同步FIFO(synchronous)的写时钟和读时钟为同一个时钟,FIFO内部所有逻辑都是同步逻辑,常常用于交互数据缓冲。
异步FIFO:数据写入FIFO的时钟和数据读出FIFO的时钟是异步的(asynchronous)
典型同步FIFO有三部分组成:
(1) FIFO写控制逻辑;
(2)FIFO读控制逻辑;
(3)FIFO 存储实体(如Memory、Reg)。
FIFO写控制逻辑主要功能:产生FIFO写地址、写有效信号,同时产生FIFO写 满、写错等状态信号;
FIFO读控制逻辑主要功能:产生FIFO读地址、读有效信号,同时产生FIFO读 空、读错等状态信号。
-
基本概念
FIFO:先进先出(First-in-first-out) FIFO的深度 同一块数据内存的大小
FIFO的宽度:写指针:
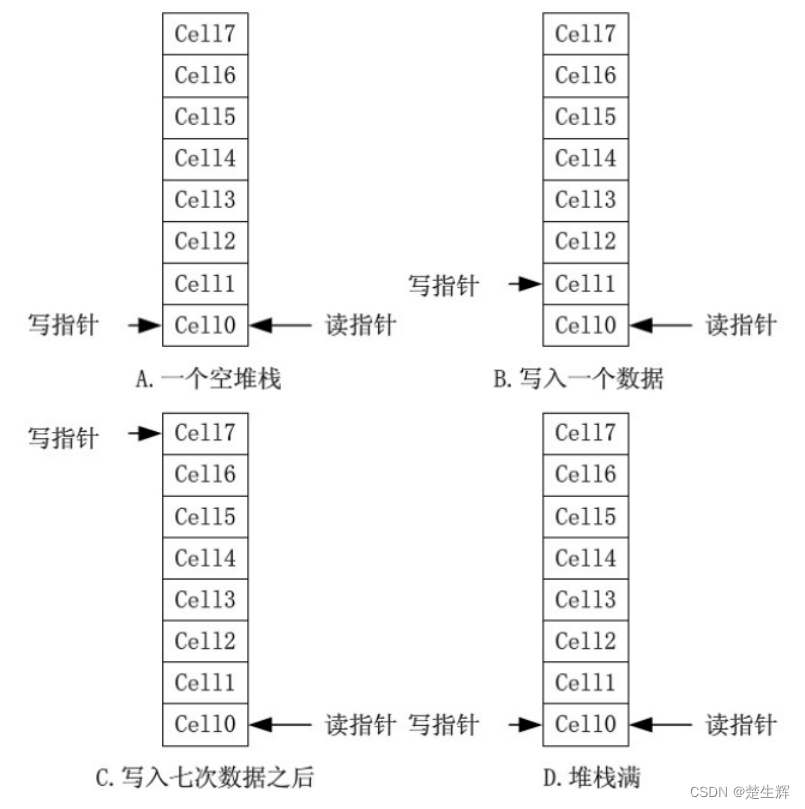
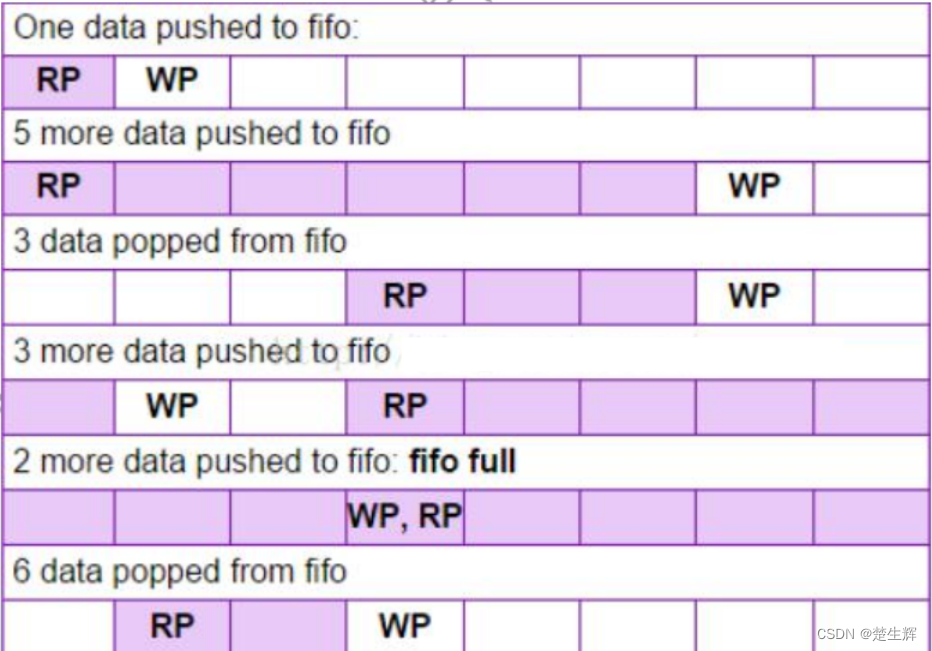
Write-pointer读指针:Read-pointer一般FIFO使用循环指针(计数溢出自动归零)。一般可以称写指针为头head,读指针为尾tail。 初始化时,读写指针指向同一数据地址。下图可见,FIFO初始化时,WP和RP指针指向同一数据单元。WP指向下一个将要写入的数据单元,RP指向将要读出的数据单元
2种方法判断空满:
-
counter计数器:判断有效数据是否等于FIFO的深度,为0就表示空
使用fifo_counter记录FIFO RAM中的数据个数,等于0时,给出empty信号,等于BUF_LENGTH时,给出full信号。
写而未满时增加1 读而未空时减1 同时发生读写操作时,fifo_counter不变
-
pointer:如果深度为8,那么3bit就可以表示8个数,但是为了判断空满,会多定义一位,也即4bit,WP为1000,RP为0000,我们使用最高位去判断是否在同一单元,用高位判断空满,如果高位相异,就表示满,如果相同表示空。
-
-
程序代码
`define BUF_WIDTH 4 // 地址宽度为3+1, `define BUF_SIZE 8 // 数据个数,FIFO深度 module fifo_counter( clk,rst_n,buf_in,buf_out,wr_en,rd_en,buf_empty,buf_full,fifo_cnt);input clk,rst_n; // 时钟与复位信号input wr_en,rd_en; // 读写使能信号input [7:0] buf_in; // 写数据output reg [7:0] buf_out; // 读数据output wire buf_empty,buf_full; // 空满两个状态信号output reg [`BUF_WIDTH-1:0] fifo_cnt; //判断空满计数器// 读写指针:数据指针3位宽度,0-7索引,8个数据深度,循环指针0-7-0-7reg [`BUF_WIDTH-2:0] rd_ptr,wr_ptr;// 读写容器reg [7:0] buf_mem[0:`BUF_SIZE-1];//判断空满 方式1assign buf_empty = (fifo_cnt == 0); //buf_empty若是reg类型则错,不能使用assign持续赋值assign buf_full = (fifo_cnt == `BUF_SIZE);// fifo_cnt = 8就是满的//判断空满 方式2assign buf_empty = (rd_ptr[3] == wr_ptr[3])&&(rd_ptr[2:0] == wr_ptr[2:0]); assign buf_full = (rd_ptr[3] != wr_ptr[3])&&(rd_ptr[2:0] == wr_ptr[2:0]); // 前后必须同时为1//读数据always @(posedge clk or negedge rst_n) begin if(!rst_n)buf_out <= 0;if(rd_en && !buf_empty)buf_out <= buf_mem[rd_ptr];end// 写数据always @(posedge clk) beginif(wr_en && !buf_full)buf_mem[wr_ptr] <= buf_in;end// 更改读写指针always @(posedge clk or negedge rst_n)beginif(!rst_n)beginwr_ptr <= 0;rd_ptr <= 0;endelse begin// 满足写的条件,就把写指针+1if(!buf_full && wr_en)wr_ptr <= wr_ptr + 1;// 满足读的条件,就把读指针+1if(!buf_empty && rd_en)rd_ptr <= rd_ptr + 1;endend// 监控fifo_cntalways @(posedge clk or negedge rst_n)beginif(!rst_n)fifo_cnt <= 0;else if((!buf_full&&wr_en)&&(!buf_empty&&rd_en)) // 同时读写,数量不变fifo_cnt <= fifo_cnt;else if(!buf_full && wr_en) // 写数据:写而未满增加1fifo_cnt <= fifo_cnt + 1;else if(!buf_empty && rd_en) // 读数据:读而未空减1fifo_cnt <= fifo_cnt-1;elsefifo_cnt <= fifo_cnt; // 维持end endmodule -
TestBench
`define BUF_WIDTH 4 //地址宽度为3+1, `define BUF_SIZE (8) //数据个数,FIFO深度 module tb_fifo_counter;reg clk,rst_n;reg wr_en,rd_en;reg [7:0] buf_in; // data input to be pushed to bufferwire [7:0] buf_out; // port to output the data using pop. wire buf_empty,buf_full; // buffer empty and full indicationwire [`BUF_WIDTH-1:0] fifo_cnt; // number of data pushed in to bufferfifo_counter dut(.clk(clk),.rst_n(rst_n),.buf_in(buf_in),.buf_out(buf_out),.wr_en(wr_en),.rd_en(rd_en),.buf_empty(buf_empty),.buf_full(buf_full),.fifo_cnt(fifo_cnt));fifo_counter dut(.clk (clk),.rst_n (rst_n),.buf_in (buf_in),.buf_out (buf_out),.wr_en (wr_en),.rd_en (rd_en),.buf_empty (buf_empty),.buf_full (buf_full),.fifo_cnt (fifo_cnt));always #10 clk = ~clk;// 定义一个临时的数据,将读出来的数据暂存reg [7:0] tempdata;initial beginclk = 0;rst_n = 0;wr_en = 0;rd_en = 0;buf_in = 0;#15; rst_n = 1;push(1);// 同时读写forkpush(2);pop(tempdata); // 读取tempdata = 1joinpush(10);push(20);push(30);push(40);push(50);push(60);push(70);// 70push 就会满push(80);push(90);push(100);push(110);push(120);push(130);pop(tempdata); // 读取tempdata = 2push(tempdata); pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);push(140); // 可以写进去pop(tempdata);push(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);pop(tempdata);push(5);pop(tempdata);// 读取tempdata = 5#50 $finish;end// 将data写入fifotask push (input [7:0] data);if(buf_full)$display("---Cannot push %d: Buffer Full---",data);else begin$display("Push",,data);buf_in = data;wr_en = 1;@(posedge clk);#5 wr_en = 0;endendtask// 将data读取出来task pop(output[7:0] data);if(buf_empty)$display("---Cannot Pop: Buffer Empty---");else beginrd_en = 1;@(posedge clk);#3 rd_en = 0;data = buf_out;$display("------Poped:",,data);endendtask endmodulefind -name "*.v" > file.listmakefile文件:
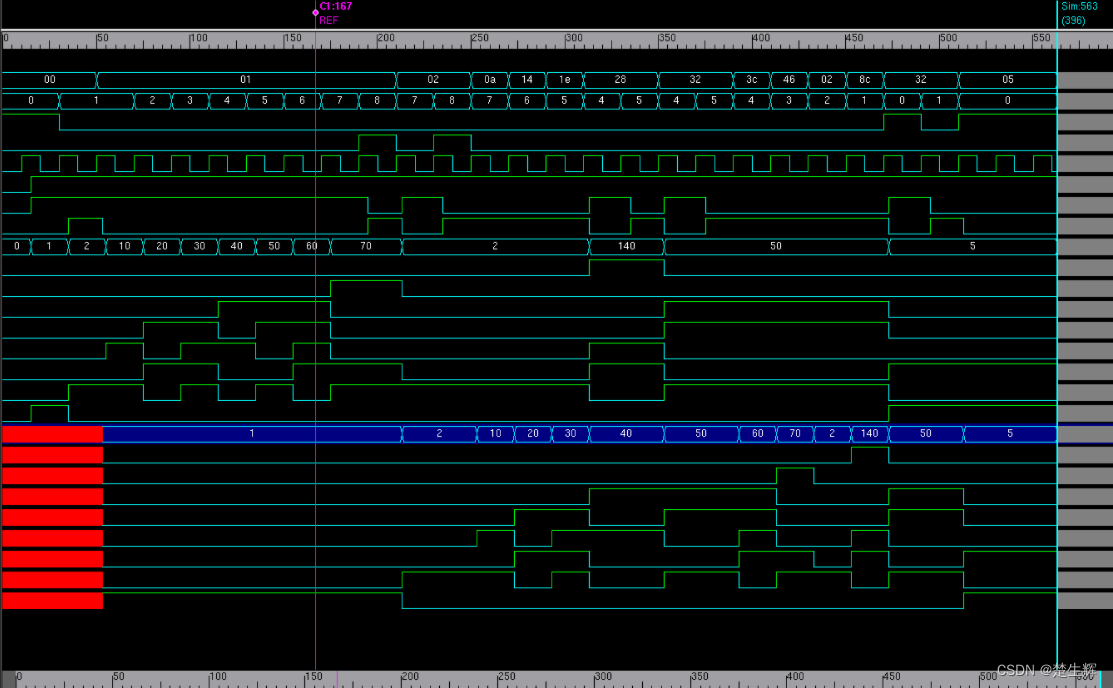
all:clean com sim SEED=1 com:vcs -full64 -R -sverilog -debug_all -f file.list -l comp.log +ntb_random_seed=$(SEED) \-cm line+cond+fsm+branch+tgl -cm_name simv -cm_dir ./covdir.vdb sim:./simv -l sim.log rung:./simv -gui -l sim.log cov:dve -full64 -covdir *.vdb & clean:rm -rf ./csrc *.daidir *.log *.vpd *.vdb simv* *.key *race.out*rm -rf AN.DBrm -rf novas*rm -rf DVEfilesrm -rf urgReportVCS Coverage Metrics Release O-2018.09-1_Full64 Copyright (c) 1991-2018 by Synopsys Inc. Push 1 Push 2 ------Poped: 1 Push 10 Push 20 Push 30 Push 40 Push 50 Push 60 Push 70 ---Cannot push 80: Buffer Full--- ---Cannot push 90: Buffer Full--- ---Cannot push 100: Buffer Full--- ---Cannot push 110: Buffer Full--- ---Cannot push 120: Buffer Full--- ---Cannot push 130: Buffer Full--- ------Poped: 2 Push 2 ------Poped: 10 ------Poped: 20 ------Poped: 30 ------Poped: 40 Push 140 ------Poped: 50 Push 50 ------Poped: 60 ------Poped: 70 ------Poped: 2 ------Poped: 140 ------Poped: 50 ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- ---Cannot Pop: Buffer Empty--- Push 5 ------Poped: 5查看波形:
make rung