
读人工智能全传07智能体
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/740936.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
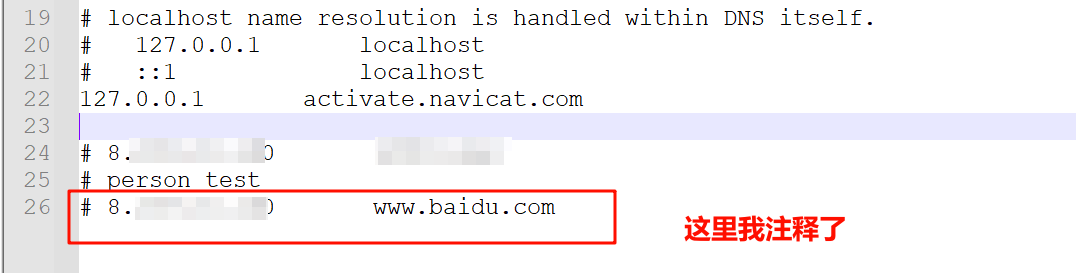
修改hosts文件不生效原因
hosts文件目录C:\Windows\System32\drivers\etc解决方法
重启浏览器。
其它参考:https://blog.csdn.net/zx1323/article/details/127461529本文来自博客园,作者:__username,转载请注明原文链接:https://www.cnblogs.com/code3/p/18290996

计一次Win32 api程序显示混乱问题的调试经历
背景:短学期任务,做一个his系统,老师是没有要求gui的,我闲的没事干就打算写一个gui,但是mfc、qt、unity每一个熟悉的,所以就直接用了win32 api手写gui~~(我太难了,我发誓以后再也不手写gui了)~~。然后我就想到了子窗口切换的方式来显示不同的界面(好处在于,每个子界…
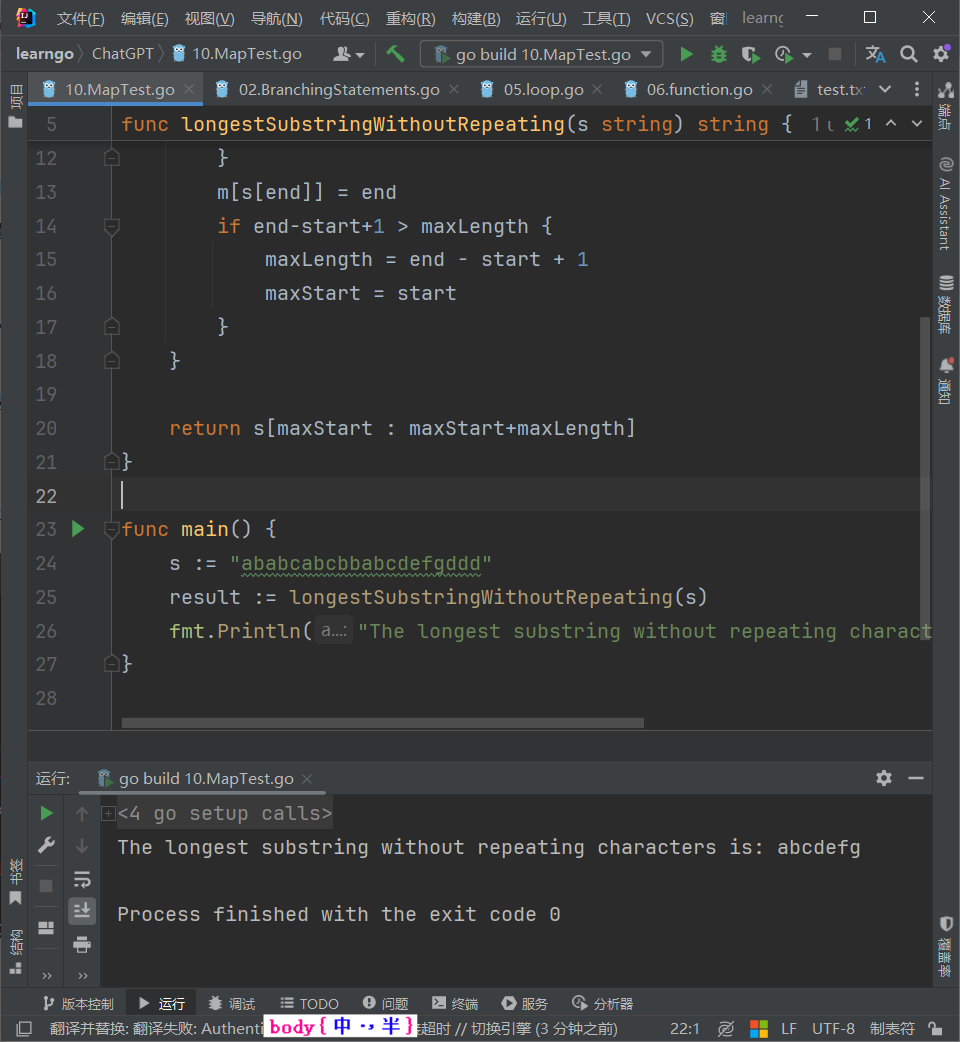
05.Map 案例 滑动区间算法
下面是 Go 语言实现寻找最长不含有重复字符的子串的代码:滑动区间算法??package mainimport "fmt"func longestSubstringWithoutRepeating(s string) string {m := make(map[byte]int)start, maxLength, maxStart := 0, 0, 0for end := 0; end < len(s); end++…

全网最适合入门的面向对象编程教程:11 类和对象的Python实现-子类调用父类方法-模拟串口传感器和主机
本节课,我们主要讲解了在Python类的继承中子类如何进行初始化、调用父类的属性和方法,同时讲解了模拟串口传感器和主机类的具体实现,并使用xcom串口助手与两个类进行串口通信使用。全网最适合入门的面向对象编程教程:11 类和对象的 Python 实现-子类调用父类方法-模拟串口传…

Vite5+Electron聊天室|electron31跨平台仿微信EXE客户端|vue3聊天程序
基于electron31+vite5+pinia2跨端仿微信Exe聊天应用ViteElectronChat。
electron31-vite5-chat原创研发vite5+electron31+pinia2+element-plus跨平台实战仿微信客户端聊天应用。实现了聊天、联系人、收藏、朋友圈/短视频等模块。支持electron多开窗口管理、壁纸皮肤、自定义最大…

![[Code Composer Studio] Memory Browser保存数据](https://img2024.cnblogs.com/blog/1324435/202407/1324435-20240709004848758-567373840.png)
[Code Composer Studio] Memory Browser保存数据
造冰箱的大熊猫,适用于Code Composer Studio v5.5@cnblogs 2024/7/91、使用CCS>>View>>Memory Browser,可对目标板上的存储空间进行读写操作
2、要保存数据,在Memory Browser内,点击鼠标右键,在弹出的菜单中选择Save Memory
3、在Save Memory对话框中,在Fi…
![[LeetCode] 135. Candy](https://img2024.cnblogs.com/blog/747577/202407/747577-20240709003602446-16034267.png)
[LeetCode] 135. Candy
和 238. Product of Array Except Self 计算除自己之外的乘积很像,先左侧遍历,再右侧遍历。
Hard不过如此。
class Solution:def candy(self, ratings: List[int]) -> int:# 1n = len(ratings)if n == 1:return 1# min element is not existif all(x == ratings[0] for x …


一台 3000 元战未来主机装配方案
为了更好的阅读体验,请点击这里
下面是一个备选方案:
CPU:酷睿I3 12100 四核八线程649
主板:微星H610M 爆破弹 金牌 569
内存:金百达16G 8GX2 3200 银爵 229
散热:赛普雷 涂城 双铜管散热器 49
固态:西数SN570 500G M2新蓝盘 249
显卡:UHD 730
电源:航嘉 GS400 好运来…