一、Maintain NMC RPO Sequence
Maintain Natural Motion Circumnavigation RPO序列在目标星和追踪星经历不同的力的情况下保持NMC。通常这种差异是由于阻力和太阳光压造成的。这些是主要不同力当执行接近任务的时候,因为重力和相对三体摄动力非常小当相对距离在100km以内的时候。
目标卫星和追逐卫星之间的阻力和SRP差异很大程度上是由于不同的尺寸、面积、质量和形状。要有效地使用此序列,必须在正确的位置使用Update_Spacecraft_parameters序列,特别注意这些参数。
维持NMC序列利用参考卫星创建NMC,该NMC具有与目标匹配的力模型。追逐卫星具有不同的航天器参数(面积、质量、大小和形状),导致NMC偏离参考NMC。这需要保持位置操纵以保持在所需的NMC上。
在这个序列,你能够指定位置Natural Motion Circumnavigation的时间,对于期望NMC的最大误差。从这些输入,这个序列计算所有需要的Delta-V来维持从理想绕飞的最大误差。
下面两个照片展示了保持自然环绕导航在一圈5m的最大误差内。在GEO的例子中,这个Delta-V序列100%Cr的区别是接近于1cm/sec一圈,下面照片展示了如果没有轨位保持的机动,NMC将会如何进行



二、Natural Motion Circumnavigation RPO Sequence
Natural Motion Circumnavigation RPO序列产生初始的情况对于一次绕飞。这个序列将追逐卫星从当前位置移动到NMC的起点。它通过一组前置运动路点来实现这一点,默认情况下,该路点沿着当前相对位置和NMC起始位置的路径以接近直线的方式移动追踪。如果您更喜欢简单的跃点而不是一系列路点。则将Way_MaxDegrees参数设置为一个最大值(>180deg)
在NMC中的自由度,包括size orientation,translation。您可以更改这些参数以实现许多不同的NMC配置。该序列将状态返回到NMC的开始,您可以在该序列之后添加Coast(很少或没有差动力)或者Maintain NMC Sequence

对于特殊情况“等距NMC”——NMC与目标接近一个近似恒定的距离,选择RBar_CrossTrack_Offset是半长轴的倍。于是VBar_CrossTrack_Offset,InTrack_Offset,和InTrack_Drift均设置为0.在这种情况下,NMC的结果大约是目标的恒定值,这个距离大概是半长轴的两倍。同时,对于这种情况,NMC经过VBar。
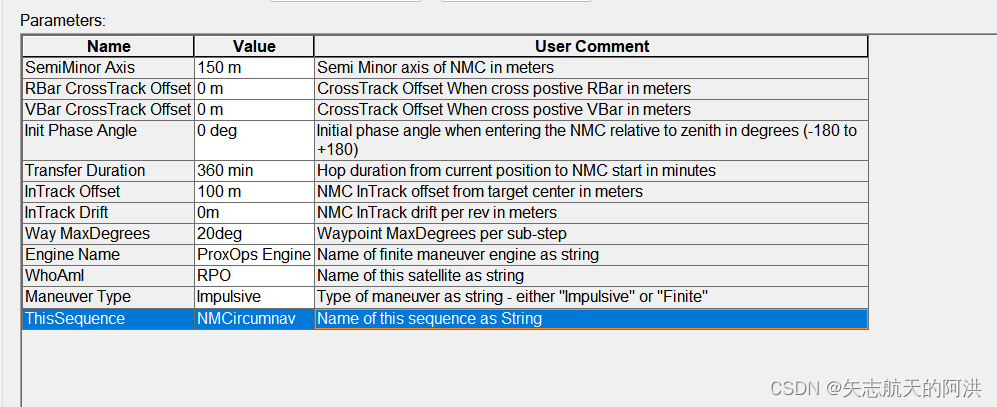
SemiMinor-Axis:输入NMC的尺寸
RBar_CrossTrack_Offset:输入NMC与+RBar交叉时的交叉轨道偏移距离(下图是100m)

VBar_CrossTrack_Offset:输入NMC与+VBar交叉轨道偏移距离(下图是100m)

Init_Phase_Angle:初始相位角,下图1为0deg,图2为80


InTrack_Offset:输入沿迹向偏差,下图为80m

InTrack_Drift:沿迹向的漂移率,下图为100m

Way_MaxDegrees:输入最大航天器的度数在强迫绕飞点的之间,下图是20°