二阶非线性自治系统绘制相平面图。假设我们有一个简单的阻尼摆系统,其状态方程可以表示为:
\[
dx1/dt = x2 \\dx2/dt = -cx2 - gsin(x1)
\]
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import odeint # 定义系统的状态方程
def pendulum_eqs(state, t, c, g): x1, x2 = state dx1dt = x2 dx2dt = -c * x2 - g * np.sin(x1) return [dx1dt, dx2dt] # 参数设置
c = 0.2 # 阻尼系数
g = 9.81 # 重力加速度 # 初始条件
initial_state = [np.pi/2, 0] # 初始角度为π/2,初始速度为0 # 时间设置
t = np.linspace(0, 20, 10000) # 从0到20秒,共10000个点 # 使用odeint进行数值积分
solution = odeint(pendulum_eqs, initial_state, t, args=(c, g))
x1, x2 = solution.T # 绘制相平面图
plt.figure()
plt.plot(x1, x2, lw=0.5)
plt.xlabel('Angle (radians)')
plt.ylabel('Angular Velocity (rad/s)')
plt.title('Phase Plane Plot of a Damped Pendulum')
plt.grid(True)
plt.axis('equal')
plt.show()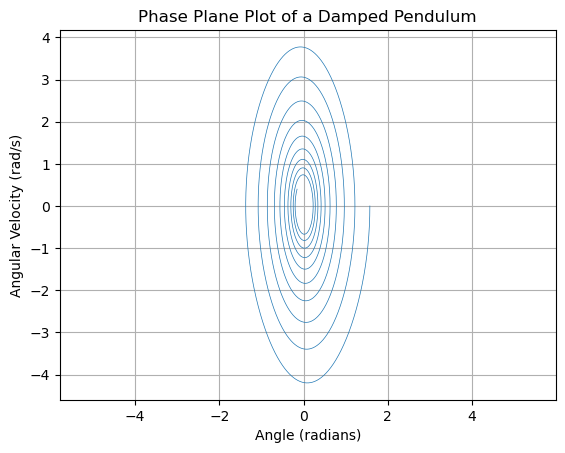

![day11[Lagent 自定义你的 Agent 智能体]](https://img2024.cnblogs.com/blog/3229976/202410/3229976-20241004190222339-141543825.png)