线透过半透半反镜在空间中重建出3D图像,这样观看者就可以观看到悬浮在空气中的3D图像。
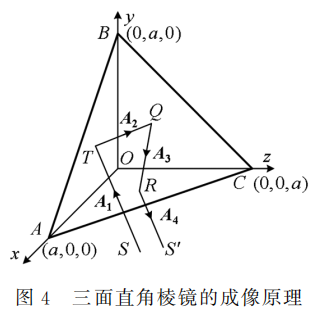
逆反光膜是由多个微三面直角棱镜排列组成,为了方便分析,这里只讨论单个三面直角棱镜的成像原理,三面直角棱镜有三个等腰直角边为a的三角形组成,并且三面直角棱镜的内壁是镜面反射的,三面直角棱镜的成像原理如图4所示。设光线沿ST方向入射经T、Q、R点反射后,由RS曚方向出射,设A1、A2、A3、A4分别为ST、TQ、QR和RS的单位矢量,反射面AOB、BOC和COA的法线单位矢量分别可以表示为
n1=-k (1)
n2=-i (2)
n3=-j (3)
射向反射面AOB的入射光线A1的单位矢量可表示为
A1=-li-mj-nk (4)
式中,l、m、n为光线A1在x、y、z轴上的方向数,且l、m和n之间的关系可以表示为
l2+m2+n2=1 (5)
光线A1经AOB面反射后射向反射面BOC,反射光线A2单位矢量可由矢量反射定律决定,因此反射光线A2单位矢量可表示为
A2=A1-2(A1·k)k=-li-mj+nk (6)
光线A2射向BOC后的反射光线A3的单位矢量可表示为
A3=A2-2(A2 · i)i=li-mj+nk (7)
光线A3射向COA反射后的光线经A4的单位矢量可表示为
A4=A3-2(A3·j)j=li+mj+nk (8)
通过对比式(4)和(8)可知,入射光线与出射光线在x、y、z轴上的方向数都没有发生变化,只是矢量方向发生变化,这说明入射光线和出射光线是平行的,但是光线的传播方向是相反的。
根据以上分析可知,3D场景发出的光线经过半透半反镜的反射到达逆反光膜,逆反光膜可以将光线沿原路进行返回在空间中重建出3D图像,并且重建图像的深度是反转的。由于逆反光膜是基于光线的反射成像,没有光轴也没有焦距,因此3D场景与重建的3D图像的尺寸是1:1的。
1.3 基于逆反光膜的悬浮3D显示原理
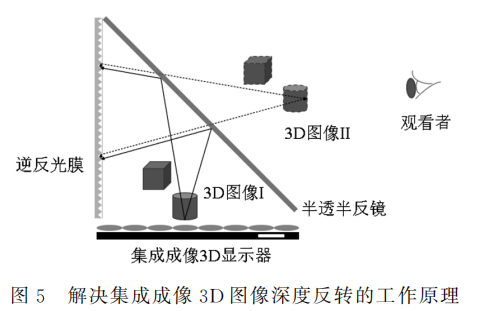
基于逆反光膜解决集成成像3D图像深度反转的工作原理如图5所示。将集成成像3D显示重建的3D图像替代了原来的3D场景。集成成像3D显示器重建出3D图像I,3D图像I发出的光线经过半透半反镜的反射到达逆反光膜,光线经过逆反光膜的反射在半透半反镜前再次重建出3D图像Ⅱ。由于逆反光膜生成的图像与3D场景是1:1大小的,并且在深度上是反转的。因此经过逆反射膜重建的3D图像Ⅱ与集成成像3D显示器重建的3D图像I是等大的、镜像对称的,并且3D图像Ⅱ与3D图像I在深度上是反转的。集成成像3D显示器重建的3D图像I与原3D场景在深度上反转的。如图2所示,在3D场景中“立方体"位于“圆柱体"的左上方,经过集成成像3D显示重建的3D图像I中,“立方体"位于“圆柱体"的右上方,深度上是反转的。将集成成像3D显示器平放,重建的3D图像I中“立方体"位于“圆柱体"的左上方,经过逆反射膜的再次成像重建出3D图像Ⅱ,在3D图像Ⅱ中“立方体"位于“圆柱体"的左上方,因此集成成像3D显示的深度被得到校正。观看者看到的3D图像Ⅱ的深度与原3D场景的深度是一致的。
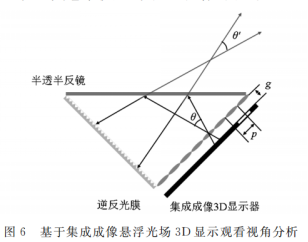
2D显示屏上的微图像阵列与微透镜阵列精密耦合重建出3D图像,2D显示屏发出的光线被微透镜阵列进行调制,使显示屏发出的光线被控制在3D图像的观看视角内,如图6所示。根据集成成像3D图像的看视角公式θ=2arctan(p/2g),其中p为微透镜阵列的节距,g为微透镜阵列到显示屏之间的距离,可知3D图像的观看视角为11.5°。2D显示屏与微透镜阵列之间的缝隙用黑色材料进行封装使显示屏发出的光线不会直接到达半透半反镜和逆反光膜,避免了其它串扰光线对3D图像的影响。
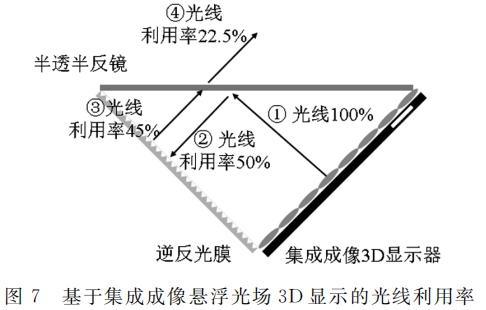
假设理想状态下显示屏发出的光线全部经过微透镜阵列,并且不会被微透镜阵列吸收。光线经过半透半反镜时,有50%的光线到达逆反光膜。逆反光膜的反射效率≥90%,光线再次经过逆反光膜的反射,只有45%的光线沿入射时的方向进行反射。反射光线透过半透半反射镜被人眼看到,最终光线的利用率仅有22.5%,如图7所示。
基于逆反光膜的集成成像悬浮光场3D显示,可以将集成成像3D显示器重建的3D图像进行悬浮,解决集成成像3D图像深度反转的问题,3D图像的观看视角不会受到影响,但是3D图像的亮度被大幅度的降低。
2 实验
基于集成成像的悬浮3D显示系统实验装置如图8所示,该系统由集成成像3D显示器、半透半反镜和逆反光膜组成。其中集成成像3D显示器由iPhone13Pro的手机屏来显示微图像阵列,显示屏幕的分辨率为2532暳1170,像素点尺寸为55.2毺m。采用的微透镜阵列中微透镜元的节距为1.5mm,焦距为7mm。
在3Dmax中创建3D场景,3D场景包含“1"和“2"两个物体,“2"位于“1"的右前方。其中“1"位于虚拟相机阵列的聚焦面后5cm的位置,“2"位于虚拟相机阵列的聚焦面前5cm的位置,虚拟相机阵列聚焦在坐标系的零点,如图9所示。在3Dmax中创建虚拟相机阵列,获取不同位置的视差图,采用像素映射算法生成实验所需要的微图像阵列,如图10所示。
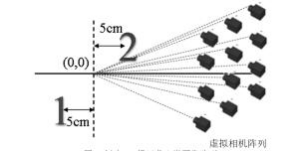
图9创建3D场景获取微图像阵列

图10微图像阵列
采用传统集成成像3D显示器重建的3D图像如图11所示。依次从左到右获取重建3D图像五个不同视点的视差图。在原3D场景中“2"位于“1"的右前方,根据遮挡关系,当从左到右观看原3D场景时,“1"和“2"之间的距离应该是依次减小。通过观察图10的实验结果,发现从左到右的观看重建的3D图像时,“1"和“2"之间的距离依次变大,因此传统集成成像3D显示器重建的3D图像存在深度反转的问题。

图11传统集成成像3D显示效果
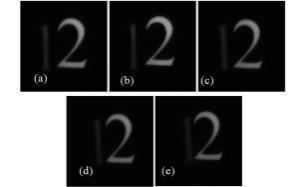
图12基于集成成像的悬浮3D显示效果
基于集成成像的悬浮3D显示系统的3D显示效果如图12所示。依次从左到右获取重建3D图像五个不同视点的视差图。从左到右观看重建的3D图像时,“1"和“2"之间的距离依次减小,它们的遮挡关系与原3D场景的遮挡关系是一致的。因此,基于集成成像的悬浮3D显示系统可以有效的消除集成成像3D图像的深度反转问题,并且基于集成成像的悬浮3D显示系统可以将3D图像悬浮在空间中,实现3D图像悬浮显示。
3 结论
本文提出基于集成成像的悬浮3D显示系统,该系统由集成成像3D显示器、半透半反镜和逆反光膜组成。分析了集成成像3D显示的工作原理和逆反光膜的悬浮显示原理。逆反光膜可以将光线以入射的方向反射回去再次成像。因此将集成成像3D显示技术与基于逆反光膜的悬浮显示技术相结合,集成成像3D显示器发出的光线经过半透半反镜的反射到达逆反光膜,逆反光膜将光线以入射的角度进行反射并重新重建出3D图像,在实现3D图像悬浮显示的同时也解决了集成成像3D图像深度反转的问题,3D图像的观看视角不会受到影响,但是3D图像的亮度被大幅度的降低。在接下来的研究中拟引入偏振光来提升3D图像的亮度。该系统为悬浮3D显示提供新的理论依据,为解决集成成像3D图像深度反转提供新的方法
文章来源:光学技术 第49卷 第4期
作者:徐秋云,陈小刚,郑益,芦鹏,陈迪,潘柏晓,陈杰,赵悟翔
声明:转载此文目的在于传递更多信息,仅供读者学习、交流之目的。文章版权归原作者所有,如有侵权,请联系删除。