autodl 上 使用 LLaMA-Factory 微调 中文版 llama3
- 环境准备
- 创建虚拟环境
- 下载微调工具 LLaMA-Factory
- 下载 llama3-8B
- 开始微调
- 测试微调结果
- 模型合并后导出
- vllm 加速推理
环境准备
autodl 服务器:
https://www.autodl.com/console/homepage/personal

基本上充 5 块钱就可以搞完。
强烈建议选 4090(24G),不然微调的显存不够。
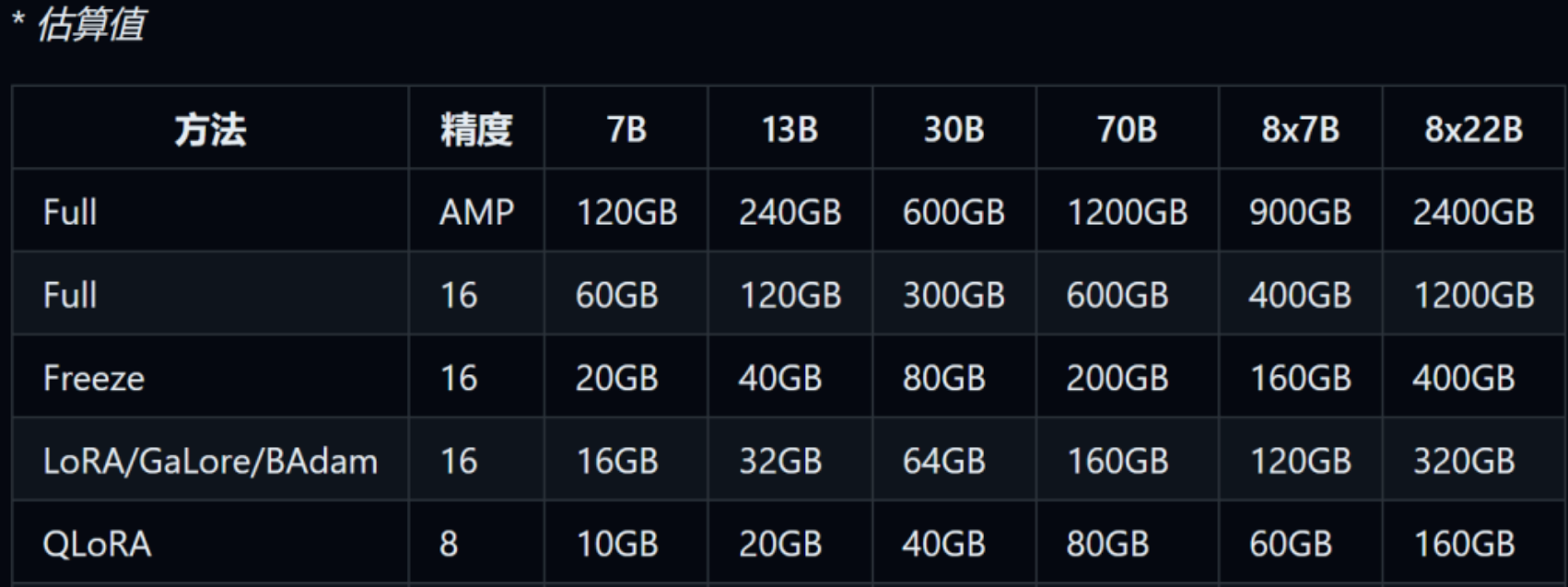
我们用 LoRA 微调,至少得 20G(8B模型)。
微调工具:
- https://github.com/hiyouga/LLaMA-Factory.git
模型:
- https://www.modelscope.cn/LLM-Research/Meta-Llama-3-8B-Instruct.git
创建虚拟环境
conda activate yiyiai
上传中文微调 dpo_zh.json 数据:
- https://www.123pan.com/s/cD4cjv-kvgVh.html
- 提取码: NpsA
下载微调工具 LLaMA-Factory
git clone https://github.com/hiyouga/LLaMA-Factory.gitcd LLaMA-Factory pip install -e .[metrics] # 下载全部依赖
下载 llama3-8B
# pip install modelscope
import torch
from modelscope import snapshot_download, AutoModel, AutoTokenizer
import osmodel_dir = snapshot_download('LLM-Research/Meta-Llama-3-8B-Instruct', cache_dir='/root/autodl-tmp', revision='master')

模型路径:/root/autodl-tmp/LLM-Research/Meta-Llama-3-8B-Instruct
在 LLaMA-Factory/data 文件夹下找到 dataset_info.json 。
方法一:设置镜像站

这个数据,ta会去hf官方找,我们可以设置镜像站。
export HF_ENDPOINT=https://hf-mirror.com/
方法二:改成本地文件路径

俩个地方都要改:file_name、本地数据集路径。
更新 transformers 库:
pip install --upgrade transformers
开始微调
CUDA_VISIBLE_DEVICES=0 llamafactory-cli train \--stage orpo \--do_train True \--model_name_or_path /root/autodl-tmp/LLM-Research/Meta-Llama-3-8B-Instruct \--finetuning_type lora \--template default \--flash_attn auto \--dataset_dir LLaMA-Factory/data\--dataset dpo_mix_zh \--cutoff_len 1024 \--learning_rate 1e-05 \--num_train_epochs 5.0 \--max_samples 1 \--per_device_train_batch_size 1 \--gradient_accumulation_steps 8 \--lr_scheduler_type cosine \--max_grad_norm 1.0 \--logging_steps 5 \--save_steps 100 \--warmup_steps 0 \--optim adamw_torch \--report_to none \--output_dir saves/LLaMA3-8B/lora/train_2024-04-25-07-48-56 \--fp16 True \--lora_rank 8 \--lora_alpha 16 \--lora_dropout 0 \--lora_target q_proj,v_proj \--orpo_beta 0.1 \--plot_loss True

微调后,就找这个路径看一下。
微调上面的参数是自定义的:
- max_samples 1 只使用一个数据微调,一般越多越好,这步为演示,就1条了
stage 当前训练的阶段,枚举值,有“sft”,"pt","rw","ppo"等,代表了训练的不同阶段,这里我们是有监督指令微调,所以是sft
do_train 是否是训练模式
dataset 使用的数据集列表,所有字段都需要按上文在data_info.json里注册,多个数据集用","分隔
dataset_dir 数据集所在目录,这里是 data,也就是项目自带的data目录
finetuning_type 微调训练的类型,枚举值,有"lora","full","freeze"等,这里使用lora
lora_target 如果finetuning_type是lora,那训练的参数目标的定义,这个不同模型不同,请到https://github.com/hiyouga/LLaMA-Factory/tree/main?tab=readme-ov-file#supported-models 获取 不同模型的 可支持module, 比如llama3 默认是 q_proj,v_proj
output_dir 训练结果保存的位置
cutoff_len 训练数据集的长度截断
per_device_train_batch_size 每个设备上的batch size,最小是1,如果GPU 显存够大,可以适当增加
fp16 使用半精度混合精度训练
max_samples 每个数据集采样多少数据
val_size 随机从数据集中抽取多少比例的数据作为验证集
测试微调结果
微调后,还可以马上测试微调结果。
- 调不好!重新调整参数和数据。
- 调得好!马上合并权重。
训练完后就可以在设置的output_dir下看到:
-
adapter开头的就是 LoRA 保存的结果了,后续用于模型推理融合
-
training_loss 和trainer_log等记录了训练的过程指标
-
其他是训练当时各种参数的备份
模型合并后导出
如果想把训练的LoRA和原始的大模型进行融合,输出一个完整的模型文件的话:
CUDA_VISIBLE_DEVICES=0 llamafactory-cli export \--model_name_or_path /root/autodl-tmp/LLM-Research/Meta-Llama-3-8B-Instruct \--adapter_name_or_path ./saves/LLaMA3-8B/lora/sft \--template llama3 \--finetuning_type lora \--export_dir megred-model-path \--export_size 2 \--export_device cpu \--export_legacy_format False
vllm 加速推理
需要提前将LoRA 模型进行merge,使用merge后的完整版模型目录:
CUDA_VISIBLE_DEVICES=0 API_PORT=8000 llamafactory-cli api \--model_name_or_path megred-model-path \--template llama3 \--infer_backend vllm \--vllm_enforce_eager