观前提醒:本博客介绍如何使用Python订阅ROS话题,并将接收到的消息保存到SQL数据库中,包括MySQL和SQL Server两种情况。
使用Python订阅ROS话题并将消息保存至MySQL数据库
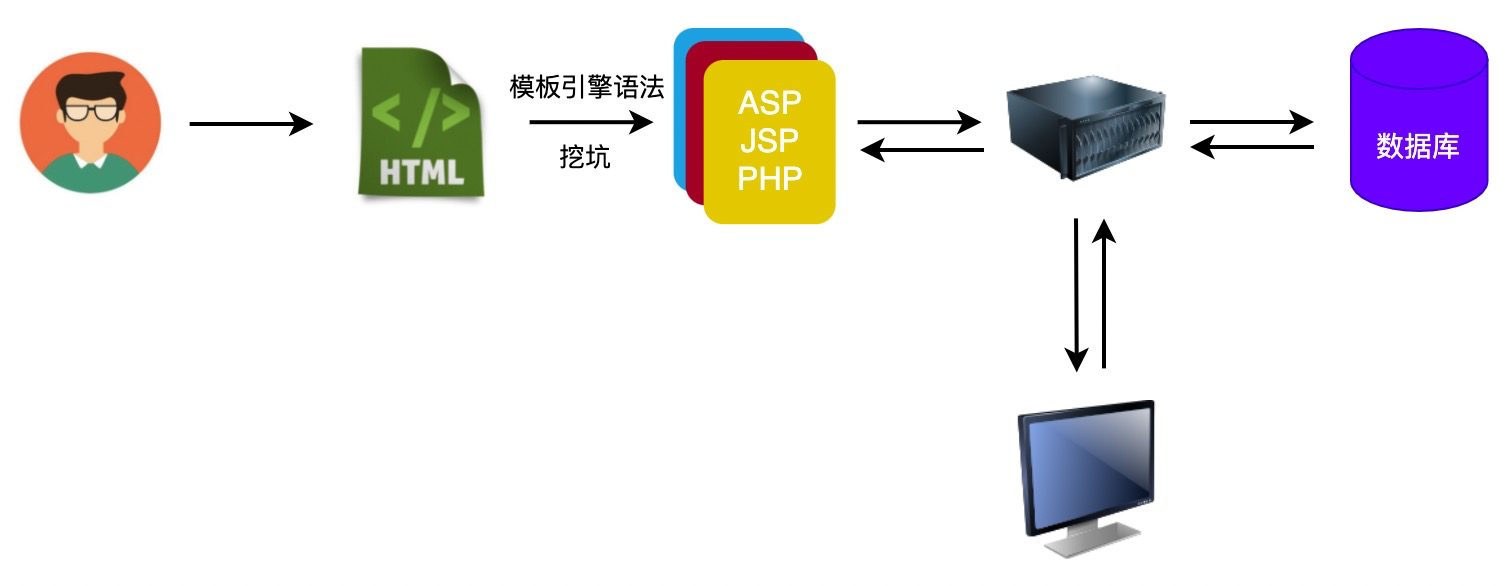
下面我们将详细介绍如何使用Python订阅ROS话题,并将接收的数据保存到MySQL数据库中。这种技术可以用于机器人数据的记录、分析和回放。
第一步:安装Python依赖库
我们将使用rospy来订阅ROS话题,以及mysql-connector-python来连接MySQL数据库。在你的Python环境中,使用以下命令来安装这些库:
pip install mysql-connector-python注意:rospy通常作为ROS的一部分而已经安装,因此不需要单独安装。
第二步:配置MySQL数据库
在MySQL中,你需要创建一个新的数据库和表来存储从ROS话题收到的消息。
- 登录到MySQL服务器。
- 创建一个新数据库:CREATE DATABASE ros_messages;
- 选择数据库:USE ros_messages;
- 创建一个表来存储消息:
CREATE TABLE sensor_messages ( id INT AUTO_INCREMENT PRIMARY KEY, topic VARCHAR(100), message TEXT, received_at TIMESTAMP DEFAULT CURRENT_TIMESTAMP);这将创建一个名为sensor_messages的表,其中包括id,topic,message和received_at字段。
第三步:编写Python脚本
现在,我们来编写Python脚本来订阅ROS话题,并将收到的消息保存到MySQL数据库中。
导入必要的模块
import rospyfrom std_msgs.msg import Stringimport mysql.connectorfrom mysql.connector import Error这里我们导入了rospy模块来订阅ROS话题,std_msgs.msg中的String用于指定消息类型,以及mysql.connector来管理MySQL数据库连接。
建立数据库连接
def create_db_connection(): try: connection = mysql.connector.connect( host='localhost', database='ros_messages', user='your_username', password='your_password' ) return connection except Error as e: print(e) return Nonecreate_db_connection函数尝试连接到MySQL数据库,并在失败时打印错误。
定义消息处理函数
def handle_sensor_message(data): db_connection = create_db_connection() if db_connection is not None: cursor = db_connection.cursor() sql_insert_query = """ INSERT INTO sensor_messages (topic, message) VALUES (%s, %s) """ cursor.execute(sql_insert_query, ('/sensor_topic', data.data)) db_connection.commit() cursor.close() db_connection.close()handle_sensor_message是一个回调函数,用来处理接收到的消息。它将连接到数据库,插入新的消息记录,然后关闭数据库连接。
初始化ROS节点并订阅话题
def main(): rospy.init_node('sensor_message_saver', anonymous=True) rospy.Subscriber('/sensor_topic', String, handle_sensor_message) rospy.spin()main函数初始化ROS节点,订阅名为/sensor_topic的话题,并注册了handle_sensor_message作为回调函数。rospy.spin()使得脚本保持运行并等待消息的到来。
第四步:运行一下吧
将上述代码保存为sensor_message_saver.py。确保ROScore和MySQL服务正在运行后,执行以下命令来启动脚本:
python sensor_message_saver.py现在,每当有新消息发布到/sensor_topic话题时,你的脚本就会将这些消息保存到MySQL数据库中。
话题发送
我们使用一个py发送话题
点击从ROS到数据库:用Python将ROS话题消息保存到数据库 - 古月居可查看全文