124 二叉树中的最大路径和
二叉树中的 路径 被定义为一条节点序列,序列中每对相邻节点之间都存在一条边。同一个节点在一条路径序列中 至多出现一次 。该路径 至少包含一个 节点,且不一定经过根节点。
路径和 是路径中各节点值的总和。
给你一个二叉树的根节点 root ,返回其 最大路径和 。
示例 1:
输入:root = [1,2,3]
输出:6
解释:最优路径是 2 -> 1 -> 3 ,路径和为 2 + 1 + 3 = 6
示例 2:
输入:root = [-10,9,20,null,null,15,7]
输出:42
解释:最优路径是 15 -> 20 -> 7 ,路径和为 15 + 20 + 7 = 42
提示:
树中节点数目范围是 [ 1 , 3 ∗ 1 0 4 ] [1, 3 * 10^4] [1,3∗104]
-1000 <= Node.val <= 1000
思路(参考树形 DP:树的直径【基础算法精讲 23】)
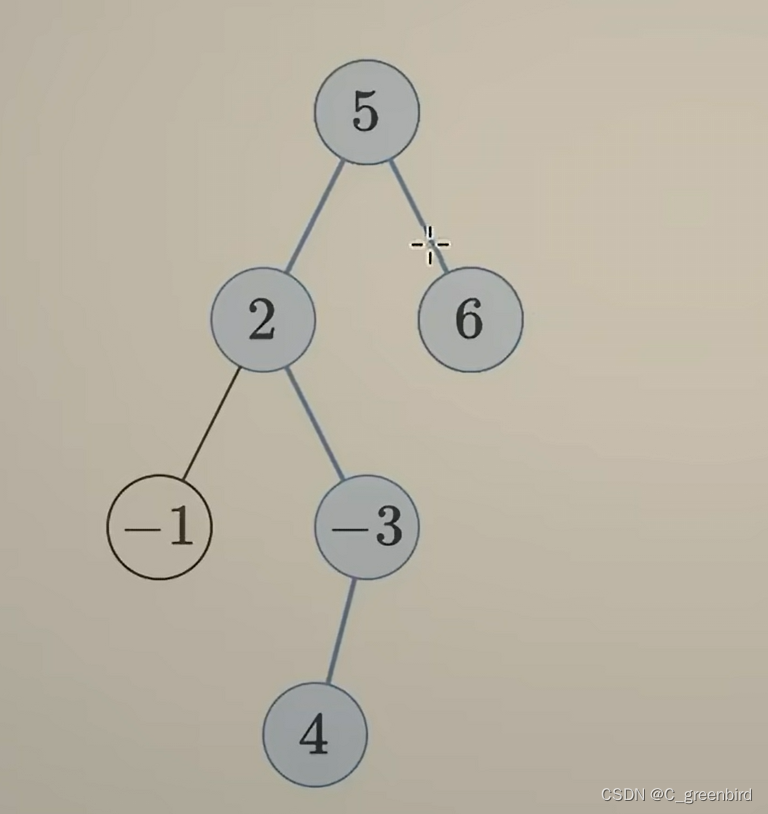
如下图所示,把5看作当前拐弯节点,那么其最大路径和为左子树的最大路径和+右子树的最大路径和+当前节点值。
可以在计算每个节点的最大路径和,顺便更新答案
在当前节点拐弯的最大路径和=左子树最大链和+右子树最大链和+当前节点值
求每个节点的最大路径和,返回给父节点的值为max(左子树最大链和,右子树最大链和)+当前节点,由于会有负数节点,还需要再和0比较取最大值。
代码
/*** Definition for a binary tree node.* struct TreeNode {* int val;* TreeNode *left;* TreeNode *right;* TreeNode() : val(0), left(nullptr), right(nullptr) {}* TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}* TreeNode(int x, TreeNode *left, TreeNode *right) : val(x), left(left),* right(right) {}* };*/
class Solution {
public:// 计算最大链和的时候顺便更新答案// 在当前节点拐弯的最大路径和=左子树最大链和+右子树最大链和+当前节点值int ans = INT_MIN;int dfs(TreeNode* node) {if (node == nullptr) {return 0;}int lSum = dfs(node->left);int rSum = dfs(node->right);ans = max(ans, lSum + rSum + node->val);return max(max(lSum, rSum) + node->val, 0);}int maxPathSum(TreeNode* root) {dfs(root);return ans;}
};