控制器搭建与参数整定
- 搭建一个前馈PID控制器控制系统
- PID tuner使用
一个懂点控制但不多的小白,因为需要利用simulink仿真,所以不得不学习一些仿真的知识,这篇文章适合和我一样的新手入门,有理解错误的地方希望大手们能够指出来共同学习。
搭建一个前馈PID控制器控制系统
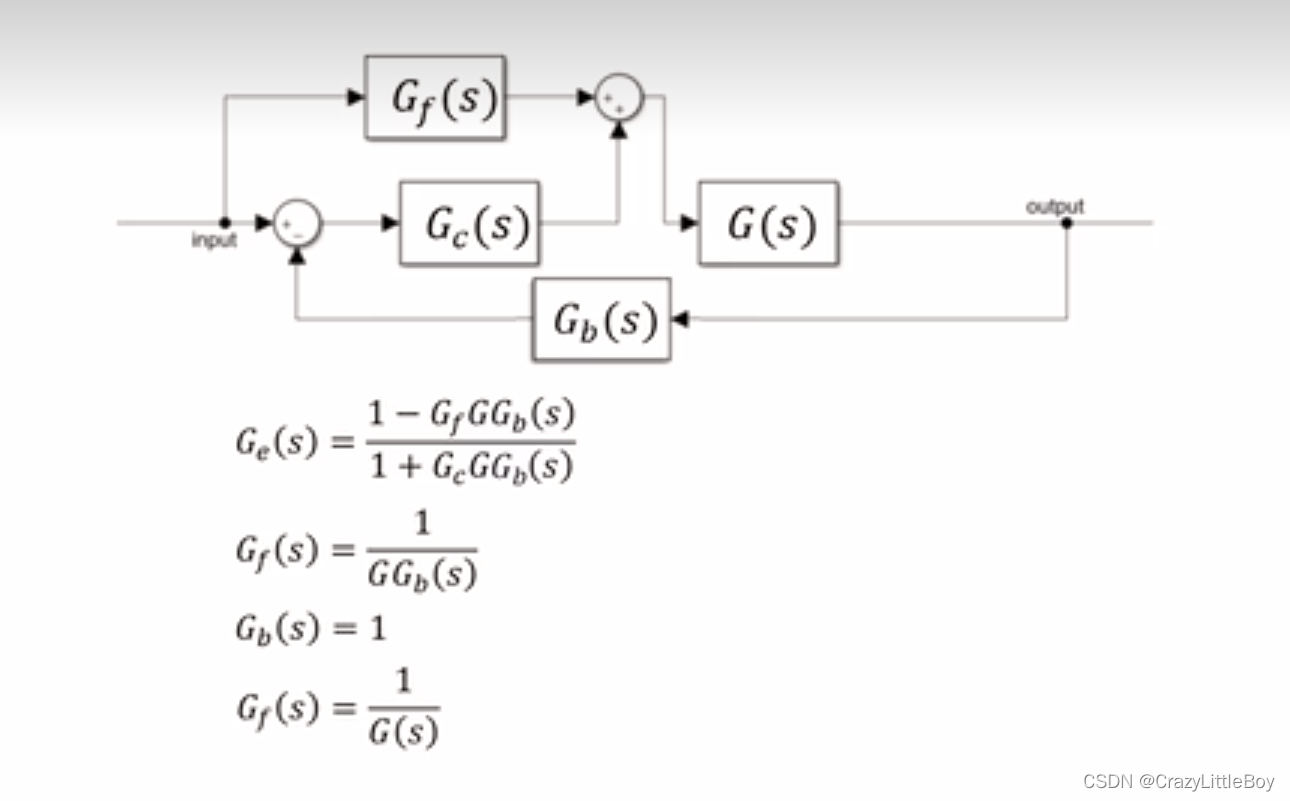 控制框图
控制框图
这里边有几点我简单的记录一下:
1.通常我们的被控对象,我们应该是最先得到它的时域下的数学模型,由于需要验证这个模型的响应,所以需要仿真,我猜测应该也可以直接仿真,但是具体为什么要转成S函数,10多年前学得了,已经记不清,似乎是为了方便分析模型的数学特性;
2.将数学模型转成s函数,需要s变换,也叫拉普拉斯变换,在matlab中用laplace()函数可求解得到对应的G(s);
3.s代表原函数的一阶微分,s^2代表二阶微分也就是二阶导数;
4.假如G(s)=k/(Ts +1)时,根据图片,前馈函数Gf(s)=T/k*s+1/k,在simulink中搭建的时候,可以用Δu/Δt表示s,就变成了一个比例加上一个微分了,所以这个时候前馈补偿有点像PD控制器;
5.编写控制器程序的时候,单片机都是基于晶振工作的,所以都是在时域下运行的,那么根据仿真得到控制器都是S函数,这个时候就用matlab中的ilaplace()反变换函数,变换到时域下,就可以把公式写到程序里了;
6.对于输入信号,我们知道G(s)=Y(s)/U(s),所以输入肯定也是要进行s变换的,如果输入是个随时间变化的函数就要做随便,如果原来时域下的输入是离散的常数值,就用阶跃信号表示,如果是区间内随机产生的,就用对应的模块。这里引用一句话。
常数的拉普拉斯变换是A/s,其中A是常数。这是因为在拉普拉斯变换中,常数被视为阶跃信号,其值为A,其拉普拉斯变换结果为A/s。
7.PID在编程的时候的表示方法,有两种:
位置式PID:
pwm=Kpe(k)+Ki∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,k;
pwm代表输出
增量式离散PID公式:
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
pwm代表增量输出
PID tuner使用
1.搭建好一个控制框图

2。确定好PID控制器的输入以及被控对象的输出,主要确定数据流对应的线条
3.打开控制系统整定
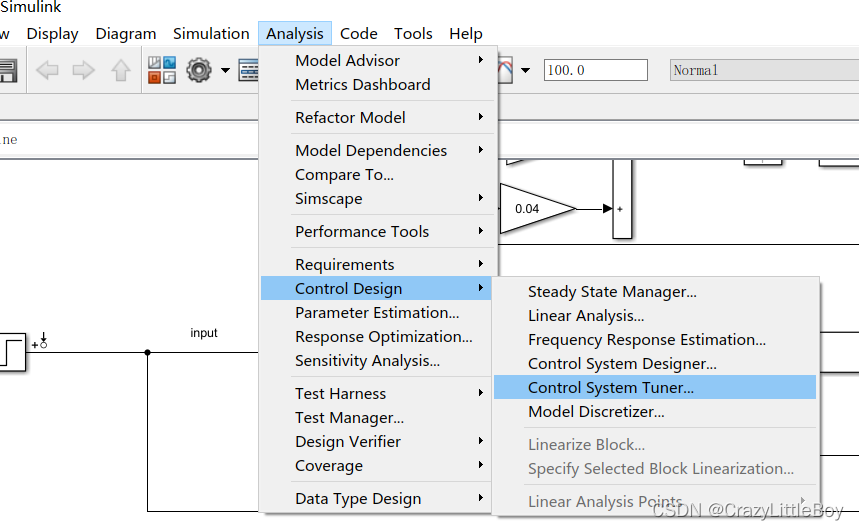
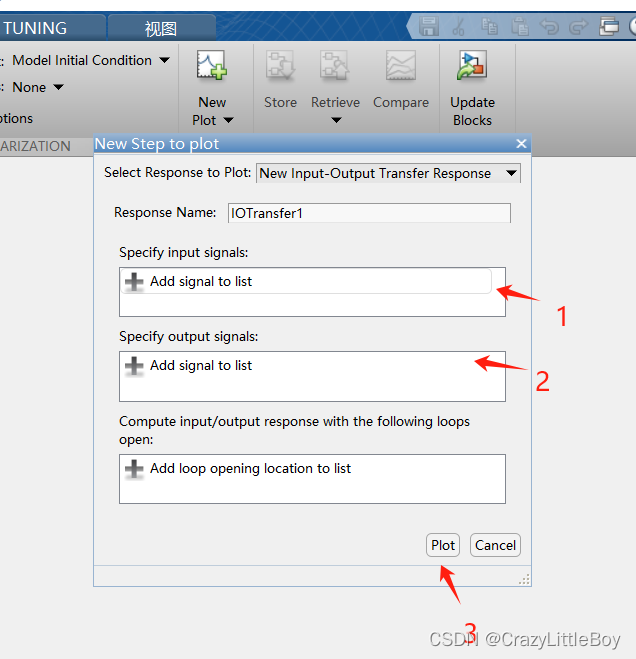
4.找到new step 因为我们接下来输入的信号是阶跃信号,如果不是,就更换别的信号图

5.然后选择刚才选定的输入信号对应的线条,输出信号对应的线条,然后plot,得到默认的调整输出曲线
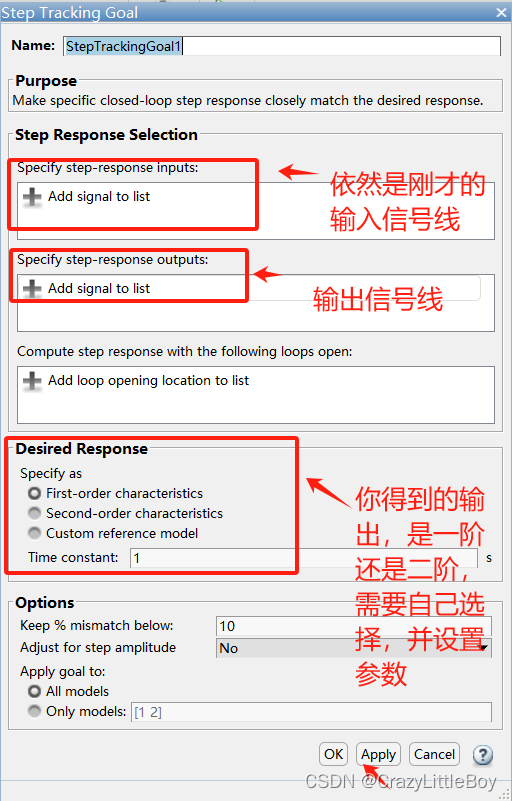
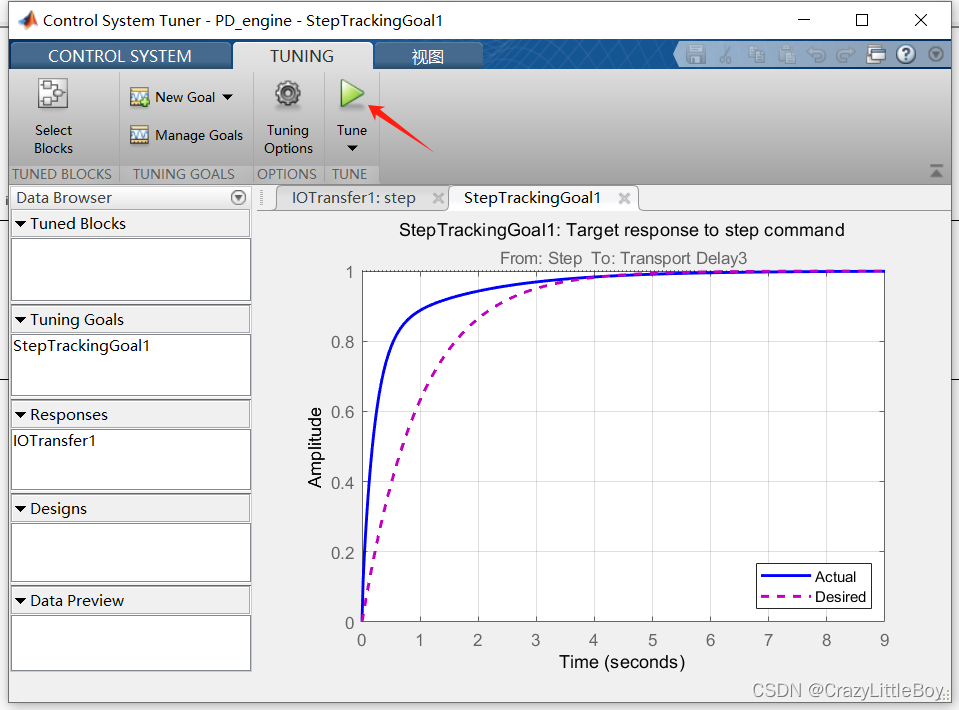
6.找到跟踪阶跃信号

7.配置期望输出响应曲线的参数
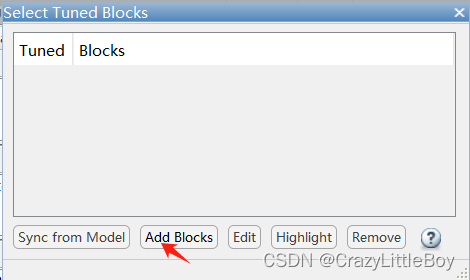
8、选择需要整定的模块
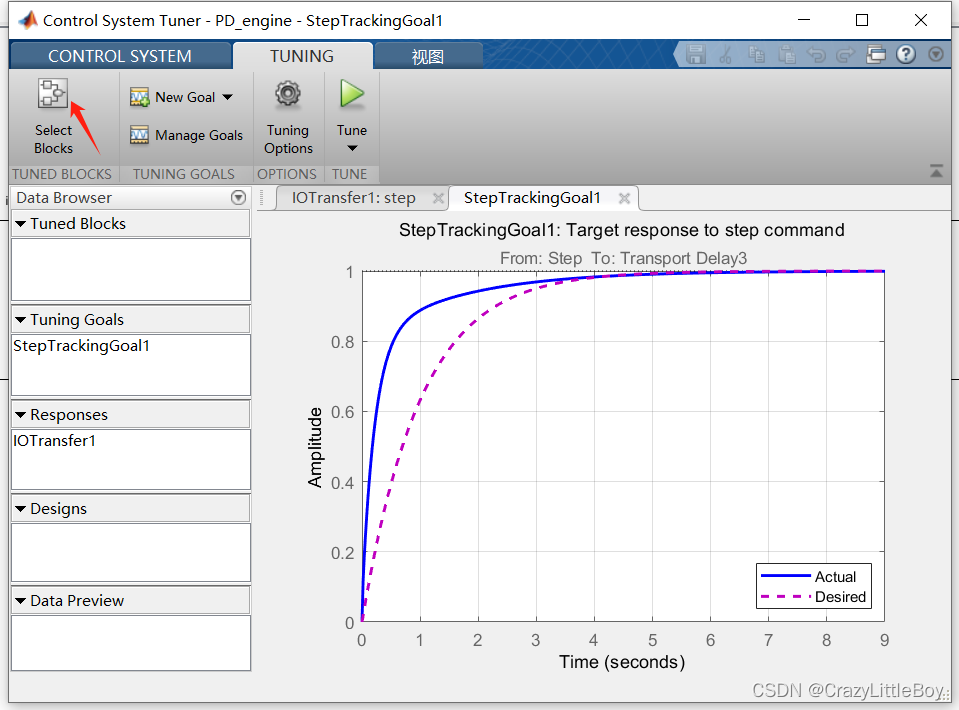

9.根据配置运行整定,PID模块中的参数
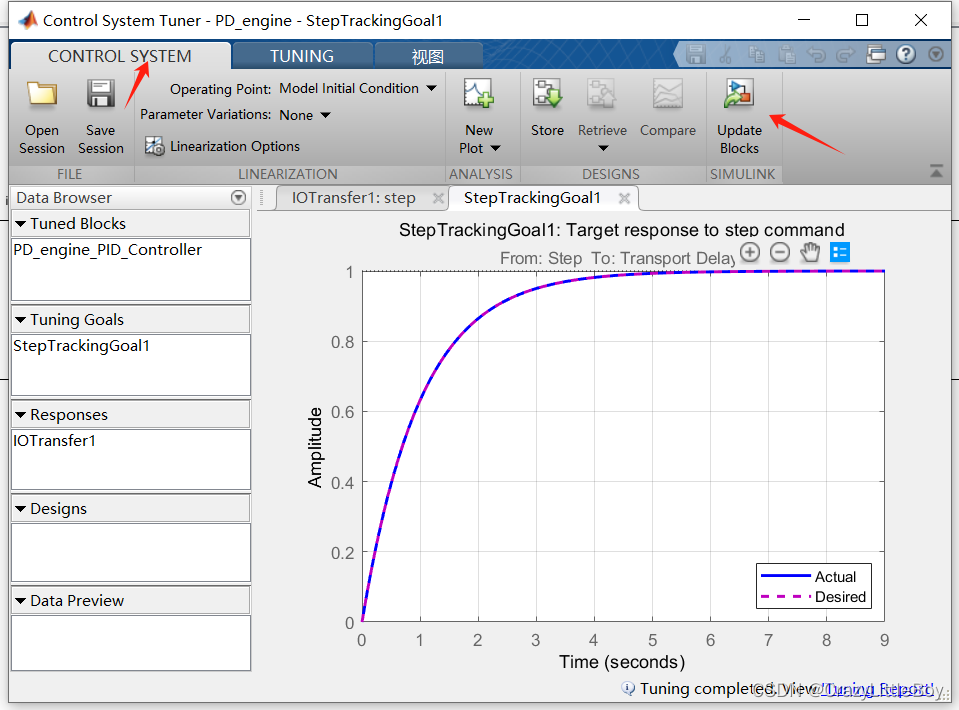
10.将整定得到的参数更新到simulink中对应的模块中
11.自整定完了,根据感受,除非很清晰的知道输出是什么样的,否则得到的参数还是需要手动调整。
经过试验,前馈+PID 比 PID提升响应速度上更快,实时性更好。


![[算法][BFS][leetcode]994. 腐烂的橘子](https://img-blog.csdnimg.cn/img_convert/fc6c72b59f50a341de65df1abc3980b4.png)