手动安装ROS2
本文以ROS2-jazzy作为示例版本,默认已经安装好ubuntu24.04
设置区域
确保你的语言环境支持UTF-8。只要系统是UTF-8语言环境,基本没有问题,可以不设置。
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # 查看你的设置是否修改成功
但是本博主就没有设置这一步,因为本身就是UTF-8语言环境:
robot@sheep:~$ locale
LANG=zh_CN.UTF-8
LANGUAGE=
LC_CTYPE="zh_CN.UTF-8"
LC_NUMERIC="zh_CN.UTF-8"
LC_TIME="zh_CN.UTF-8"
LC_COLLATE="zh_CN.UTF-8"
LC_MONETARY="zh_CN.UTF-8"
LC_MESSAGES="zh_CN.UTF-8"
LC_PAPER="zh_CN.UTF-8"
LC_NAME="zh_CN.UTF-8"
LC_ADDRESS="zh_CN.UTF-8"
LC_TELEPHONE="zh_CN.UTF-8"
LC_MEASUREMENT="zh_CN.UTF-8"
LC_IDENTIFICATION="zh_CN.UTF-8"
LC_ALL=
启用存储库
需要将 ROS2 apt 存储库添加到系统里。
- 确保Ubuntu Universe 存储库已启用
sudo apt install software-properties-common
sudo add-apt-repository universe
- 使用 apt 添加 ROS2 GPG 密钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
- 将存储库添加到源列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装开发工具(可选)
如果要构建 ROS 包或进行其他开发,还应安装开发工具:
sudo apt update && sudo apt install ros-dev-tools
安装ROS2
- 先系统更新一下
sudo apt update && sudo apt upgrade -y
-
安装
- 安装桌面版,包括ROS2,RVIZ2,demos,tutorials(推荐)
sudo apt install ros-jazzy-desktop- 安装基础版,包括通信库、消息包、命令行工具最基础必要的一些,无GUI工具
sudo apt install ros-jazzy-ros-base -
修改.bashrc
echo source /opt/ros/jazzy/setup.bash >> .bashrc
注意是>>,不是一个>,否则会把你的.bashrc文件清空并只留下一句
source /opt/ros/jazzy/setup.bash
测试安装是否成功
ros2 run turtlesim turtlesim_node
出现一个窗口
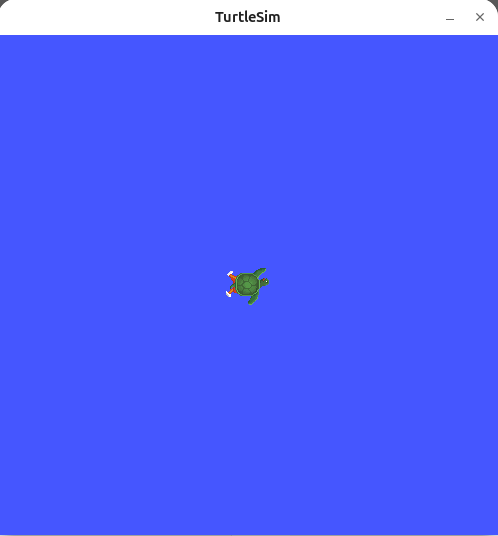
便证明安装成功了。