目录
- 最小生成树算法
- prim算法
- 适用范围:无向图
- 思路
- kruskal算法
- 适用范围: 无向图
- 思路
- prim算法
最小生成树算法
prim算法
适用范围:无向图
思路
以将所有点归入最小生成树为目标,每次并入一个,最终生成最小生成树。
每次并入的步骤:
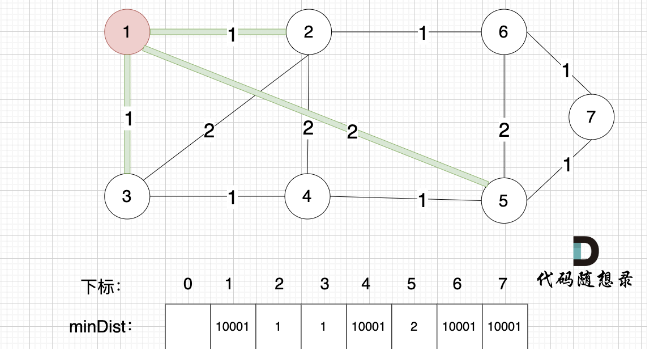
- 确定选哪个节点并入 (不在最小生成树里的,距离最小生成树(已并入的点)最小的节点) 遍历每个点,得到最小距离的那个点及最小距离。 (顶点编号)
- 将第一步选到的点加入到最小生成树中,用一个bool列表记录已经加入的点。
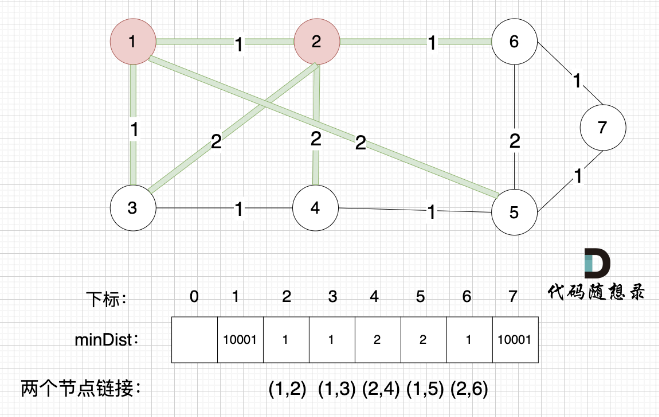
- 更新非生成树节点到生成树的距离。 (与cur相连的某节点的权值,比该节点距离最小生成树小 =》 因为cur加入最小生成树后,其他节点需要更新距离这个最新形成的部分最小生成树距离) =》 观察4这个节点随着各个节点的加入,距离最小生成树的最小值的变化;以及最终作为被选取的点加入到最小生成树的过程。
如果想记录这个最小生成树的边,则使用parent数组(元素值表示使当前节点更新的前一个节点),在第三步更新时记录即可,如果后续节点的加入还会使该点更新,则parent数组实际也会更新。
v,e = map(int,input().split()) # 顶点数,边数
graph = [[float('inf')]* (v+1) for _ in range(v+1)] #邻接矩阵for _ in range(e):x,y,k = map(int,input().split())#无向图关于对角线对称,x到y的距离与y到x的距离相等graph[x][y] = kgraph[y][x] = kinTreePoints = [False]* (v+1) #是否加入到最小生成树中
minValVec = [float('inf')]* (v+1) #所有点的最小距离列表,初始化每个距离为10001for i in range(1,v): # 选完v-1个点,最后一个也确认了,它们一起构成最小生成树#1. 确认新加入的点的编号(谁距离最小生成树最近就加谁)cur = 1minDist = float('inf') #最大的权值 for j in range(1,v+1): #遍历所有还未加入最小生成树的点,确认要新加入的点的编号if not inTreePoints[j] and minValVec[j] < minDist:minDist = minValVec[j] #更新最小距离,以便在后续迭代中继续比较cur = j #更新新加入的点的编号,当循环退出时,确定新加入的点的编号#2.记录新加入的点inTreePoints[cur] = True#3.因为最小生成树有了新加入的点,更新每个未确定的点到部分最小生成树的最小距离for j in range(1,v+1):if (j not in inTreePoints and graph[cur][j] < minValVec[j]):#某点到最小生成树的距离可能由于最小生成树新加入了点而改变minValVec[j] = graph[cur][j]res = 0
for i in range(2,v+1):res+=minValVec[i]print(res)
kruskal算法
适用范围: 无向图
思路
以边为中心考虑,不断去添加最小的边合成一个集合(注意要添加不在一个集合的边,否则就是冗余边,会形成环),刚开始组成的图有可能是不连通的,但随着边的添加,最后一定会形成连通图,并且是最小连通子图即最小生成树,这种将点放入同一集合,判断点是否在同一集合中的逻辑,使用并查集来实现。下面简单给出算法(未给输入)。如果需要记录最小生成树的边,对于kruskal算法非常简单,join时添加当前边即可。
class UnionFind:def __init__(self,n):self.father = [0] * (n+1)for i in range(1,n+1):self.father[i] = i# (查) def find(self,u): if u == self.father[u]:return uelse:self.father[u] = self.find(self.father[u]) # 路径压缩(一直像上层返回最底层的值,并且一直赋值)return self.father[u]# 判断 u 和 v 是否找到同一个根def is_same(self,u, v): u = self.find(u)v = self.find(v)return u == v# 将 v->u 这条边加入并查集 (并)def join(self,u, v):u = self.find(u) # 寻找 u 的根v = self.find(v) # 寻找 v 的根if u == v:return # 如果发现根相同,说明在一个集合,不用两个节点相连,直接返回self.father[v] = u #否则其中一根归于另一根#kruskal算法
#1.按照边的权值由小到大排序
edges.sort(key=lambda x: x[2])
unionFind = UnionFind(v+1)res = 0
for edge in edges:if not unionFind.is_same(edge[0],edge[1]):res += edge[2]join(edge[0],edge[1])