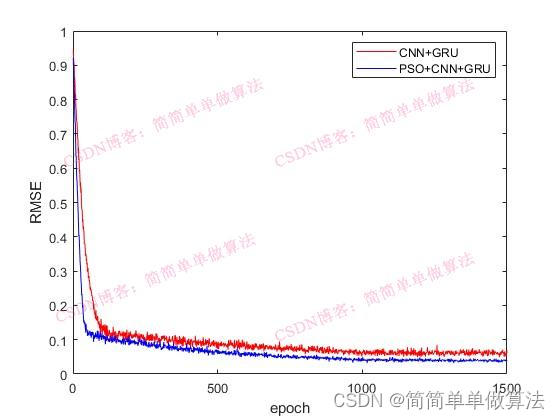
1.算法运行效果图预览
(完整程序运行后无水印)
2.算法运行软件版本
matlab2022a
3.部分核心程序
for i=1:Iterifor j=1:Npeoprng(i+j)if func_obj(x1(j,:))<pbest1(j)p1(j,:) = x1(j,:);%变量pbest1(j) = func_obj(x1(j,:));endif pbest1(j)<gbest1g1 = p1(j,:);%变量gbest1 = pbest1(j);endv1(j,:) = 0.8*v1(j,:)+c1*rand*(p1(j,:)-x1(j,:))+c2*rand*(g1-x1(j,:));x1(j,:) = x1(j,:)+v1(j,:); for k=1:dimsif x1(j,k) >= tmps(2,k)x1(j,k) = tmps(2,k);endif x1(j,k) <= tmps(1,k)x1(j,k) = tmps(1,k);endendfor k=1:dimsif v1(j,k) >= tmps(2,k)/2v1(j,k) = tmps(2,k)/2;endif v1(j,k) <= tmps(1,k)/2v1(j,k) = tmps(1,k)/2;endendendgb1(i)=gbest1 ;
endLR = g1(1);numHiddenUnits1 = floor(g1(2))+1;% 定义隐藏层中LSTM单元的数量
............................................................................
figure
subplot(211);
plot(1: Num1, Tat_train,'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(1: Num1, T_sim1,'g',...'LineWidth',2,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);legend('真实值', '预测值')
xlabel('预测样本')
ylabel('预测结果')
grid onsubplot(212);
plot(1: Num1, Tat_train-T_sim1','-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);xlabel('预测样本')
ylabel('预测误差')
grid on
ylim([-50,50]);
figure
subplot(211);
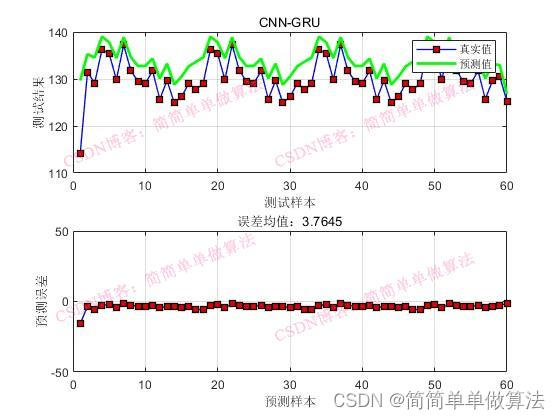
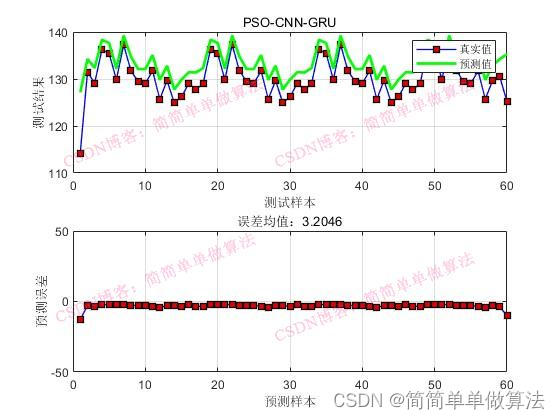
plot(1: Num2, Tat_test,'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(1: Num2, T_sim2,'g',...'LineWidth',2,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
legend('真实值', '预测值')
xlabel('测试样本')
ylabel('测试结果')
grid on
subplot(212);
plot(1: Num2, Tat_test-T_sim2','-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);xlabel('预测样本')
ylabel('预测误差')
grid on
ylim([-50,50]);save R2.mat Num2 Tat_test T_sim2 gb1 Accuracy
4.算法理论概述
基于粒子群优化(Particle Swarm Optimization, PSO)的的CNN-GRU(卷积神经网络-门控循环单元)时间序列回归预测模型,是融合了遗传算法的优化能力和深度学习模型的表达力的一种高级预测框架。该模型通过结合CNN在特征提取上的优势和GRU在处理序列数据中的高效记忆机制,实现了对时间序列数据的深入理解和未来值的精确预测。同时,利用遗传算法对模型超参数进行优化,能够进一步提升模型的预测性能。
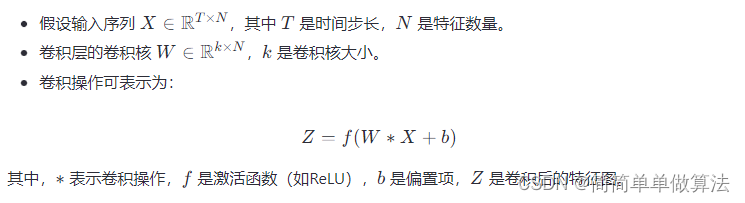
4.1 卷积神经网络(CNN)
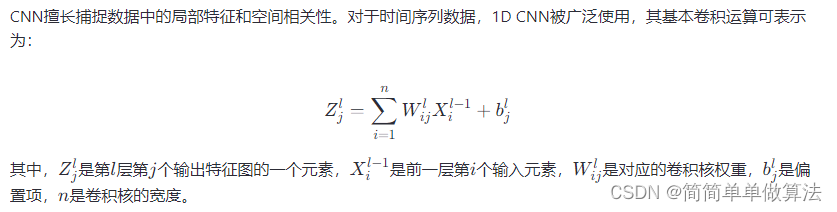
CNN以其在图像识别领域的卓越表现而闻名,但其在时间序列分析中也显示出了强大的潜力。CNN通过局部连接和权值共享减少参数数量,利用卷积层捕获输入数据的空间特征。
4.2 CNN-GRU模型架构
GRU作为LSTM的简化版,同样用于捕获序列中的长期依赖,但具有更少的门控机制.
4.3 CNN-GRU结合PSO的时间序列预测
在时间序列预测任务中,首先使用CNN对输入序列进行特征提取,然后将提取到的特征作为GRU的输入,进一步捕捉序列中的时序依赖关系。整个网络的参数(包括CNN的卷积核权重、GRU的门控参数等)构成了PSO算法的搜索空间。
1.结合PSO的过程:初始化一组粒子,每个粒子代表一组CNN-LSTM模型的参数。
2.对于每个粒子,构建相应的CNN-GRU模型并训练,评估其在验证集上的预测性能(如均方误差MSE)作为适应度函数。
3.根据PSO算法更新粒子的位置和速度,不断寻找更优的模型参数配置。
4.迭代此过程直至满足停止条件(如达到最大迭代次数或找到足够好的解)。